英媒:海底无人战争是“真实存在的威胁”
原创 2023-01-29 10:09 Mulan 来源:无人机网随着海底基础设施规模的爆炸式增长,海底战争已经从水文测量和扫雷转移。

英国皇家海军水文船 HMS 斯科特在南极洲洛克罗伊港附近停泊。图片来源:POA(照片)
海底战争真正始于 1960 年代的行动,例如美国海军的常春藤钟行动,这是冷战期间美国海军、中央情报局和国家安全局合作窃听苏联海底通信链路的行动。
从那时起,海底的基础设施网络的规模和公民社会对这些网络的依赖已经爆炸性增长。前所未有的管道、光纤和电力电缆的密度穿越海洋,使电信业的数据传输和能源流的天然气、石油和电力的分配成为可能。
安全问题在任何意义上都不是理论上的。萨博销售经理、前英国皇家海军排雷潜水员克里斯-拉德(Chris Lade)在10月巴黎欧洲海军会议上举行的海底作业简报会上说:"今天有一个真实存在的威胁,"。
北流管道在9月底受到的破坏已被广泛宣传,但不太为人所知的是挪威传感器系统在1月份的损失,这仅是今年发生的四起海底基础设施损失事件之一。
独立海军研究员、《秘密海岸》一书的作者H.I. 萨顿(H.I. Sutton)说:"[海底战]是极难防御的,地球上没有一个国家有足够的装备或准备来做防御工作。海军特种部队任务和小型潜艇的故事',强调了防御性行动和远征性、进攻性行动之间的对比。"它经常可以以不可归属的方式进行,这就增加了混合战争的层面,"萨顿在谈到进攻性行动的威胁时继续说道。
海军为应对挑战进行现代化改造
2月,法国海军公布了新的战略海底战理论,而在5月,英国皇家海军与海底的私人运营商会面,表明该地区的海军正在研究海底战的脆弱性。由于获得了建设石油和天然气工业开发的基础设施的经验,人们认为商业部门在大陆架以外深度的海底作业中具有首要地位。
Sutton继续说:"民用部门,如近海石油和天然气,往往比海军的装备更好,"但他们往往不是为秘密行动而设置的。在俄罗斯,民用和海军之间的界限是模糊的,比[西方]更模糊。"
11月,英国国防部(MoD)宣布,它正在优先采购两艘多角色海洋监视(MROS)舰。
GlobalData公司航空航天、国防和安全副分析师James Marques说:"9月底北溪管道的疑似破坏事件使这些漏洞成为焦点,促使国防部加速交付MROS能力。“
最初在2021年3月宣布,第一艘船现在计划在2023年1月进入舰队。
MROS舰将把深潜作业重新纳入皇家海军水文中队的任务集,建立在其多艘监视舰的能力之上。将其纳入皇家舰队辅助部队的目的是通过监测和保护海底通信电缆和能源管道来推进英国的安全,预计这些舰艇将为此携带自主水下船只(AUV)。
英国皇家海军很快就发表了另一份声明,于12月1日宣布它已经订购了其第一艘不载人的潜艇--鲸鱼号。鲸鱼号的建造目的是为了隐蔽地在海洋中旅行,它将监测和倾听可能危及舰队或包括深海电缆和管道在内的重要基础设施的船只或潜艇。
这艘船在尺寸上与皇家海军在过去十年中试验的自主系统形成对比。根据皇家海军的一份新闻稿,最新加入的系统将有12米长,"像一辆公共汽车一样长"。这比目前用于猎取水雷的小型现成AUV要大得多,但仍能装在一个海运集装箱内,以便在世界任何地方运输。
在没有披露其全部操作能力的情况下,皇家海军的新闻稿称,"没有武器的电池供电的船只将能够比目前潜艇舰队中的任何船只下潜得更深,并在一次任务中覆盖多达1000英里。
拉德表示,俄罗斯是“当今最有能力进行海底作业的国家”。他解释说,俄罗斯有一个专门负责深海作战的指挥部,称为 GUGI,通过俄罗斯陆军运作,由特种部队特种部队指挥。
俄罗斯舰队包括各种潜艇以及能力强大的海洋调查船。它有两艘母舰潜艇,最大的一艘基于奥斯卡级潜艇,另一艘是早期三角洲级潜艇的衍生品。它们作为 Losharik 微型潜艇、Harpsichord AUV 和 Poseidon 核鱼雷系统的母舰,提供一系列灵活的应用和威胁。
“他们进行海底作业,这是一系列的事情。他们可以放置传感器,他们可以拦截其他人的基础设施,他们可以调查,他们可以做你可能想在海底做的所有事情。因此,今天存在着真实存在的威胁。”拉德说。
保护海底基础设施的防御方法
从萨博与一系列不同国家的讨论来看,初步具备采取防御行动的能力。莱德推测,一种应对基础设施威胁的解决方案可以从地雷战中获得。作为一名皇家海军扫雷潜水员,他熟悉保护车队的方法,方法是沿着航行路线和调查海床,间歇性地返回重新调查并确定是否发生了任何变化。
保护海底基础设施的衍生方法是调查,例如,整个管道,并考虑在一段时间后返回以重新评估并确定是否发生了任何阻断。这一原则延伸到沿管道设置传感器作为警报系统的一部分,当采取秘密行动时触发。
在解决防御和进攻行动时,监控电缆的能力非常重要。如果海军的操作平台可以驻留在海床上,它就可以在离开基地后立即在海床上巡逻——对于 AUV 或 ROV,该基地将是一个位于海床上的车库。
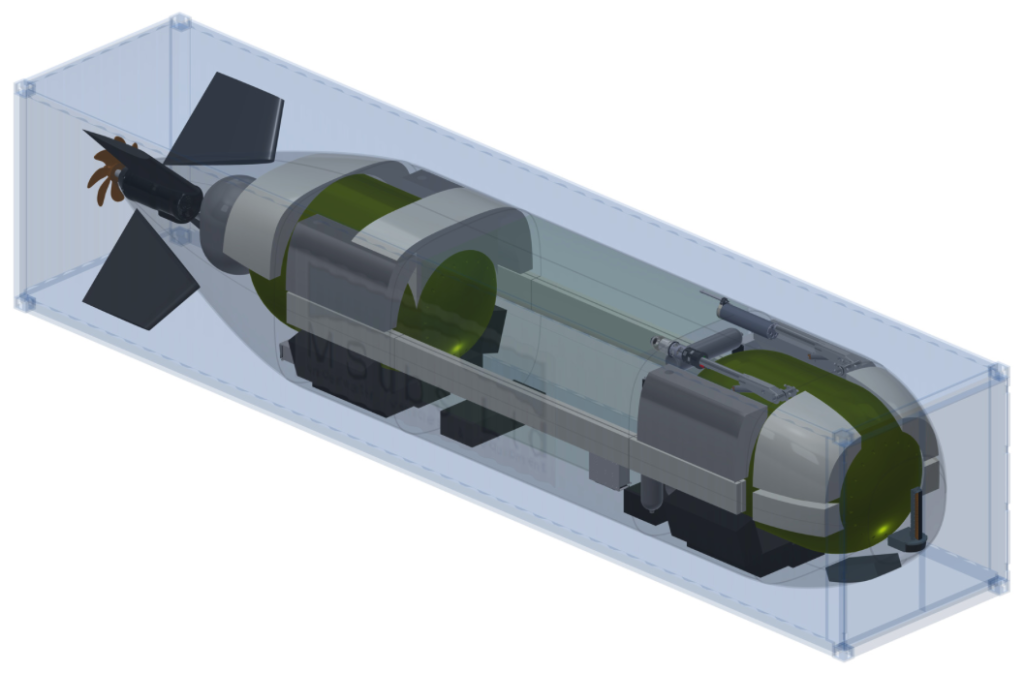
皇家海军第一艘自主潜艇 CETUS 的剖面图,描述在一个 40 英尺的货柜内。图片来源:英国国防部
这样的车库有限制。首先是随着时间的推移,生物和水下生长物会在车库上堆积,需要将其清除。这将取决于它的位置和它所在的海洋区域,但通常 ROV 或 AUV 将在其深度车库中停留六个月,出于同样的原因,AUV 或 ROV 可能必须返回.
另外两个组件对于海床上的船只至关重要,这两个组件都源于通信需求。首先,需要一种通信方式与 AUV 或 ROV 实时交互,或者给它信号,使其可以自主完成任务。其次,需要通信连接来下载船只已获取的数据。在可以连接到现有通信网络的地方,可以直接克服这些问题,防御活动通常就是这种情况。
然而,当在无法连接到岸电通信的位置处于进攻位置时,有必要使用通信浮标将其获取的数据发送回总部。
来自海底环境的挑战
在法国海军今年 2 月发布的战略文件中,以及萨博报告与英国皇家海军和澳大利亚皇家海军的对话中,所表达的期望达到的深度是在海平面以下 6000 米处运行。除了少数例外,当前的商业系统主要运行到 3000 米。这种环境对主要用于这项工作的 AUV 和遥控潜水器 (ROV) 系统提出了一些独特的挑战。
在操作过程中,能见度和声学是海军在海床操作时必须关注的环境因素。深度会降低能见度和声学的使用,此外水的盐度会影响通信和应用声纳。
操作的深度也对设计施加了限制,部分原因是容器所依赖的压力不断增加,而且还因为将动力输送到操作层面的挑战。复合泡沫是在这些深度的许多 ROV 的常用组件。它包括在内以保持浮力并利用材料的不可压缩特性。
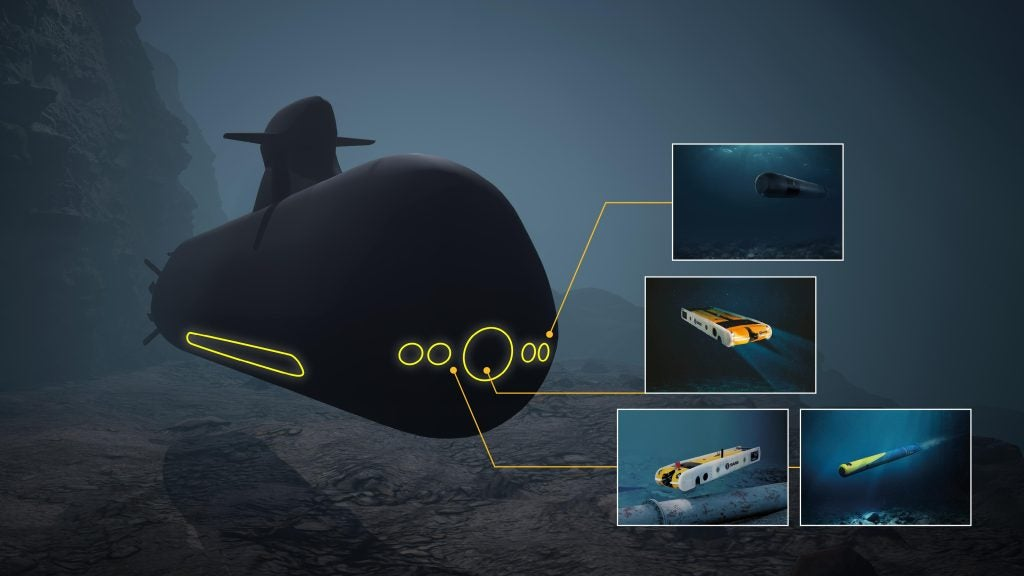
远程和自主水下作战能力正在被整合到新开发的载人平台上。
然而,随着深度和压力的增加,泡沫变得更重,在恶性循环中,系统需要更多的动力才能有效运行,而更重的系统又需要更多的动力。使这一点更加复杂的是,ROV 所消耗的能量通常来自于连接到水面船只的系绳,随着电缆长度的增加损耗越来越大,这对下降的 ROV 提出了挑战。
对于系留 ROV,并发症也可能通过水面船只所经历的条件来实现。在考虑海底战争时,天气通常是一个被低估的因素,但水面以上的恶劣条件可能会阻止水面舰艇在水下操作系统。同样,水流会严重影响使用 AUV 和 ROV(无论有无系绳)的深度活动能力。“潜水员可以有效的最大电流可能是半节。”拉德说。
相关资讯
更多- 首届中国低空融媒大会圆满落幕:共筑新基建,开启低空视觉艺术与融媒发展新篇章
- 从概念落地成为实景!无人机应用场景“多点开花” 低空经济激活千亿市场
- 大漠大邀您共赴 CES 2026 | 和千架无人机共同点亮拉斯维加斯夜空
- 从空中8K全景到水下巡检:CES 2026 无人机创新指向“空水一体”的立体感知网络
- 教育观察④ | AI时代校本课程突围:从“百花齐放”到“三重融合”的体系重构
- 2025企业家博鳌论坛:无人机表演演绎“十五五”新机遇,千机科技携手新华社共绘低空经济蓝图!
- AOPA航拍应用技术课程十二月开班通告
- 火热报名!东莞无人机驾驶员(3-5级)职业技能等级证书,享补贴
- 教育观察③ | “新课标”引领课程转型:科技兴趣班从 “育分” 到 “育人” 的破局之路
- 教育观察② | “馆校协同”打通育人边界,凝聚育人合力