无人机为什么大多数是偶数螺旋桨
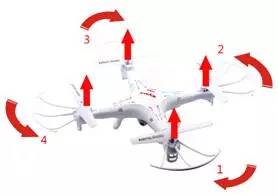
转载 2019-11-03 19:35 玩转单片机 来源:玩转单片机你可能已经注意到了,多旋翼无人机的螺旋桨数量大都是偶数的,奇数的比较少,这是为什么呢?很简单,以图上的4旋翼无人机为例,螺旋桨旋转的时候会产生一个反向的扭矩,如果无人机上没有相应的设计来抵消这个反向扭矩,它就会不停地自旋,也就没法用了。做成偶数桨后,对角线上的两个电机(1、3)转向设置为相同,而另一条对焦线上的两个电机(2、4)转向也相同,但奇数组与偶数组的转向是相反的,于是两组反向的螺旋桨在旋转时产生的反向扭矩就相互抵消了,无人机就不会自旋。
那奇数桨的无人机怎么来解决自旋的问题?其实原理与多旋翼直升机类似,以3桨无人机为例,在每个桨的下面再装一个反向桨,于是3桨就变成了6桨,反向扭矩也抵消掉了,但这样3桨无人机就需要6个电机了,成本比4桨的还高。所以,还有另外一个解决方法,将3桨无人机其中一个桨设置为可调角度,让它产生侧向的分力来抵消自旋,这样就只需要增加一个用来调桨角度的电机。

相关资讯
更多- 从低空蓝图到应用实景,中科星图打造山西长治“低空高速”新模式
- 告别高空高危作业!这款建筑安全体检黑科技,效率飙升 5-10 倍!
- 大语言模型+无人机算法,创造无限可能,你的算法由你来定义
- 科技赋能,守护水安全:航天宏图水利遥感SaaS服务平台,让治水更“智慧”
- 电量随时满格!氢航Hypal氢能户外电源,助力晚高峰无人机巡逻效率超级加倍!
- 白鲸航线成功完成W5000飞机全机地面共振试验
- 一探eVTOL之「芯」——想飞起来需要怎样的电池?
- 司南技术π (第7期) | GNSS抗干扰全景实测 —— QC7820芯片对比解析
- 凌云 U15 无人机 GPS 拒止(无 GPS )环境下多源融合导航作业方案
- 数字孪生流域筑牢山洪防线——航天宏图“黑科技”让山洪灾害预警更智能