
RTK打点,人机协作巡检的再进化!
从2015年,相关电力公司采用无人机针对高电压等级线路进行巡检开始,多旋翼无人机在电力运维上的应用开始如雨后春笋般的爆发。
初期使用,效果显而易见。最开始,人力巡线的工作方式是:开车、爬山、爬塔、望远镜观察,手抄记录。到现在的人机结合巡检,电力巡检目前的状况已经得到了极大的改善,属于无人机行业应用中发展极为成功的方向之一。
但,山高水远,路依然漫长!

山东莒县供电公司员工在冬天携带热像仪进行巡检(*图片来自百度)

在第一阶段,正常的巡检作业流程是:1-任务派发;2-出车巡线(爬山、爬塔、观察记录);3-缺陷等级分类及确认;4-反馈处理;5-集中停电处理/维护;6-缺陷消除。

人工巡检作业板块
现在的人机协作巡检,已经可以做到2人1台无人机巡检8~12km的配网线路。与主网不同,配网线路往往出问题更多,更复杂,也更直接影响人们的用电。

图为电力职工正在对受损的配网线路进行抢修(图片来自百度)
什么是配网?
配电网是指从输电网或发电厂区接收电能,通过配电设施就地分配或按电压等级主机逐级分配给各类用户的电力网。通常我们所见到的为35kv、10kv线路。

不同电压等级,对应不同的电力杆塔,相应也有其对应的设计标准,能够承载多少线路以及何种线路设备,均有所不同。
其中,常见的杆塔类型按用途分有:1-直线杆、2-耐张杆、3-转交杆、4-分支杆、5-终端杆等
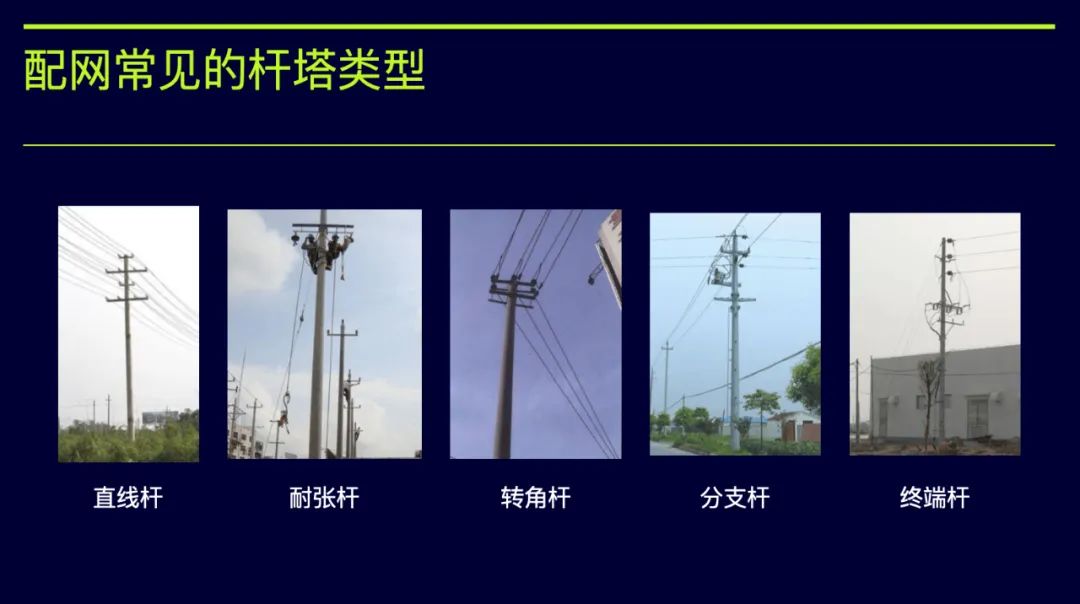
常见35kv杆塔类型(后续有专题讲解)
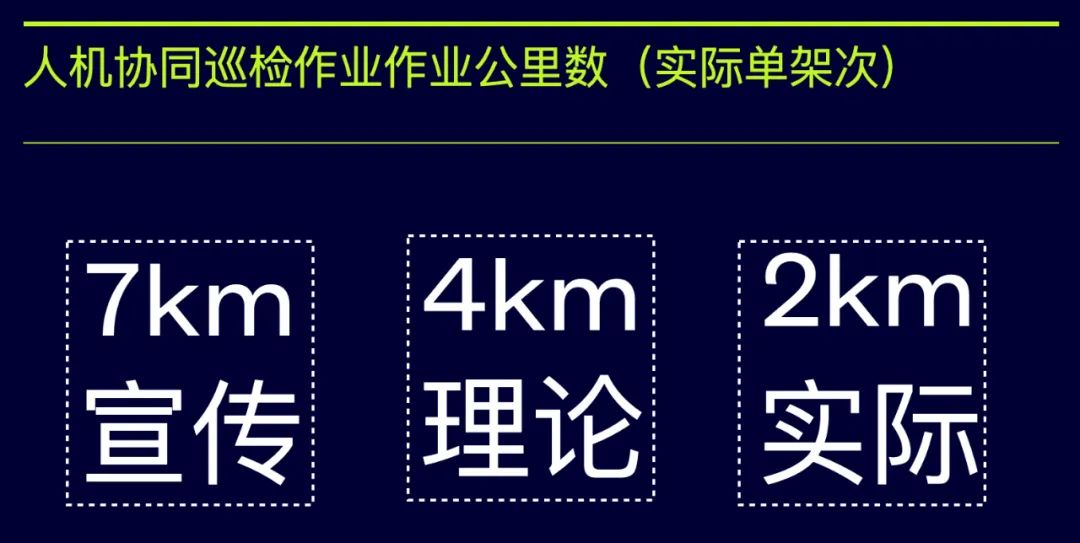
实际受各方面影响后的单架次作业公里数(根据笔者实际作业统计得出)
从第二阶段(人机协作巡检)到第三阶段(人工智能巡检)最大的矛盾就在于:如何用人工智能及GIS、5G、物联网等手段克服作业人员的不确定性。
当作业人员不再受到1-对线路的熟悉程度;2-人员流动性;3-操作失误;4-身体健康因素;等一系列因素影响时,作业效率得到的提升有可能达到其理论单架次的4km到宣传单架次的7km之间,如此一来,提升300%的效率并不是天方夜谭。
由于除农用无人机外,无人机仅具备短暂的一般防水性,可以在雨中完成放飞行返航动作,但,如果持续在雨中飞行,还是会增加一定风险。
而在第二阶段到第三阶段,人工智能可能需要解决的第二的矛盾就是:人工识别分析与大数据统计之后对缺陷的智能分析与识别的矛盾。
此阶段需要的是在人机协作巡检中长期而持续的数据图像积累,训练算法,提升识别度。这个过程十分漫长,推广过程中,往往由于数据积累不够多,识别率不达标,识别目标范围漂移等一些状况,导致深受质疑。
早在2014年,国网山东省电力科学研究院联合山东鲁能智能技术有限公司就发表了《基于RCNN的无人机巡检图像电力小部件识别研究》
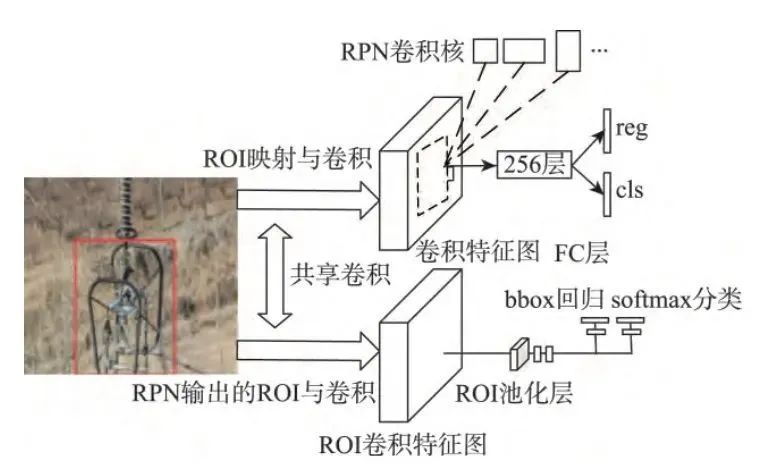
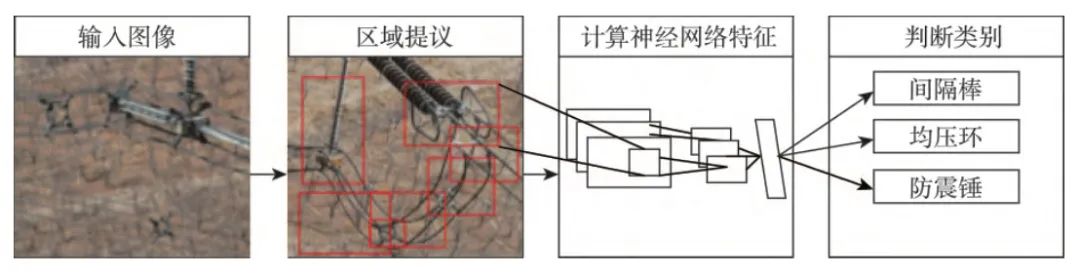
文中提到,使用RCNN方法的四个步骤:1-使用视觉方法生成大量后悬区域;2-对每个候选区域用CNN进行特征提取,形成高维特征向量;3-将这些特征量送入一个线性分类器计算属于某个类别的概率,用于判断包含的对象;4-对目标外围框的位置和大小进行一个精细的回归。用白话说,就是先用视觉算法选取,再对选取内目标进行提取,之后进行结构化分类,最后将选取算法进行优化,使其更精准。
2014年至今已有6年时间,算法及识别率仍然在缓慢提升。但没有停下脚步,我们的目标依然是用机器替代人类识别,用数据替代人类经验,用可靠性取代不确定性,接下来依然是漫漫长路。
算法依然大部分针对的是背景比较干净的样本照片,而在配网巡检中,你会发现,由于线路交错复杂,60%以上的照片不具备干净的背景。

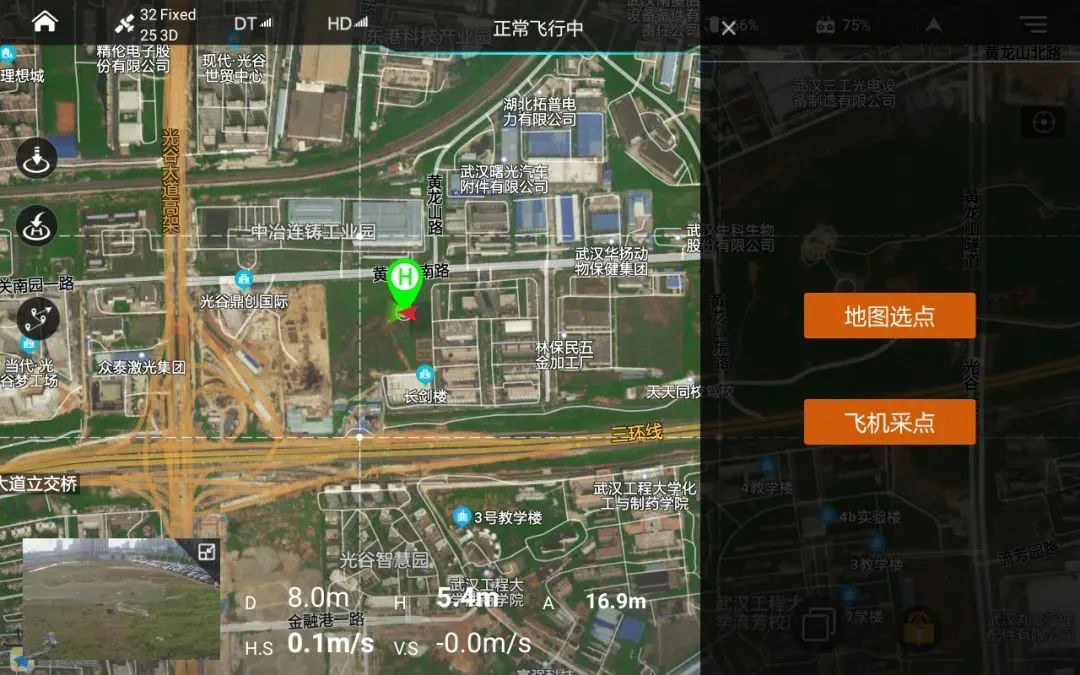
为过渡阶段诞生的无人机RTK打点自动化巡检
在识别算法精确度发展缓慢的现状下,提升巡检作业效率的重任就放在了飞机端。使用带RTK定位技术的无人机,替代人去找线路的过程,替代飞手操作飞机找角度变焦拍摄的过程,让单架次的巡检,变成按下无人机电源启动键,直接等待无人机返航的一个简单的过程。
类似于工厂的自动化生产线,起始端,工人放料,结束端,工人收料整理。整个过程只有开始和结束,让巡检工作不再是一个很依赖技术人员的工作,标准化,始终是提升效率的有利手段。
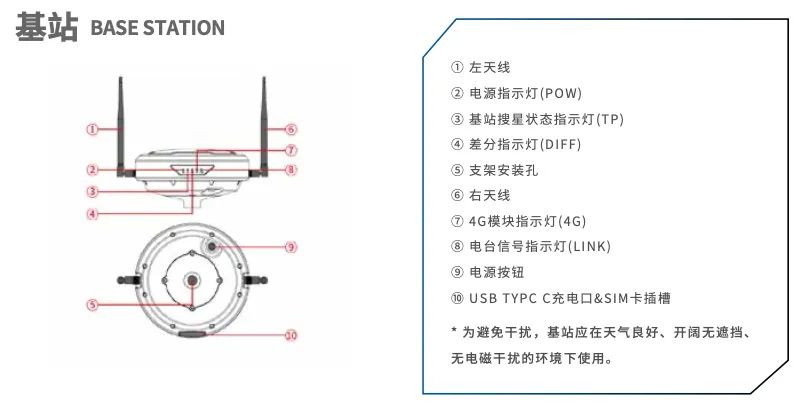
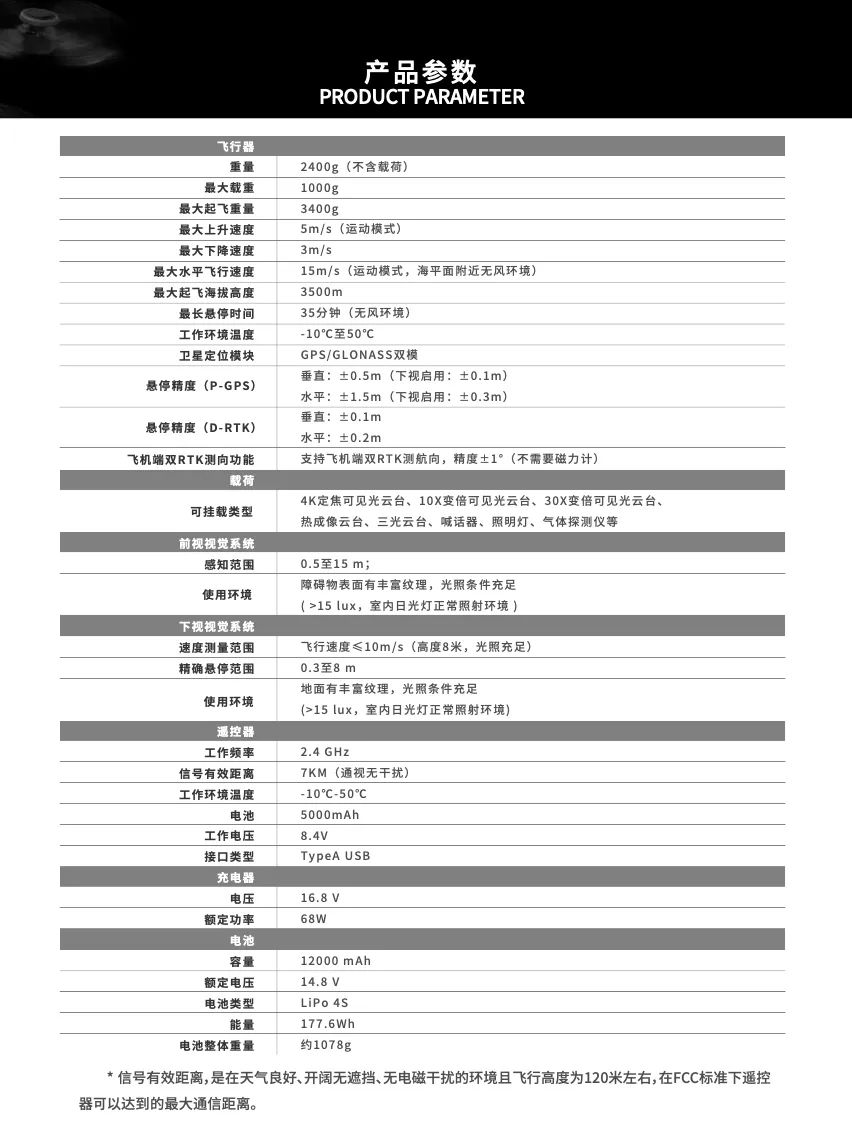
无人机+RTK技术,为实现高效的作业效率,GDU推出了SAGA Pro版本无人机,在SAGA基础上增加双RTK天线定位,实现了1-地面RTK;2-网络RTK双RTK的组合功能。此外,我们还在SAGA Pro上搭载了最新的AI识别算法的计算棒,为更为简洁的边缘计算做准备。
为什么要RTK技术加持?
很多人会问:为什么一定要RTK技术,而不是普通的的GPS定位、北斗定位或者运营商的基站辅助定位就能完成?所有这些问题出现在巡检作业的一个特性词上:复飞。
所谓复飞,就是在记录完成一条线路的所有杆塔点位数据后,后续的巡检任务将采用这条线路的数据进行自动飞行,而无人机所执行的定位情况每一次都有一定的误差,虽然定位误差不存在积累效应,但5m左右的误差半径,将会导致最终在飞行几次之后,航线处于不可用状态。这样,又需要技术人员携带飞机进行重新的航线定点,如此一来,不仅没有提高效率,反而让高技术含量的工作再反复进行,造成时间和人力资源上的浪费。


RTK(载波相位差分)技术的加入,使得使用GPS技术定位5m左右的误差缩小到分米级甚至厘米级。只要航线打点精度保证好,那么在后续的任务执行中,使用地面RTK技术与网络RTK技术混合使用,可以让多次执行航线任务后,其任务航点的误差偏离值在分米级别之内。如此一来,无人机自动化巡检,只管开关机就可实现。
结合断点任务续航功能,当一条线路巡检任务无法单架次完成时,可更换电池后继续执行。
SAGA Pro所使用的网络RTK技术,是由国内领先的定位技术公司——千寻位置提供。
千寻位置是全球领先的精准位置服务公司,提供高达动态厘米级和静态毫米级的定位能力,是IoT时代重要的基础设施之一。公司成立于2015年8月,由中国兵器工业集团和阿里巴巴集团共同发起成立。千寻位置基于北斗卫星系统(兼容GPS、GLONASS、Galileo)基础定位数据,利用遍及全国的超过2400个地基增强站及自主研发的定位算法,通过互联网技术进行大数据运算,为遍布全国的用户提供精准定位及延展服务。
有了网络RTK技术,在不方便设立RTK基站的地点,可利用网络RTK技术实现便捷的亚米级定位。而在网络RTK信号覆盖不好的地方,可以搭配使用地面RTK基站。
用机器替代人力的复杂劳动,用AI技术替代人脑的识别与分析,这就是从人机结合巡检时代走向全自动化巡检的两条必由之路。