SU17科研版(开发者版本)全新上线!四大亮点功能打造二次开发新引擎
转载 2024-12-11 09:55 阿木实验室 来源:阿木实验室AMOV SU17-科研版
四大亮点功能
01 EGO-Swarm路径规划避障
SU17无人机具备实时解析动态障碍物并灵活绕行的能力,同时能够快速追踪调整目标点,最高速度达2m/s,在复杂未知场景中展现卓越的灵活性与适应性,大幅提升任务效率与执行精度,支持多样化任务需求。


02 快速准确建立三维环境地图
SU17无人机具备强大的环境感知能力,在飞行过程中快速采集周围环境数据,并实时处理为三维环境地图,为各种任务提供精准的空间认知和导航支持。

03 四目视觉SLAM
BSA-SLAM是一套视觉惯导VIO/SLAM系统,该系统以四目相机和IMU为传感器,通过四路图像感知周围环境,并结合来自IMU的加速度和角速度数据,完成无人机的自主定位功能,从而保证地面站定位数据的稳定性和可靠性。

04 仿真功能Demo,快速移植
提供配套的仿真和教学例程,便于开发者通过持续的仿真测试和实机测试优化代码和参数,以提高系统的稳定性和避障成功率。



软件特性
1
AMOVLAB
Prometheus V2软件系统
开发平台基于ROS和Prometheus开源框架,功能丰富,提供多样化二次开发接口,支持高效开发。涵盖状态数据(定位、飞行模式、电池、IMU等)和控制接口(位置、速度、加速度、姿态等),并附示例程序。内置飞行安全检查功能(非避障),支持异常自动降落,降低炸机风险,提升开发安全性。

2
AMOVLAB
ASDK软件包
ASDK (Amovlab Software Development Kit) 是 AMOVLAB 为 SU17 系列推出的软件开发包,提供基于 DDS 的标准化接口,便捷访问多目相机、云台、GPS 等硬件及 SLAM、路径规划等软件资源。用户通过调用 API 实现快速交互,并可基于其扩展设计自定义功能,简化开发流程。

3
AMOVLAB
Prometheus地面站系统
Prometheus地面站基于Prometheus系统,采用Qt开发的人机交互界面,支持无人机状态监控、数据三维可视化和一键操作(悬停、降落、位置控制等)。提供可DIY功能按钮,支持自定义脚本和消息发送,显著提升操作便捷性、效率和扩展性。

硬件介绍
1
AMOVLAB
硬件AIO一体化
SU17整机平台高度一体化集成,将飞行控制器,图数传,电调,电源管理以及机载计算机等模块一体化设计,极大的提升整机的稳定性。
2
AMOVLAB
易于扩展
提供2路串口,2路网口(其中一路网口具备时钟同步功能PTP),2路typeC接口,一路USB2.0,另一路USB3.0。可扩展支持MID360三维激光雷达,UWB等传感器。

3
AMOVLAB
硬件时间同步
SU17无人机上的四目摄像头同步精度30微秒以内,提供系统级别的图像和IMU调用SDK接口。

4
AMOVLAB
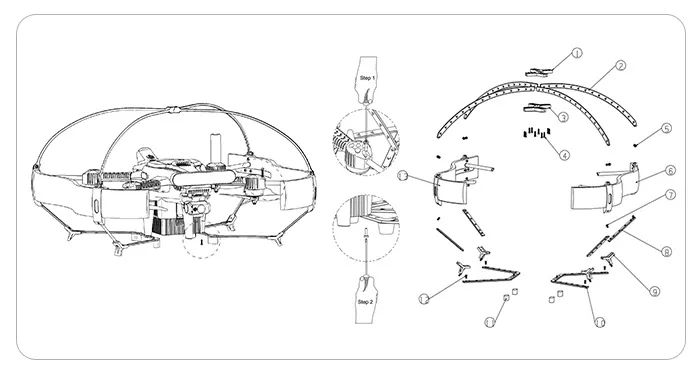
快拆安全防护网
SU17无人机结构上突出轻量化,支持快拆安全防护网设计,在科研使用场景中确保足够的产品安全和人员安全。
应用案例
室内巡检
室内巡检的无人机应用一直面临着关键挑战,尤其是定位精度、飞行稳定性和空间适应性等问题,这些因素限制了传统无人机在复杂室内环境中的有效应用。
SU17无人机通过配备四目VIO定位和激光雷达SLAM,结合激光雷达避障技术,成功突破了这些技术瓶颈。它有效解决了室内巡检飞行中的建图、定位、路径规划和避障问题,确保了在狭小空间中的高效飞行与任务执行。
解决了室内定位问题
实现实时避障与动态路径规划
构建数字孪生地图,精准规划航点路径
高效执行拍摄任务
实现视觉识别和视觉引导降落
相关资讯
更多- “她”力量领航亲子科技之旅!白沙滨江飞行营地打造低空经济沉浸式体验新生态
- 首届中国低空融媒大会圆满落幕:共筑新基建,开启低空视觉艺术与融媒发展新篇章
- 从概念落地成为实景!无人机应用场景“多点开花” 低空经济激活千亿市场
- 大漠大邀您共赴 CES 2026 | 和千架无人机共同点亮拉斯维加斯夜空
- 从空中8K全景到水下巡检:CES 2026 无人机创新指向“空水一体”的立体感知网络
- 教育观察④ | AI时代校本课程突围:从“百花齐放”到“三重融合”的体系重构
- 2025企业家博鳌论坛:无人机表演演绎“十五五”新机遇,千机科技携手新华社共绘低空经济蓝图!
- AOPA航拍应用技术课程十二月开班通告
- 火热报名!东莞无人机驾驶员(3-5级)职业技能等级证书,享补贴
- 教育观察③ | “新课标”引领课程转型:科技兴趣班从 “育分” 到 “育人” 的破局之路