从城市到矿山!Microdrones 无人机倾斜摄影和三维建模案例
转载 2021-04-29 08:54 镁科众思 来源:镁科众思

Microdrones(中文名:镁科众思)在 2020 年推出了两款高度集成的无人机测量系统:mdMapper3000DμoG 3D和 mdMapper1000DG 3D,专为满足立面测量和三维建模应用需求。
它们通过高度集成的五镜头相机充分捕捉测量对象的所有角度和表面纹理。系统同时配备高精度 GNSS 接收器和惯性导航系统,通过直接定向技术在外业过程中一次性获取所有外方位元素(X, Y, Z 和 ω,φ,κ),从而简化数据处理流程和提升航测效率。

为了展示这两套系统的强大性能和它们生成的高质量的可视化成果,我们制作了四个案例和相应的 3D 模型:
位于加拿大的Microdrones办公室
位于加拿大北部的露天矿场
位于美国北卡罗来纳州的棒球场
位于中国河南省的城区

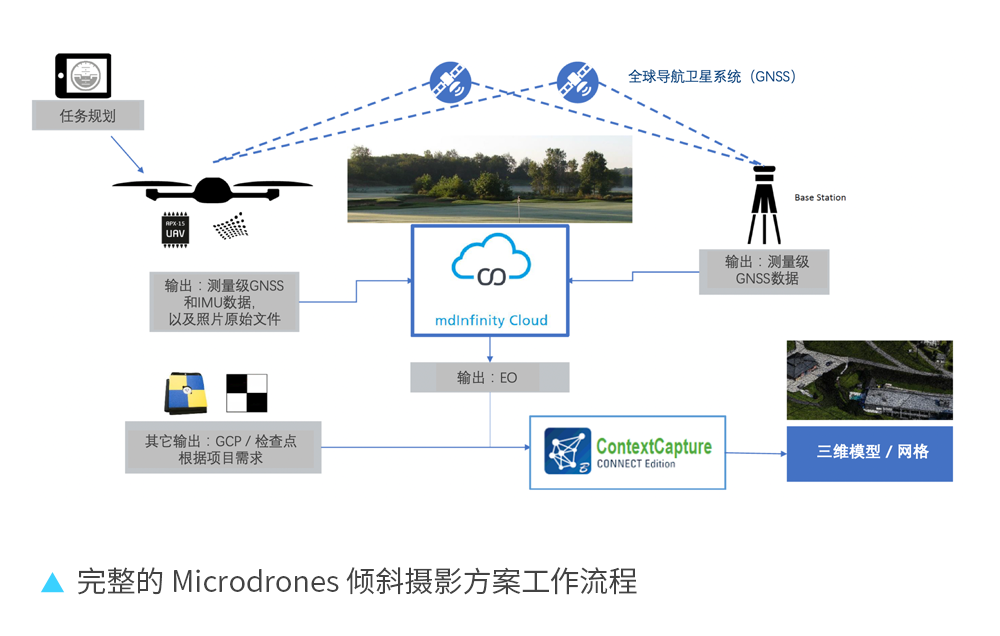
这几个倾斜摄影项目的作业流程和 Microdrones 标准流程一致,由规划、飞行、处理和展示四个环节构成。在任务规划阶段,飞行参数和数据采集方式根据每个三维模型项目的需要设定。全部项目的飞行均在一天内完成。

收集到的数据在 mdInfinity 数据处理平台的轨迹处理模块中进行处理,以提高飞行过程中采集到的传感器位置和姿态信息的准确度,并导出无 IMU 间隙的 EO 文件。最终的 3D 网格以 .3mx 格式输出,在 ContextCapture web viewer 中可视化展示。

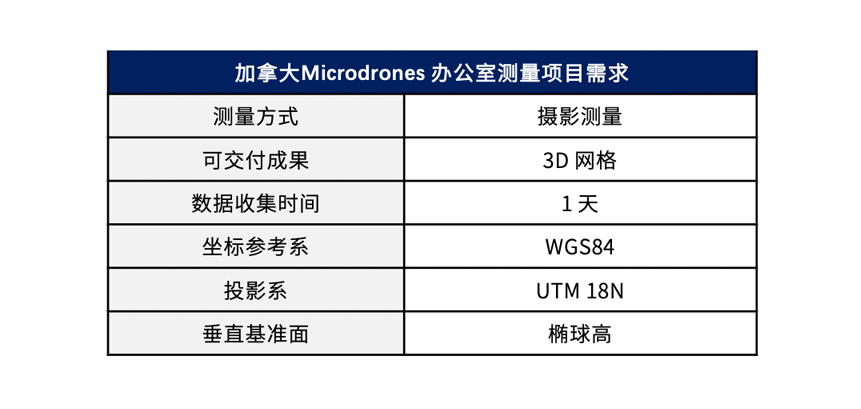
这个测量项目的对象是 Microdrones 位于加拿大 Vaudreuil-Dorion 地区的办公室。测区长160米,宽120米,地势平坦。下表为项目需求汇总。
测试人员使用 mdMapper1000DG 3D 系统飞行了一个架次,飞行高度为80米,速度为3米/秒。飞行时间为20分钟,重叠度为航向80% / 旁向80%。

下表是该测量项目的飞行参数汇总。

现场设置了2个地面控制点(GCP)用于质量控制。检查时可看到所有目标均在目标区域内。目标未被遮挡,目标本身也不存在其他问题。

使用 mdInfinity 数据处理平台进行轨迹处理。可以看到,飞行期间 IMU(惯导系统)测量均保持链接,没有间断。

该 3D 模型精确展示了建筑物的所有屋顶、外墙的边线走向和角度,以及目标区域的地物表面纹理。在少数区域中,阴影与遮挡也导致了模型的一些精密细节的不完善,主要表现在地物角度与线性构成上。
复制打开:https://www.microdrones.com/fileadmin/3d-data/mdCanada/App/#%2F,查看Microdrones 加拿大办公室的 3D 模型。


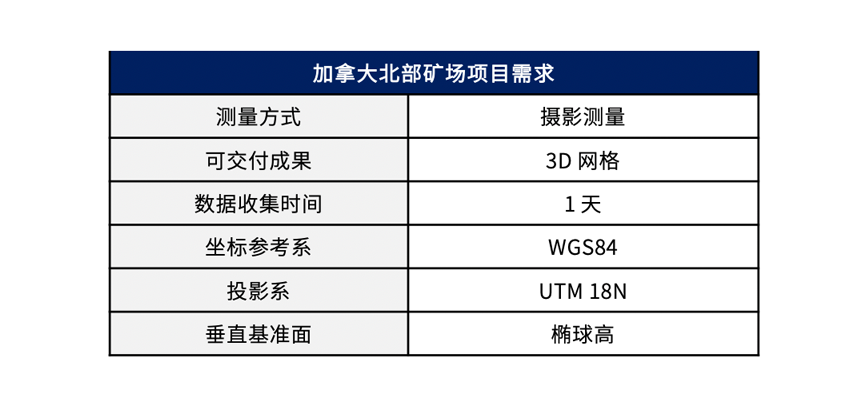
这个3D建模项目的测量对象是加拿大北部的一个矿井。矿区位于一个形状不规则斜坡上,测区长320m,宽180m。
在这个项目中,mdMapper1000DG 3D系统飞行了2个架次。飞行高度为45米,速度为每秒4米。第一次飞行时间21分钟,第二次飞行时间14分钟,重叠度为航向80% / 旁向70%。测试人员布设了2个GCP进行质量控制。

下表是该测量项目的飞行参数汇总。

检查目标质量控制时,看到所有目标均在目标区域内。目标未被遮挡,目标本身也没有其他问题。

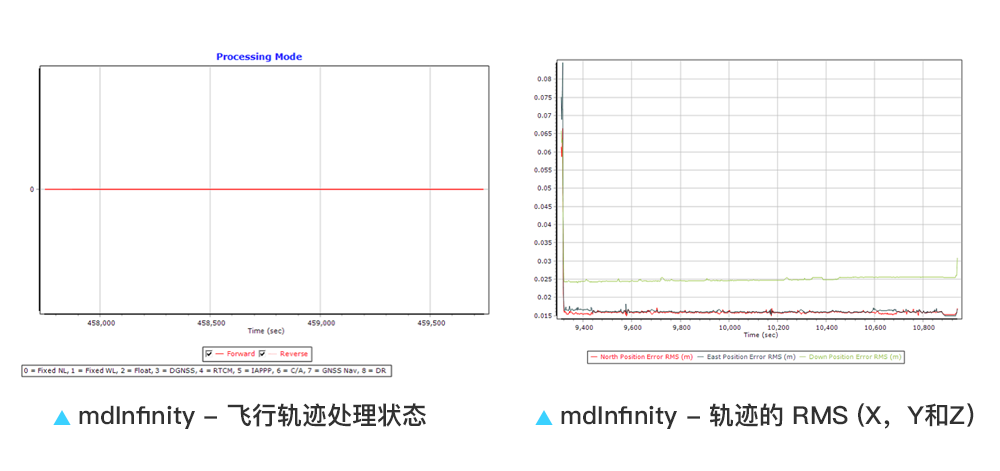
使用 mdInfinity 数据处理平台进行轨迹处理。可以看到,每个架次飞行期间,IMU(惯导系统)测量均保持链接,没有间断。
最后使用 Context Capture 进行照片处理和三维建模。
复制打开:https://www.microdrones.com/fileadmin/3d-data/mine/App/#%2F,查看加拿大北部矿山的3D模型。


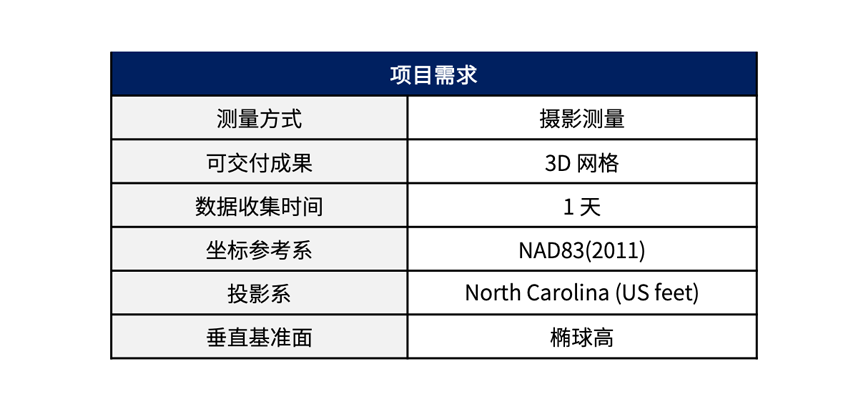
这是位于美国北卡罗来纳州的 High Point Rockers 棒球场。测量区域为240米长、200米宽的平坦斜坡。
测试人员使用 mdMapper3000DμoG 3D 系统飞行了1个架次,速度为每秒4米,采用60米的恒定飞行高度。飞行时间为25分钟,重叠度 80x80。下图为该项目飞行参数汇总表。
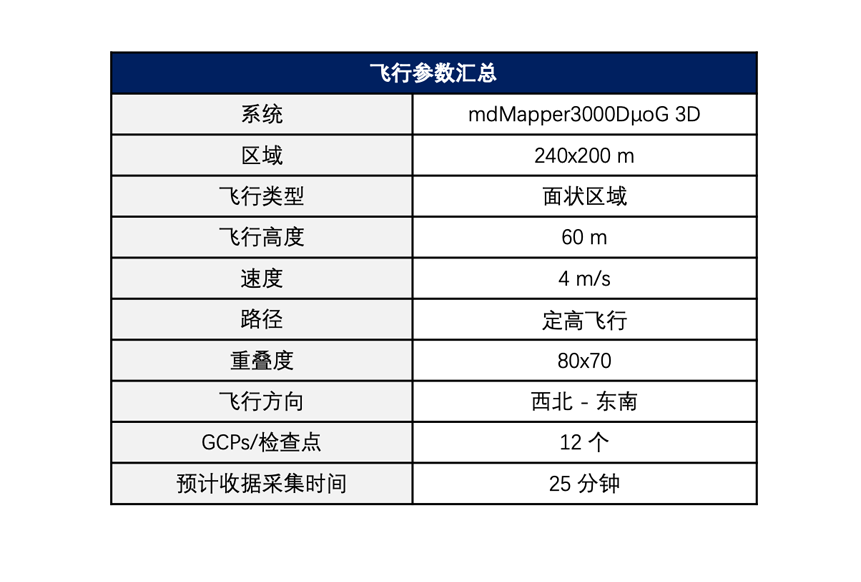
测试人员使用了 12 个地面控制点(GCP)进行质量控制。

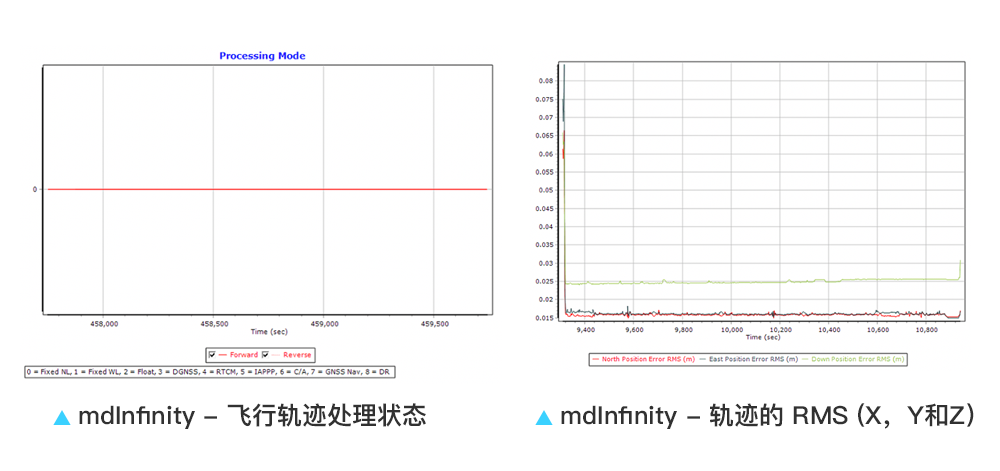
获取数据后,使用mdInfinity数据处理平台进行轨迹处理。可以看到,每个架次飞行期间,IMU(惯导系统)测量均保持链接,没有间断。
经处理的 3D 模型精确展示了棒球场顶部、外墙的边线走向和角度,以及目标区域的地物表面纹理。在少数区域中,阴影导致了模型的一些精密细节的不完善,主要表现在地物角度与线性构成上。此外,屋顶和天篷阻碍了部分体育场内部细节的展示。
复制打开:https://www.microdrones.com/fileadmin/3d-data/stadium/App/#%2F,查看 High Point Rockers 棒球场的 3D 模型。



该测量项目的对象是中国河南省某城区。测量区域长800米、宽600米,为平坦地形,平均海拔高度为70米。

作业当天是微风,约32℃的飞行环境。测试人员使用mdMapper1000DG 3D系统飞行了4个架次,速度为4米/秒,采用80米定高飞行。飞行时间共计2小时,重叠度是航向80% / 旁向70%。飞行过程中共拍摄了约14,400张照片。

下表为该项目飞行参数汇总。

作业人员设置了7个地面控制点(GCP),使用天宝R10连接千寻CORS采集数据,坐标为CGCS2000,椭球高。

以下为处理后的三维模型展示。



如果你希望更多了解 Microdrones 倾斜摄影解决方案,我们在2021年1月举办了一场主题为《免像控、高精度的无人机倾斜摄影方案详解》的线上研讨会,欢迎免费报名观看重播。

