解码 T16 黑科技:开启智能绕障元年
转载 2019-02-27 10:24 大疆农业 来源:大疆农业
「农田环境复杂障碍物多,影响植保机作业」已成为植保界老生常谈的话题。田间障碍物不仅影响着植保机的作业安全,也影响着作业效率的提升。

面对农田障碍物带来的困扰,我们是如何解决的呢?今天第七期《解码 T16 黑科技》,带大家聊聊 T16 的智能绕障功能。
看过前几期《解码 T16 黑科技》的小伙伴都知道,T16 作为第二代植保无人飞机,新喷洒系统、插拔式结构设计,在多方面提升了作业效率。而对于在作业过程中,需要手动绕开障碍物这一效率低下且存在一定安全隐患的情况,T16 也给出了新的解决方案——智能绕障,让植保机可以高效地自动绕开障碍物。
T16 智能绕障
那么问题来了,要实现智能绕障,植保机要具备哪些部件呢?小编细数一下,主要有以下四大模块:
•雷达(或视觉感知系统):感知、跟踪并提取障碍物位置及大小信息;
•导航:根据雷达提供的信息构建全局地图,规划绕行路径,计算绕行控制指令;
•飞控:执行导航的飞行控制指令,负责植保机的底层控制;
•APP:推送绕行的步骤和提示,显示障碍物位置及规划轨迹。
配备这些模块后,植保机就拥有了实现自动绕障的基础。

在此前,也有一些植保无人机推出了自动绕障的功能,但就最终效果而言,似乎都很难让飞手满意。
这其中最主要的原因,是因为这些植保无人机只采用了感知系统的瞬时信息进行判断。在这种「障碍物认知不全」的情况下,植保无人机进行绕障时只能「走一步算一步」,机械式 90° 转向侧移一段距离,再「回头看」是否已经为前行的路留出与障碍物的安全距离,如果没有,就继续重复转向侧移与回头看的步骤,一直重复,直到确认前方没有障碍物为止。
那么相比之下,T16 的绕障是如何实现更高效呢?
在第三期《解码 T16 黑科技:DBF 成像雷达篇》里我们介绍过,T16 搭载的DBF 成像雷达,水平测角范围可达±50°,每秒可完成6,000次扫描,结合 SLAM 技术,T16 会将雷达探测到的数据实时加工成无人机周围的立体地图,并进行动态更新。

DBF 成像雷达
这样,T16 对雷达探测范围内的障碍物形状、尺寸都能了如指掌,无需在绕障过程中沉迷于「回头看」。
不仅仅是「看得更清」,T16 还懂得找到绕障的最优路线。
大家应该记得在使用 MG 系列植保无人机作业时,可以打开一个名为「协调转弯」的模式,能使作业效率提升 20%。这个模式原理在于,将无人机在不同航线之间切换时的两个 90° 转向动作优化成两个圆弧形轨迹,让无人机可以以更高的速度切换航线,从而提升作业效率。
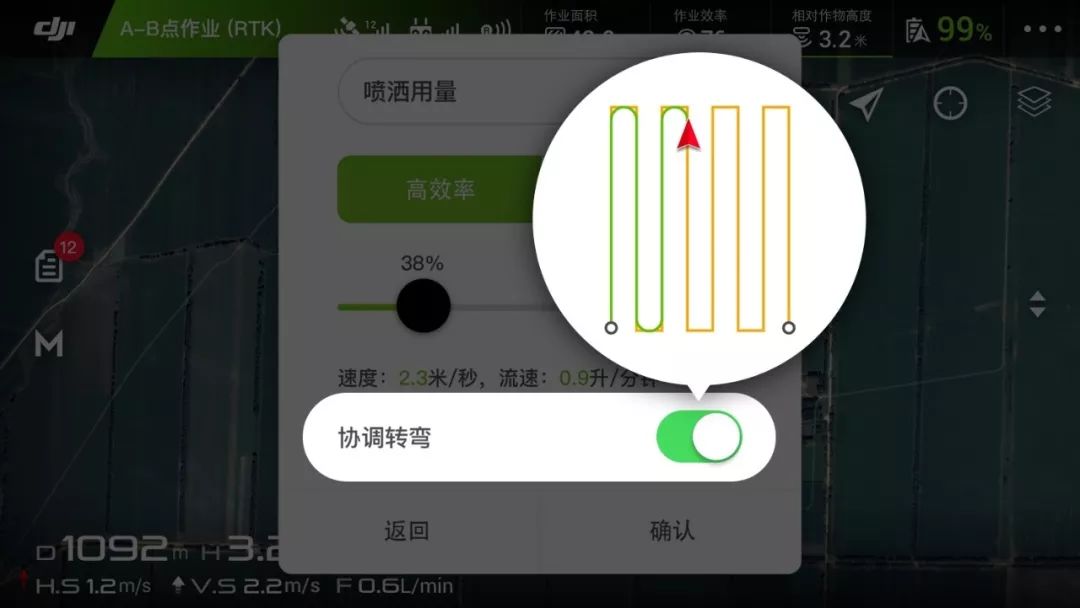
协调转弯
而 T16 的智能绕障与协调转弯有着异曲同工之妙,基于了如指掌的环境信息,T16 在绕障时无需进行效率低下的 90° 转向,系统会在绕障前模拟出若干条平滑的绕行路线,并通过算法找到最佳路线并自动执行,绕障全程如丝般顺滑,提高作业效率。
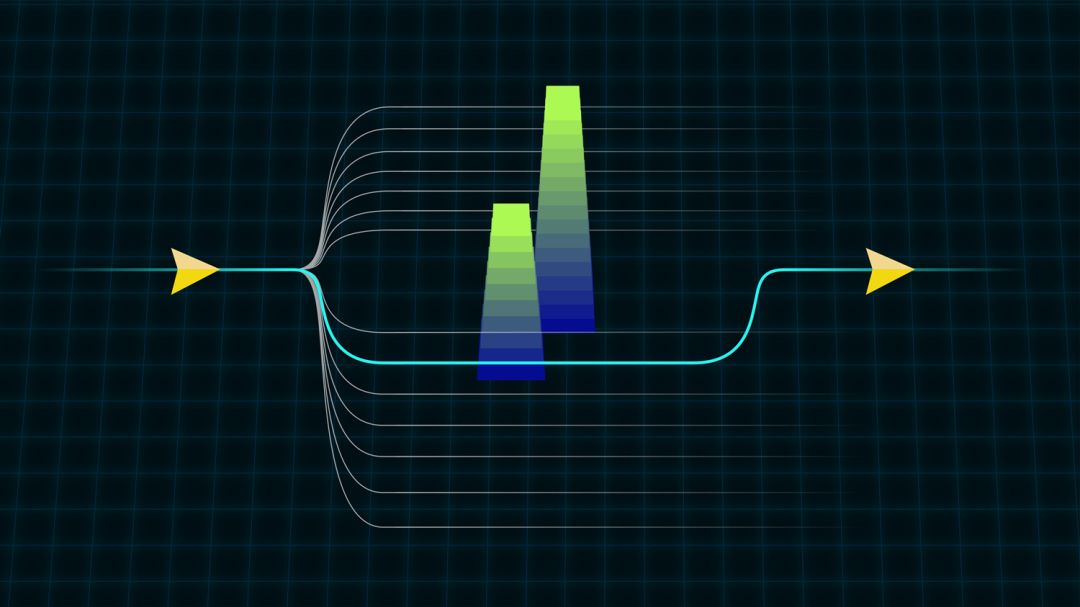
执行最佳绕行路线
除此之外,MG APP 也对智能绕障功能做了不少配合改进。在 T16 执行绕障过程中,MG APP 会对 T16 的绕障状况进行实时飘窗提示,「准备绕行」、「正在绕行」、「绕行完成」都能一目了然,同时画面右下角会显示雷达图,可以直观查看障碍物及绕行航线信息,即便遇到相当复杂的障碍物环境,无法进行自动绕障时,MG APP 也会发出相应提示,这时飞手可以借助 FPV 摄像头,进行手动绕障。
本期《解码 T16 黑科技》就到这里,大家对智能绕障有什么想法,可以在评论区和我们讨论哦~