低空经济+无人智能:基于RflySim无人机集群控制技术分享
转载 2025-01-16 20:37 飞思实验室 来源:飞思实验室
在当今科技飞速发展的时代浪潮中,无人机集群控制技术犹如一颗璀璨的新星,正迅速成为低空经济领域的一大亮点,同时也成为众多研究者竞相探索的热点领域。
无人机集群如同自然界中的鸟群、鱼群一般,能通过协同合作完成复杂任务,展现出强大的群体智能。然而要实现这种协同,控制方式的选择至关重要。接下来我们一同探究无人机集群的两种控制方式:集中式控制、分布式控制,尤其是分布式控制所独具的魅力。
集中式控制
高效却受限
集中式控制好比是将无人机集群的“大脑”集中在一个地方,所有无人机都听从这个“大脑”的指挥。这种方式下,集群中的无人机将自身的传感器数据发送到一个中心节点-由中心节点进行统一处理和决策-再将指令下达给各个无人机。这种控制方式能够充分利用强大的后端计算资源,实现复杂的任务规划和精确的协同控制,就如同一个精心编排的舞蹈,每一个舞者(无人机)都按照导演(中心节点)的指令精准地完成每一个动作。
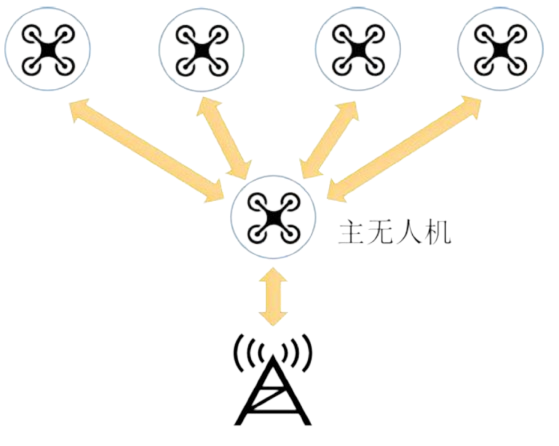
然而,集中式控制也有其明显的局限性。首先,它对网络带宽和通信质量要求极高。大量的传感器数据需要实时传输到中心节点,一旦网络出现延迟或拥塞,整个集群的协同就会受到影响。其次,中心节点的计算负担非常重。随着无人机数量的增加,数据处理的复杂度呈指数级上升,很容易出现性能瓶颈。而且,一旦中心节点出现故障,整个集群就会陷入瘫痪,系统的可靠性较低。
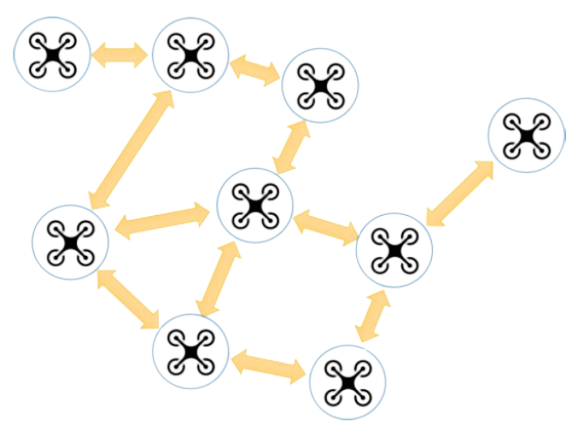
分布式控制
灵活而强大
与集中式控制不同,分布式控制将控制权分散到每一个无人机上,每个无人机都具备一定的自主决策能力,它们通过相互之间的通信和协作,共同完成任务。这种方式下,无人机之间没有绝对的主从关系,每个个体都既是执行者,也是决策者,其控制特点如下。
• 自主导航与决策
在分布式控制中,每个无人机都配备有先进的传感器和计算单元,能够自主感知周围环境,如通过摄像头识别障碍物、通过GPS定位自身位置等。基于这些感知信息,无人机可以自主做出决策,比如调整飞行姿态、规划避障路径等。这种自主性使得无人机能够在复杂多变的环境中灵活应对,即使在通信受限的情况下,也能够依靠自身的智能完成基本的飞行任务。
• 去中心化的协同
分布式控制的另一个重要特点是去中心化的协同。无人机之间通过局部通信建立连接,形成一个动态的网络。在这个网络中,无人机可以实时分享自身的状态信息,如位置、速度、任务进度等。通过这些信息的交换,无人机能够相互协调,形成有序的队形或协同完成特定的任务。例如,在搜索救援任务中,无人机可以根据彼此的位置和搜索范围,动态调整自己的飞行路径,避免重复搜索,提高搜索效率。
• 强大的容错能力
由于分布式控制没有依赖单一的中心节点,因此它具有很强的容错能力。即使部分无人机出现故障或失去联系,也不会影响整个集群的运行。其他无人机可以自动调整协同策略,填补故障无人机留下的空缺,继续完成任务。这种容错机制使得无人机集群在面对复杂环境和突发情况时,更加稳定可靠。
• 可扩展性强
分布式控制的可扩展性是其最大的优势之一。由于每个无人机都是一个独立的控制单元,增加或减少无人机的数量不会对整个系统的架构和运行机制产生根本性的影响。无论是小型的无人机集群,还是大规模的无人机编队,都可以采用相同的分布式控制策略,只需根据无人机的数量和任务需求进行适当的参数调整即可。这种良好的可扩展性为无人机集群的大规模应用提供了可能,比如在大型的物流配送、环境监测等领域,能够根据任务的规模灵活配置无人机的数量。
无人机集群
分布式控制方式
目前,对于无人机分布式集群控制的方式主要有以下四种。
1. 基于长机 - 僚机的分布式编队控制方法:以长机为领航者,通过层级信息传递链实现队形精确控制,增强编队稳定性。
2. 基于行为的分布式编队控制:预先设计个体行为规则,无人机感知环境后选取相应行为模式响应,通过共享相邻无人机信息协作,但控制精度和队形稳定性较难把握。
3. 基于人工势场的分布式编队控制法:构建引力场与斥力场,无人机在两种力作用下沿势能最低方向前进,实现精准导航与定位。
4. 基于虚拟结构的分布式编队控制方法:将编队视为刚性虚拟结构,无人机跟踪保持虚拟结构中坐标位置完成巡检路线,融入队形反馈信息及相邻控制器通讯,实现速度控制和队形稳定保持。
RflySim工具链中所有应用软件都可以在同一台或多台电脑上多开,并且各个应用之间可以通过UDP网络相互收发消息,这种分布式的构架非常适合于大规模(带视觉)的无人机集群仿真测试;结合强大的Sim2Real技术,可以很好的将仿真中的算法移植到真机中进行实飞测试。

相关案例实现可下载RflySim工具链安装包,安装完成后可在 [RflySim安装路径]RflySimAPIs10.RflySimSwarm3.CustExpse2.PyDISCtrlUAVsSim文件夹中查看相关例程。

相关资讯
更多- “她”力量领航亲子科技之旅!白沙滨江飞行营地打造低空经济沉浸式体验新生态
- 首届中国低空融媒大会圆满落幕:共筑新基建,开启低空视觉艺术与融媒发展新篇章
- 从概念落地成为实景!无人机应用场景“多点开花” 低空经济激活千亿市场
- 大漠大邀您共赴 CES 2026 | 和千架无人机共同点亮拉斯维加斯夜空
- 从空中8K全景到水下巡检:CES 2026 无人机创新指向“空水一体”的立体感知网络
- 教育观察④ | AI时代校本课程突围:从“百花齐放”到“三重融合”的体系重构
- 2025企业家博鳌论坛:无人机表演演绎“十五五”新机遇,千机科技携手新华社共绘低空经济蓝图!
- AOPA航拍应用技术课程十二月开班通告
- 火热报名!东莞无人机驾驶员(3-5级)职业技能等级证书,享补贴
- 教育观察③ | “新课标”引领课程转型:科技兴趣班从 “育分” 到 “育人” 的破局之路