Prometheus适配ROS2,助力无人机开发生态全面升级
转载 2024-12-31 09:24 阿木实验室 来源:阿木实验室Prometheus是一套开源的自主无人机软件系统平台,为无人机的智能与自主飞行提供全套解决方案。随着机器人操作系统(ROS)从 ROS1 向 ROS2 的演进,以及无人机生态对高性能、低延迟通信的需求不断提升,Prometheus 项目团队在继承 V2 版本功能的基础上推出 Prometheus_ROS2版本。这一版本实现了对 Ubuntu 22.04 LTS 系统的兼容,同时迁移至 ROS2 Humble,并引入了 XRCE-DDS 作为高效的通信中间层,同时还推出了基于 MAVROS2 的版本以支持不同的开发需求。
升级内容
1
AMOVLAB
兼容 ROS2 Humble 并支持 Ubuntu 22.04 LTS
Prometheus完全支持 ROS2 Humble 版本,运行于 Ubuntu 22.04 LTS 系统。相比 ROS1,ROS2 提供了更强的跨平台支持(包括实时系统和嵌入式设备)、分布式通信架构以及更高的实时性和可靠性。通过迁移至 ROS2,Prometheus V3 能够在多无人机协作、复杂任务计算、分布式智能等场景中表现出更优异的性能。
ROS2优势:
分布式架构:去除了中央节点管理器,采用DDS通信中间件,实现节点间直接通信,提高系统实时性和可靠性。
先进通信机制:支持不同的QoS配置,优化数据传输,减少延迟和丢包,适应复杂网络环境。
跨平台支持:不仅支持Linux,还扩展至Windows、macOS及RTOS,提供广阔开发空间。
实时性提升:通过优化通信机制和减少系统开销,显著提高实时性能。
优化开发体验:支持模块化开发和测试,提供丰富API接口,简化开发工作。
2
NEWS TODAY
引入 XRCE-DDS 通信中间层
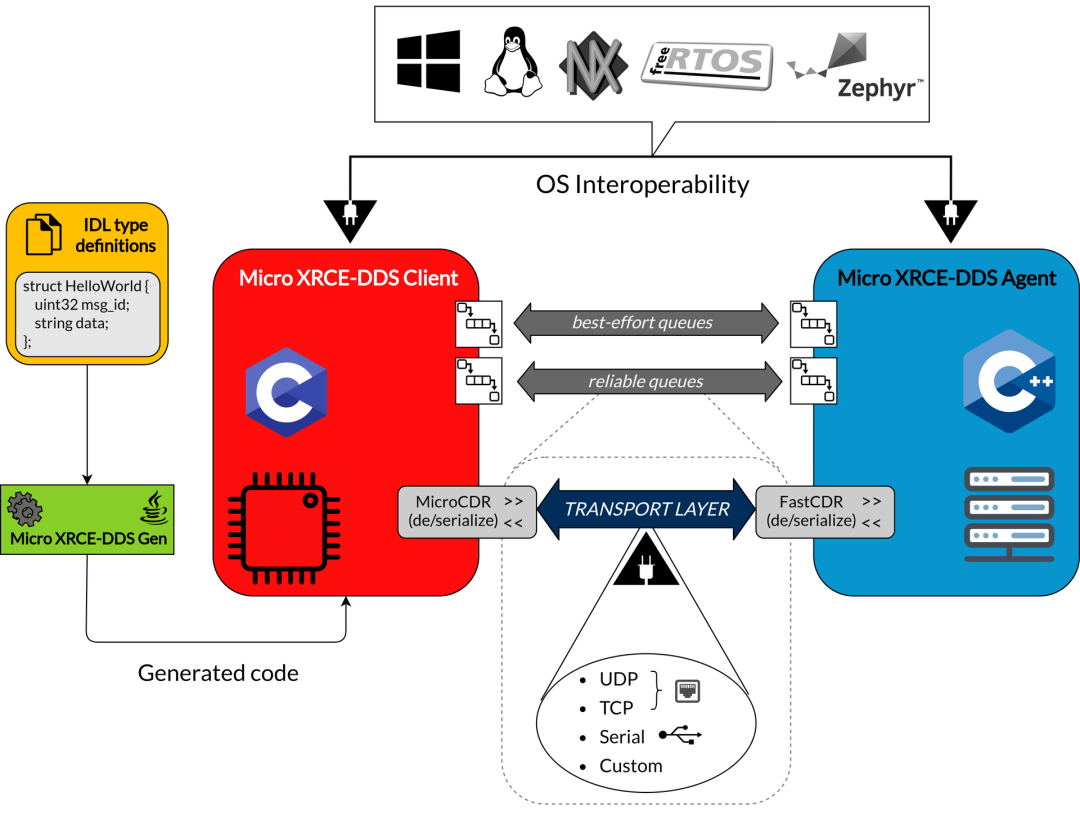
XRCE-DDS(eXtremely Resource Constrained Environment DDS)是 DDS(Data Distribution Service)的轻量化实现,专为资源受限的嵌入式系统设计,能够提供高效的点对点和分布式通信能力。
优势:
极低的资源占用:XRCE-DDS 针对嵌入式设备进行了优化,资源占用极低,适用于计算能力有限的硬件平台(如微控制器、无人机飞控板等)。
轻量级协议:相比标准 DDS 协议,XRCE-DDS 的消息头更短,减少了传输开销。
高效的点对点通信:通过可靠的实时通信机制,实现设备之间快速数据交换。
跨平台支持:与全功能 DDS 实现(如 Fast DDS、Connext DDS 等)无缝集成,支持复杂的分布式系统设计。
高扩展性:XRCE-DDS 支持分布式系统和动态节点发现,可以轻松扩展到多无人机协作和分布式任务场景。
QoS(服务质量):与标准 DDS 一致,支持对通信的可靠性、延迟、带宽等进行精细化控制,确保关键数据的可靠性和实时性。
在 Prometheus中:XRCE-DDS 被用作通信中间层,实现 Prometheus 与 PX4 飞控之间的高速数据交互。Prometheus 通过 XRCE-DDS 获取来自 PX4 的实时状态信息,如姿态、位置、速度、传感器数据等,同时支持向 PX4 发送控制指令(例如姿态控制、速度控制、位置控制等)。相比传统的 MAVLink 协议,XRCE-DDS 显著降低了通信延迟和资源开销,使 Prometheus 能以更高效的方式与 PX4 进行互联。
3
AMOVLAB
推出 MAVROS2 支持版本
为了满足开发者对 MAVLink 框架的需求,Prometheus同时也推出了基于 MAVROS2 的支持版本。MAVROS2 是 ROS2 中 MAVLink 的扩展实现,继承了 MAVROS 在无人机控制中的成熟生态。通过 MAVROS2,开发者可以快速访问 MAVLink 消息接口,完成与 PX4 的通信配置。
优势:
成熟生态:MAVROS2 是 MAVROS 的升级版,兼容 MAVLink 协议的完整功能,拥有广泛的社区支持和丰富的工具链。
易用性:MAVROS2 提供了现成的话题、服务和工具(如 mavlink_console、ros2 topic 等),降低了无人机开发的门槛。
稳定性:MAVLink 协议经过多年发展,具有较高的稳定性和可靠性。
4
AMOVLAB
升级通信架构与模块化设计
Prometheus 对通信模块进行了全面优化,通过 XRCE-DDS 和 ROS2 的分布式通信框架,Prometheus 具备了动态节点发现、可靠数据传输和低延迟通信能力。同时,Prometheus_ROS2 版本重新设计了模块化架构,方便开发者根据实际应用需求自由组合功能模块。
Q
DDS与MAVROS2如何选择?
如果用户追求最新,那么选择XRCE-DDS可以带来的显著优势:实时性和通信效率高,也就是提供更高效的性能和更低的延迟。但如果用户还是习惯 MAVLink 框架,或者还是需要 MAVLink 框架,选择MAVROS2, 更易用,工具支持更丰富,现有的资料都很齐全完整,用户根据自己需求选择。

实操效果
1
AMOVLAB
位置控制
您的浏览器不支持 video 标签2
AMOVLAB
轨迹控制
您的浏览器不支持 video 标签3
AMOVLAB
速度控制
您的浏览器不支持 video 标签除了上述举例,Wiki里面还有更多控制指令,等待大家解锁。
Prometheus作为无人机开源生态的重要升级,全面融合 ROS2 和 XRCE-DDS,通过支持 Ubuntu 22.04、ROS2 Humble 及兼容 MAVROS2,提升了通信效率和系统性能,同时保留了对传统 MAVLink 用户的支持,标志着无人机开发新阶段,为任务规划、多机协作和智能感知等领域提供更优方案,在未来,Prometheus 将持续优化,支持更多的硬件平台和技术发展,助力无人机智能化的快速演进。目前Prometheus先移植的是uav_control部分(12232024),其他部分会随着研发的深入不断推出,请大家敬请期待。
资料获取
WIKI链接:http://u5a.cn/DcroB
关注阿木实验室公众号,发送PrometheusV3或Prometheus_ROS2即可获取进群信息,进入Prometheus学习交流群,与广大开发者共同进步。
相关资讯
更多- “她”力量领航亲子科技之旅!白沙滨江飞行营地打造低空经济沉浸式体验新生态
- 首届中国低空融媒大会圆满落幕:共筑新基建,开启低空视觉艺术与融媒发展新篇章
- 从概念落地成为实景!无人机应用场景“多点开花” 低空经济激活千亿市场
- 大漠大邀您共赴 CES 2026 | 和千架无人机共同点亮拉斯维加斯夜空
- 从空中8K全景到水下巡检:CES 2026 无人机创新指向“空水一体”的立体感知网络
- 教育观察④ | AI时代校本课程突围:从“百花齐放”到“三重融合”的体系重构
- 2025企业家博鳌论坛:无人机表演演绎“十五五”新机遇,千机科技携手新华社共绘低空经济蓝图!
- AOPA航拍应用技术课程十二月开班通告
- 火热报名!东莞无人机驾驶员(3-5级)职业技能等级证书,享补贴
- 教育观察③ | “新课标”引领课程转型:科技兴趣班从 “育分” 到 “育人” 的破局之路