发明授权专利:一种固定翼无人机翻滚机动控制方法
编辑 2020-01-20 14:25 Lvcoco 来源:无人机网无人机网(www.youuav.com)数据中心援引国家知识产权局的专利数据称,发明授权专利:一种固定翼无人机翻滚机动控制方法,授权公告日:2019.10.22,授权公告号:CN109634293B,申请号:2018114809683,专利权人:浙江大学。
在这份发明专利中,描述了一种固定翼无人机翻滚机动控制方法,所述方法应用在固定翼无人机上,提供翻滚机动过程中各控制通道的自动控制方法。
该发明可通过全姿态组合导航方法,实现360°全姿态无缝导航;通过滚转翻滚控制方法实现固定翼无人机在正飞状态与倒飞状态之间的自主切换并迅速建立平衡;通过俯仰翻滚控制方法合理地运用重力势能,实现安全有效的俯仰翻滚,在保证安全迎角的情况下快速改变无人机的飞行方向,以在空战中迅速脱离险境。
该发明可通过对发动机、操纵舵面进行合理的自动控制,实现固定翼无人机灵活的翻滚机动,使无人机能够在正飞与倒飞之间自主切换,并可快速改变飞行方向。
无人靶机是航空武器系统试验鉴定的重要手段,也是我国实战化建军的重要支撑体系。没有高性能的靶机,就没有高性能的航空武器系统。美国空军耗巨资启动了5GAT第五代隐身靶机项目,为实弹射击训练和武器测试提供一种能模拟隐身战机真实雷达和红外信号特征的全尺寸靶机。
随着国际上隐身战斗机、巡航导弹及侦察机的服役,我国的新型航空武器迫切需要高性能的无人靶机真实地模拟来袭目标地反射特性和飞行特性。而我国现有几型主要高速无人靶机对快速机动目标的模拟能力比较欠缺,无法灵活地在正飞与倒飞状态之间切换,更无法实现全自主地快速翻滚机动飞行动作,因此研究固定翼无人机翻滚机动控制方法,具有非常迫切的需求和重要的意义。
该发明提出了一种固定翼无人机翻滚机动控制方法,该方法可通过对发动机、操纵舵面进行合理的自动控制,实现固定翼无人机灵活的翻滚机动,使无人机能够在正飞与倒飞之间自主切换,并可快速改变飞行方向。
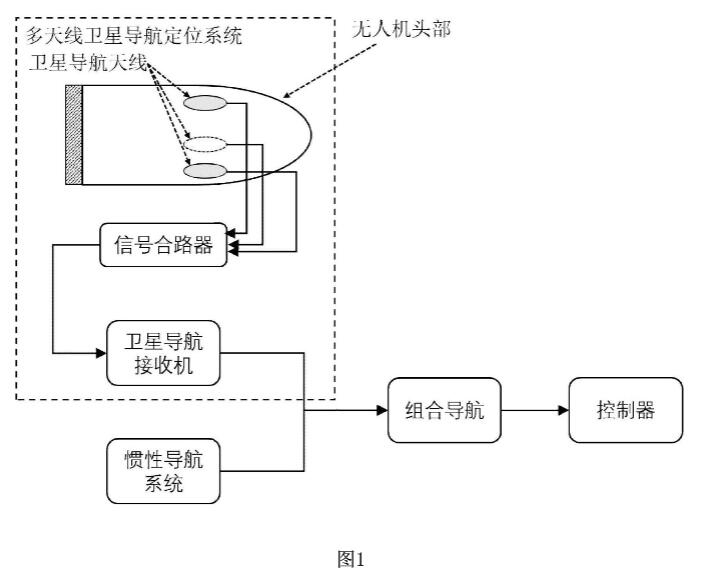
一种多天线卫星导航定位系统示意图
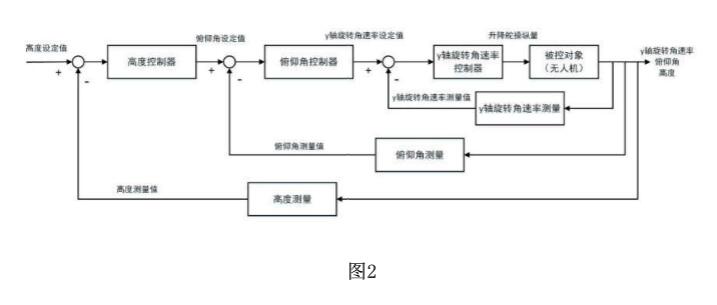
一种三级串级控制结构示意图
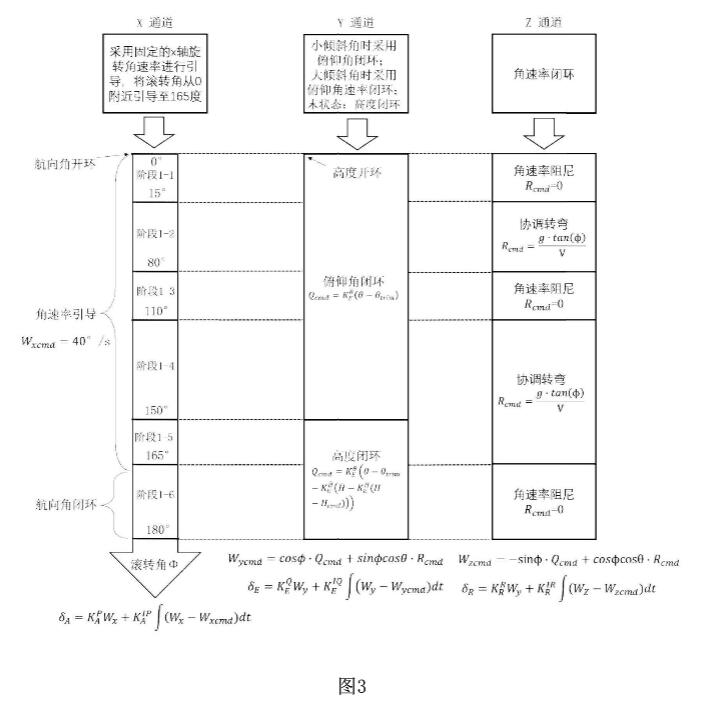
一种滚转翻滚控制流程示意图
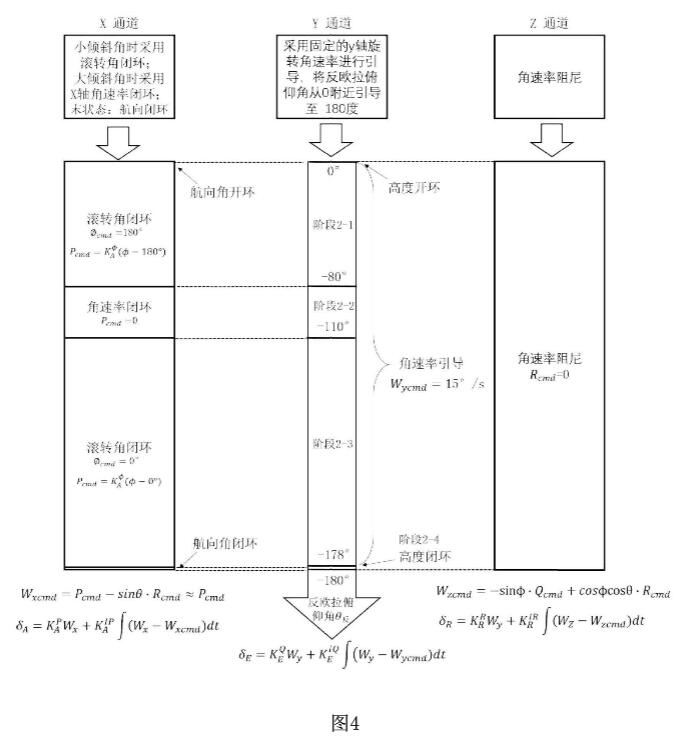
一种俯仰翻滚控制流程示意图
相关资讯
更多- 大语言模型+无人机算法,创造无限可能,你的算法由你来定义
- 科技赋能,守护水安全:航天宏图水利遥感SaaS服务平台,让治水更“智慧”
- 电量随时满格!氢航Hypal氢能户外电源,助力晚高峰无人机巡逻效率超级加倍!
- 白鲸航线成功完成W5000飞机全机地面共振试验
- 一探eVTOL之「芯」——想飞起来需要怎样的电池?
- 司南技术π (第7期) | GNSS抗干扰全景实测 —— QC7820芯片对比解析
- 凌云 U15 无人机 GPS 拒止(无 GPS )环境下多源融合导航作业方案
- 数字孪生流域筑牢山洪防线——航天宏图“黑科技”让山洪灾害预警更智能
- 突破时刻 | 时代飞鹏圆满完成高温极限环境实验,无人机硬核性能获严苛验证
- 星图超算云网:搭建算力桥梁,构建空天信息新基建算力引擎