ROS开放式移动机器人平台:TurtleBot3
转载 2017-11-17 07:43 上海硅步 来源:上海硅步
硅步机器人是TurtleBot3在中国地区的授权经销商,目前已正式发售TurtleBot3,欢迎感兴趣的客户来电咨询。
1. TurtleBot3概述
TurtleBot3是一款新一代移动机器人,具有模块化、紧凑化和可定制的特点。TurtleBot3可为学习和探索ROS以及在教育、研究和产品开发方面创造令人兴奋的应用。
TurtleBot3的目标是大幅度减小平台尺寸、降低平台价格,且不降低性能、功能和质量。可选配机箱,电脑和传感器等部件,TurtleBot3可以通过多种方式进行定制。
TurtleBot3致力于通过应用SBC(单板计算机),深度传感器和3D打印的最新技术进步,成为ROS爱好者的活动中心。

TurtleBot3是合作的产物,合作伙伴包括Open Robotics、ROBOTIS、以及Intel、 Onshape、OROCA。Open Robotics负责软件和社区活动,ROBOTIS负责生产和全球经销。目前硅步机器人(Gaitech Robotics)是中国唯一指定经销商,已正式发售。
2. TurtleBot3特点
同其他支持ROS的移动机器人相比,TurtleBot3具有如下特点:
1)全世界最受欢迎的ROS平台
TurtleBot是用于教育和研究最流行的开源机器人。新一代“TurtleBot3”是一种小型化、低成本、完全可编程、基于ROS的移动机器人。它设计用于教育、研究、兴趣和产品原型。
2)低成本
TurtleBot是为满足学校、实验室和公司的成本需求而开发的。TurtleBot3是配备360度LiDAR的SLAM移动机器人中最实惠的机器人。
3)尺寸小
TurtleBot3 Burger的尺寸只有138mm x 178mm x 192mm (L x W x H)。它的大小只有前代产品的四分之一。想象一下将TurtleBot3放在你的背包里,在任何地方开发你的程序并进行测试。
4)ROS标准
TurtleBot品牌由开放和维护ROS的Open Robotics进行管理。如今,ROS已成为全球所有机器人专家的平台。TurtleBot可以与现有基于ROS的机器人组件集成,但TurtleBot3为任何希望开始学习ROS的人提供了一个成本较低的平台。
5)可扩展性
TurtleBot3鼓励用户使用一些替代品来定制其机械结构:开源嵌入式板(作为控制板)、计算机和传感器。Turtlebot3 Burger是一种两轮差速驱动型平台,但可用多种方式进行结构和机械定制:汽车、自行车、拖车等。使用各种SBC、传感器和电机作为扩展结构,延伸您的想法,超越您的想象!
6)移动机器人的模块化执行器
TurtleBot3通过车轮接头中的2个DYNAMIXEL获得精确的空间数据。DYNAMIXELXM系列可以通过6种操作模式(XL系列:4种操作模式)进行操作:轮子速度控制模式、扭矩控制模式或关节位置控制模式等。DYNAMIXEL甚至可以用于制造移动操纵器,它很轻,却可以通过速度、扭矩和位置控制来进行精确控制。 DYNAMIXEL是使TurtleBot3完美的核心组件。易于组装、维护、更换和重新配置。
7)用于ROS的开放控制板
控制板硬件和软件都是开源的,用于ROS通信。开源控制板OpenCR功能强大,不仅能控制DYNAMIXEL,而且可以低成本地控制常用于基本识别任务的ROBOTIS传感器。各种传感器如触摸传感器、红外传感器、彩色传感器和其他可用的传感器。OpenCR板内有一个IMU传感器,可以增强对无数应用的精确控制。该板具有3.3V、5V和12V电源,以应对更多可用的计算机设备。
8)强大的传感器阵容
TurtleBot3 Burge采用增强型360°LiDAR、9轴惯性测量单元和精密编码器进行研究和开发。 TurtleBot3 Waffle配备了相同的360°LiDAR,另外还提供了一个强大的Intel®RealSense™与可识别SDK。这将会是制造移动机器人最佳的硬件解决方案。
9)开源
TurtleBot3的硬件、固件和软件都是开源的,也就是说用户可以下载、修改和分享源代码。TurtleBot3的所有部件都是用注塑塑料生产的,实现了低成本,然而3D CAD数据仍可用于3D打印。3D CAD数据通过Onshape发布,它是一个全云3D CAD编辑器。用户可以通过桌面电脑、笔记本电脑甚至其他移动设备的网络浏览器进行访问。Onshape允许绘制3D模型你可与同事一起组装。此外,对于想要自己制作OpenCR板的用户,OpenCR板的所有细节例如原理图、PCB gerber文件、BOM和固件源代码都完全按照用户和ROS社区的源码开放许可来开放。您可以修改下载的源代码和硬件,以便与您的朋友一起分享。
3. TurtleBot3产品规格
TuttleBot3有两个版本:Burger和Waffle,其外观如下图所示:
3.1 硬件规格
Burger和Waffle的硬件规格如下表所示:
|
项目 |
Burger |
Waffle |
|
最大平移速度 |
0.22 m/s |
0.26 m/s |
|
最大旋转速度 |
2.84 rad/s (162.72 deg/s) |
1.82 rad/s (104.27 deg/s) |
|
最大载荷 |
15kg |
30kg |
|
尺寸(L x W x H) |
138mm x 178mm x 192mm |
281mm x 306mm x 141mm |
|
重量(+ SBC + 电池+ 传感器) |
1kg |
1.8kg |
|
攀登阈值 |
10 mm 或更低 |
|
|
预计运行时间 |
2h 30m |
2h |
|
预计充电时间 |
2h 30m |
|
|
MCU |
32-bit ARM Cortex®-M7 带FPU (216 MHz, 462 DMIPS) |
|
|
IMU |
陀螺仪3轴 |
|
|
加速度计3轴 |
||
|
磁力计3轴 |
||
|
电源连接器 |
3.3V / 800mA |
|
|
5V / 4A |
||
|
12V / 1A |
||
|
扩展引脚 |
GPIO 18 引脚 |
|
|
Arduino 32 引脚 |
||
|
外围设备 |
UART x3, CAN x1, SPI x1, I2C x1, ADC x5, 5pin OLLO x4 |
|
|
Dynamixel端口 |
RS485 x 3, TTL x 3 |
|
|
音频 |
几个可编程蜂鸣序列 |
|
|
可编程LED |
用户LED x 4 |
|
|
状态LED |
板状态LED x 1 |
|
|
Arduino LED x 1 |
||
|
电源LED x 1 |
||
|
按钮和开关 |
按钮x 2, 复位按钮x 1, Dip开关x 2 |
|
|
电池 |
锂聚合物11.1V 1800mAh / 19.98Wh 5C |
|
|
电脑连接 |
USB |
|
|
固件升级 |
通过USB /通过JTAG |
|
|
电源适配器(SMPS) |
输入:00-240V, AC 50/60Hz, 1.5A @max |
|
|
输出12V DC, 5A |
||
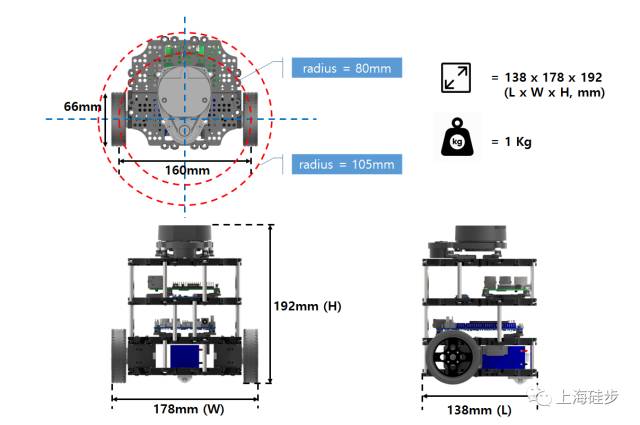
3.2. 尺寸和质量
TurtleBot3 Burger尺寸和质量如下图所示:
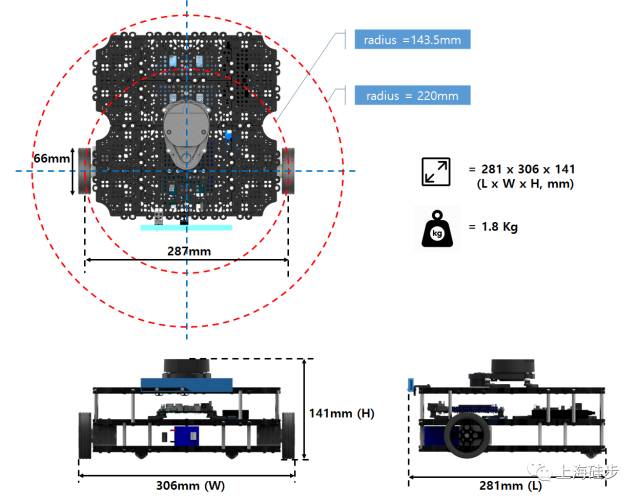
TurtleBot3 Waffle尺寸和质量如下图所示:
3.3. 部件
关于TurtleBot3部件的详细信息请访问下面的链接。
1)单板计算机
Raspberry Pi 3 型号B : https://www.raspberrypi.org/products/raspberry-pi-3-model-b/
Intel® Joule™ : http://ark.intel.com/products/96414/Intel-Joule-570x-Developer-Kit
2)传感器
激光距离传感器: http://turtlebot3.robotis.com/en/latest/appendix_lds.html
Intel® Realsense™ R200 : https://software.intel.com/en-us/RealSense/R200Camera
3)控制板
OpenCR : http://turtlebot3.robotis.com/en/latest/appendix_opencr.html
4)执行机构
Dynamixel X 系列: http://en.robotis.com/index/product.php?cate_code=10121110
相关资讯
更多- 海报剧透:“不止于飞行”的新一代空中机器人,藏着什么惊喜?
- 紫燕 7 月热招岗位|与逐梦者并肩,丈量山河理想
- 以家之名,共赴长空 | 2026沃飞长空家庭日全纪录
- 飞鹏动态 | 时代飞鹏受邀出席中石油昆仑资本2026 产投融协同发展研讨活动
- 【精飞要闻】郴州移动调研精飞产教融合基地、共探产教融合新路径
- 圆满收官!智翔航空全程护航第十六届全国交通运输行业职业技能大赛安徽省选拔赛
- 行业标杆认可!鲲鹏智汇入选2026年度仓储业数智化应用案例
- 中国遥感飞机首飞40周年 航空遥感实现从引进改装到自主创新跨越
- 星逻智能出席低空装备与应用交流会并发表演讲
- 十七年技术沉淀,数万次实飞验证,AT系列固定翼动力耐用可靠看得见!