微小无人机的非接触式充电和换电技术
转载 2022-09-07 10:12 空中机器人前沿 来源:空中机器人前沿
你是否设想过某一天你下单的快递由无人机送到你的手里?空中作业机器人在我们生活中有许多应用,如高空电力巡检、空中物流、农业植保等,其中制约空中作业机器人工作的一个问题就是续航问题。如在空中物流作业中,无人机续航只有20-30分钟,可能物品还没运送到目的地就没电了,如何低成本、高效率的解决空中作业机器人的续航问题,是空中机器人走向大规模工业化和民用的一个关键之问。
目前解决无人机续航问题的有以下技术方案:
(1)无线感应充电技术

(a)zhou等小型无线充电装置/(b)GET公司的大型无线充电装置
图1 无人机无线充电装置
无线感应充电技术分为磁感应式充电技术和磁共振式充电技术,磁感应式充电技术通过接近发射线圈的方式感应其中的电流变化,从而实现无线充电,磁感应方式充电原理简单,但其感应距离仅有数厘米。而磁共振式充电技术在磁感应技术的基础上要求发射线圈和接受线圈具有相同的共振频率,充电感应距离可达数米。图(a)所示为zhou等设计的一种小型磁感应技术无人机充电装置,该装置能够在10cm的距离内保持高于93.6%的传输效率,但其传输功率较小,无人机需要实现高精度自主降落功能。图(b)为Global Energy Transmission(GET)公司研发的大型无线充电装置,一架电动工业级无人机只需在电网上盘旋6分钟就能充满电,无人机充满点后,可以一直飞行到电池快要用尽的时候,然后再进行充电,如此反复,不用着陆或连接电缆。
(2)激光充电技术
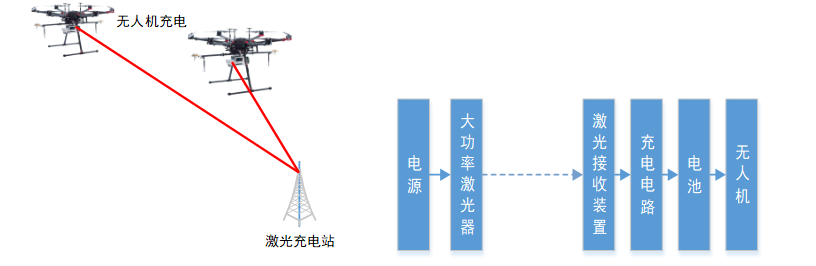
图3无人机空中激光充电原理/图4 无人机空中激光充电图示
激光充电技术将激光发射装置布置到地面,向无人机定向发射激光,无人机上的激光接收装置再将接收到的能量转化为电能实现无人机的空中充电,图3和图4展示了无人机激光充电的原理。在相同的发射机和接收机尺寸和功率的情况下,激光充电技术在理论上可以达到数百米的距离,远远超过磁共振式充电技术。激光接收装置可以做到小体积,容易集成到无人机上。同时激光传输的能量只沿着光束进行传输,不会对其周围的电子设备造成电磁干扰,保证了其周围工作设备的安全性。2012年,洛克希德·马丁公司在LaserMotive的帮助下,使用基于激光的充电系统演示了其“跟踪者”(Stalker)无人机(重达17.5磅)连续飞行了48小时。无人机激光充电技术虽具有种种优点,但是无人机的大功率远程传输还有些关键问题需要解决,如激光发射的对准问题,远距离能量传输等,待其技术成熟还需漫长的等待时间。
(3)定点换电技术
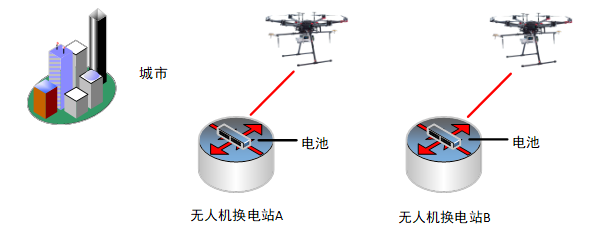
图5 无人机定点换电技术

图6 Airobotics公司研发的自主换电无人机
当无人机没电时,会自动定点降落到离无人机最近距离布置的无人机换电站上,进行电池的更换。对于换下来的电池换电站会自动进行充电,换电原理如图5所示。采用换电技术无人机能够在短时间内重新获取能量,赋能效率高。换电技术涉及到无人机的定点高精度降落,并与换电站机械臂搭配实现换电,是目前空中运输机器人的主要运用技术。图6所示为以色列Airobotics公司研发的无人机换电站,目前以色列批准Airobotics公司研发的无人机可以在无人操作的情况下飞行,Airobotics成为全球首家获得此类批准的公司。
(4)飞行电池技术
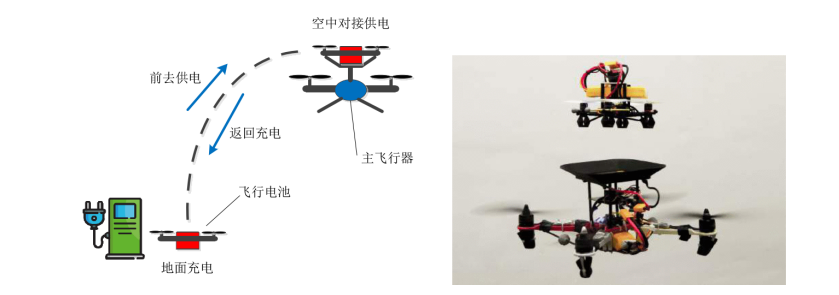
图7 飞行电池技术实现原理/ 图8 Karan等作者提出的飞行电池技术
飞行电池技术由Karan等作者提出,当主飞行器在空中使用主电池执行任务时,飞行电池可以飞向主四轴飞行器并停靠到其上面。然后主四轴飞行器将其电池切换到二次电池。一旦二次电池耗尽,会有另外一个电池替代,如此循环重复直到主电池耗尽。主电池只在飞向电池脱离时使用,采用此方法可以大大提高无人机的续航时间。如图7所示为飞行电池的工作方式,飞行电池在充满电后与主飞行器对接实现电池切换,切换完成后自主返回实现地面充电,图8为个飞行电池即将停靠在主四旋翼机上的图示说明。经验证,该系统在一次飞行中通过多次切换电池实现了57分钟的续航时间,而不采用该技术无人机只有12分钟的续航时间。
在这个技术中,主飞行器无需降落即可实现电池的更换,但也仅仅是延长了续航时间,当主飞行器没电时还需为其主电池充电,未来或也可尝试采用飞行电池更换主飞行器主电池的方式实现无人机的一直续航。
空中作业机器人的续航方式有很多,但目前市场情况来看无人机充电技术还在迭代,相信不久的将来无人机充电的问题会被慢慢解决。
参考文献
[1]李晓伟. 面向无人机的高能效长续航通信覆盖研究[D].北京工业大学,2020.DOI:10.26935/d.cnki.gbjgu.2020.000110.
[2]Zhou J, Zhang B, Xiao W, et al. Nonlinear parity-time-symmetric model for constant efficiency wireless power transfer: Application to a drone-in-flight wireless charging platform[J]. Ieee transactions on industrial electronics, 2018, 66(5): 4097-4107.
[3]Jain K P, Mueller M W. Flying batteries: In-flight battery switching to increase multirotor flight time[C]//2020 IEEE International Conference on Robotics and Automation (ICRA). IEEE, 2020: 3510-3516.