上海硅步ROS连载系列42期 3D可视化工具RViz
转载 2017-12-18 08:58 上海硅步 来源:上海硅步
了解ROS是深入学习ROS和进行ROS应用开发的基础,硅步机器人以连载的形式对ROS的基本概念、常用命令及开发应用进行由浅入深的介绍。本期介绍3D可视化工具RViz。
RViz对数据进行三维可视化并进行交互操作,还常用于机器人的运动规划,包括机械臂运动规划、移动机器人路径规划等。本期主要内容有:RViz的安装和启动、显示面板、视图面板和坐标系。
1.Rviz的安装和启动
如果你还没有安装Rviz,请首先运行下面的指令:
sudo apt-get install ros-indigo-rviz
运行下面的指令启动Rviz:
source /opt/ros/indigo/setup.bash
roscore &
rosrun rviz rviz
Rviz首次启动时,你会看到图5-1所示的空白界面:
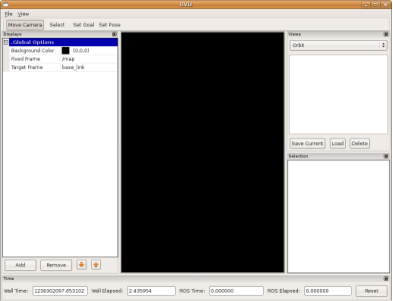
图1 Rviz启动界面
图1中间黑色的区域为3D视图,这里由于尚未载入可视化对象,所以是空的。左侧为显示列表,目前仅显示全局选项和时间视图,右侧是视图和选择面板。
2.显示(Displays)面板
显示面板中间有一个包含了模拟环境下不同参数项的树形列表,该列表中的选项包括点云、轴、网格、标记等。
2.1添加新的显示
要添加一个新的显示,点击底部的“Add”按钮:

Rviz将会弹出如下图所示的新显示对话框:
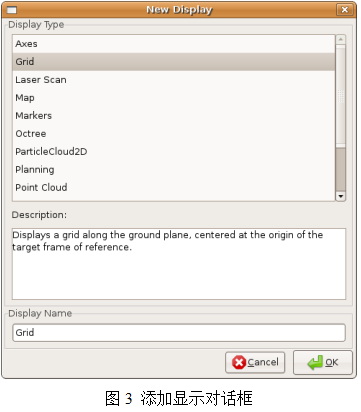
该对话框包括三项内容:显示类型、描述和显示名称。显示类型列表给出了该显示将要可视化的数据类型,描述给出了所选中显示的简要介绍,而显示名称则需要由用户输入一个独一无二的名字。例如,如果你的机器人有两个激光扫描仪,你需要创建两个“Laser Scan”的显示,可以将它们分别命名为“Lase Base”和“Laser head”。
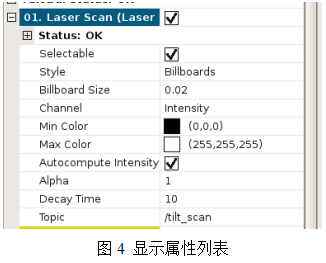
2.2 显示属性
每个显示都有自己的属性列表(如图4),你可根据需要对其属性进行修改。
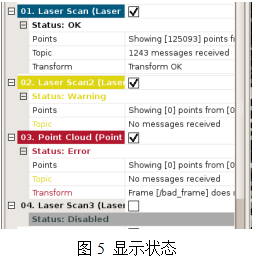
2.3 显示状态
每一显示都有一个相应的状态与之对应,通过状态可以了解某一显示是否正常。状态一共有四种:OK(正常),Warning(警告),Error(错误)和Disabled(禁用)。不同的状态用不同的背景色表示(如图5),黑色为OK,黄色为Warning,红色为Error,灰色为Disabled。
2.4内置显示类型
Rviz内置了许多显示类型,如表1所示。
表1 部分Rviz内置的显示
相关资讯
更多- 气象服务新范式 赋能千行百业 | 中科星图“看天・预见未来气象服务产品发布会”成功举办
- 锁定「看见三亚」:千机科技邀全球品牌共舞海南夜空,独享亿级流量入口
- 民航局就限用类无人机及动力提升航空器适航标准公开征求意见
- 预告:66架电动飞机已下单,即将空降您身边的飞行主题乐园
- 全国首个!云圣智能低空大模型完成双备案,“AI+低空”赋能新场景
- 全国首个低空共享无人机示范区飞行架次首破10万
- 地面机器人尽管受到欢迎,但乌克兰利用其执行任务不到其无人机总任务量的1%
- 世界最小的可编程、全自主机器人在美问世
- Sunflower Labs 获1600万美元B轮融资,致力把无人机安防从概念推向规模化落地
- Packet Digital获得美国防部5000万美元锂电订单