技术 | 影响进入 RTK 因素有哪些?
转载 2017-10-13 07:19 极飞农业 来源:极飞农业
RTK 移动站(如无人机、测绘器)综合GNSS 导航卫星提供的导航数据和RTK 固定站(如固定基站、移动基站)提供的差分数据进行解算,从而获取实时的、高精度的定位服务。
RTK 定位技术
RTK 移动站(无人机、测绘器)进入高精度定位(即 [ RTK ] )状态前,首先依次经历了[ NONE]、 [ Single ]、[ Folat ] 3 种状态。
当 RTK 移动基站采用“高精度采点”的方式架设时,在其进入广播高精度定位数据(即 [ FIX ] )状态之前,首先依次经历了 [ NONE]、 [ Single ]、[ Float ]、[ RTK ] 4 种状态。
名词解释:
[NONE] 表示:无信号状态,移动站的RTK 主机(GNSS RTK 模块或 RTK 智能实时差分仪)未接收到 GNSS 卫星信号、或接收到的 GNSS 卫星颗数太少未能达到解算状态。
[Single] 表示:单点状态,移动站的RTK 主机接收到稳定的、足够的卫星信号,但未收到 RTK 固定站广播的RTCM 差分数据,处于独立(单点)的、低精度的定位状态。
[Float] 表示:浮动状态,移动站的RTK 主机与固定站 RTK 主机(RTK智能实时差分仪 )之间的共用卫星数不足、共用卫星信号不稳定,或接收到的 RTCM 差分数据不稳定,导致移动站 RTK 主机解算的结果浮动不稳定,无法进入高精度定位状态。
[RTK] 表示:实时、高精度定位状态,移动站的 RTK 主机与固定站的 RTK 主机共用卫星信号足够、稳定,且接收到的 RTCM 差分数据稳定、有效。移动站进入实时的、高精度的定位状态。
[FIX] 表示:静态广播状态,固定站的 RTK 主机可通过电台、或 3/4G 移动运营商网络广播稳定、有效的 RTCM 差分数据。
通过以上介绍,我们应当知晓移动站的 RTK 主机能否进入 [ RTK ] 状态,主要取决于两个因素:一是移动站与固定站的共用卫星信号是否稳定足够,二是移动站接收到的 RTCM 差分数据是否稳定有效。
一、共用卫星:
由于 RTK 移动站与固定站相隔一定距离,而且移动站处于移动状态,因此固定站与移动站所处的空间环境有差异,从而导致两者的共用卫星信号处于动态变化状态。
共用卫星
当两者间的共用卫星信号未能达到解算要求,则移动站的 RTK 主机将难以进入、或退出 [ RTK ] 状态。
常见影响因素:
1、天气:如固定站与移动站两地的天气差异巨大。
2、电磁干扰:如移动站运动过程中靠近高压电等强干扰源。
3、地理环境:如移动站运动过程中靠近高大建筑、防风林、大面积水域等。
二、RTCM 差分数据:
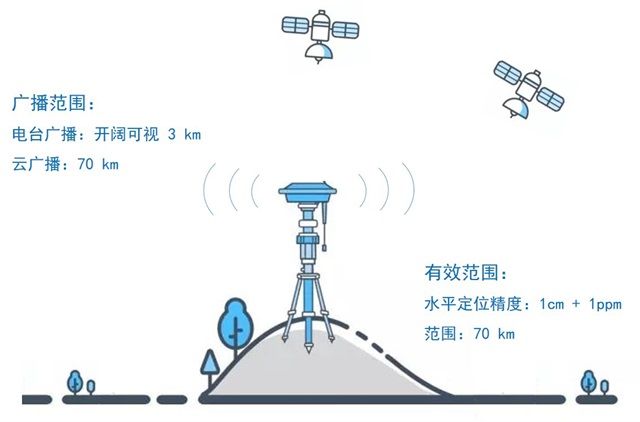
广播范围:
RTCM 差分数据通过无线电电台和 3/4G 移动运营商网络两条独立的数据链路进行广播。
数据的广播链路不同其覆盖范围也有所差异,电台(RF)覆盖范围为:开阔可视距离 3 km。
云 RTK 覆盖范围取决于移动运营商的覆盖范围,理论上可以覆盖全球,但标称范围一般为 70 km 。
有效范围:
极飞 RTK 定位系统的水平定位精度为 1 cm +1ppm (即(10 + 1 × 0.000001 × D )mm),意味着距离固定站每增加 1 km ,移动站的定位误差会增加 1 毫米。
固定站周围的干扰程度和移动站的周边环境也是制约 RTCM 差分数据有效性的因素。通常 RTCM 差分数据本身的有效距离为 50 km(经测试在 50~70 km 的开阔区间 ,其定位精度在可接受范围,因此极飞的限制开放至 70 km)。
数据范围
当 RTK 移动站超出了 RTK 固定站 RTCM 差分数据的广播范围或有效范围,则移动站的 RTK 主机将难以进入、或退出 [ RTK ] 状态。
常见影响因素:
1、距离:距离越远广播信号强度越弱,定位精度越差。
2、电磁干扰:干扰越大广播范围和有效范围越小。
3、地理环境:环境越复杂(不开阔)则对 RTCM 差分数据的影响越大。
综上所述,在各个设备正常的情况下,仍然存在着诸多因素(如天气、电磁干扰、距离、环境等)制约着RTK 移动站 能否正常进入 [ RTK ] 状态。