尖端无人机技术:GPS 干扰环境中动态目标跟踪的新方法
转载 2023-08-29 13:58 南山 来源:南山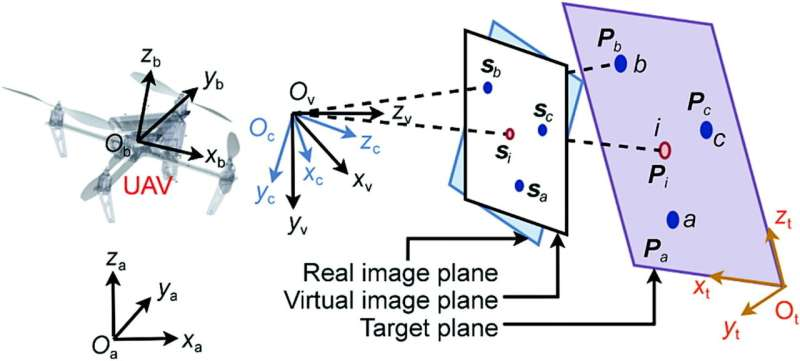
发表在美国《工程学》(Engineering)杂志上的一项研究介绍了一种新颖的基于图像的视觉伺服(IBVS)方法,用于无人驾驶飞行器(UAV)在 GPS 信号缺失的环境中跟踪动态目标。
这篇题为 "无人驾驶飞行器在不可预测干扰下的动态目标跟踪 "的研究文章介绍了一种综合方法,该方法可解决外部干扰下的目标速度估计、图像深度估计和跟踪稳定性等难题。
所提出的方法利用构建的虚拟相机来推导欠驱动无人机的简化和解耦图像动态。考虑到动态目标不可预测的旋转和速度所造成的不确定性,研究人员开发了一种独特的图像深度模型,该模型扩展了 IBVS 方法,可跟踪任意方向的旋转目标。该模型可确保精确的图像特征跟踪和旋转目标的平滑轨迹。
为了估算无人机与动态目标之间的相对速度,设计了一个速度观测器。该观测器无需进行平移速度测量,并可减轻由含噪声测量引起的控制颤振。此外,还引入了基于积分的滤波器,以补偿不可预测的环境干扰,从而增强无人机的抗干扰能力。
利用 Lyapunov 方法对速度观测器和 IBVS 控制器的稳定性进行了严格分析。通过对比模拟和多级实验,说明了所提方法在动态旋转目标下的跟踪稳定性、抗干扰能力和跟踪鲁棒性。


本研究的主要贡献包括:
(1)新颖的图像深度模型:研究人员提出了一种独特的图像深度模型,无需跟踪目标的旋转信息即可准确估计图像深度。该模型使提出的 IBVS 控制器能够追踪任意方向的动态旋转目标。
(2)速度观测器:设计了一个专用的速度观测器,用于估算无人机与动态目标之间的相对速度。这使得所提出的方法可以在 GPS 信号缺失的环境中使用,同时还能减轻因含噪声的速度测量而引起的控制抖动。
(3)基于积分的滤波器:已开发出一种基于积分的滤波器,用于估计和补偿不可预测的干扰,包括动态目标的加速度和环境干扰。这增强了无人机处理动态目标未知运动和外部干扰的能力。
总之,本研究提出了一种动态 IBVS 方法,可显著提高无人机在不可预测干扰下的跟踪性能。通过利用速度观测器、新型图像深度模型和基于积分的滤波器,所提出的方法展示了更强的跟踪稳定性、抗干扰能力和鲁棒性。
利用 Lyapunov 理论对该方法的稳定性进行了深入分析,并通过模拟和实验验证了其有效性。
相关资讯
更多- Infravision筹集9100万美元用于电力行业线路维护无人机项目
- 中国无人机科技为马里共和国打造国家庆典新范式
- “外星战舰”空降内蒙古·康巴什低空盛宴
- AerialMetric 和 Shearwater 助力马达加斯加医疗无人机网络建设
- AirMatrix 和 Robin Radar 联合推出 AI 驱动的反无人机解决方案
- Dolunts® 为多个行业应用提供可定制的连续无人机解决方案
- Unusual Machines 的 Aura VTX 获得 DIU Blue UAS 认证
- DroneDeploy 推出 Progress AI 实现施工跟踪自动化
- Embention 获得无人机和 eVTOL 自动驾驶系统的 AESA 授权
- High Lander Aviation 推出新型无人机空域管理系统