上海硅步ROS连载系列42期 3D可视化工具RViz
转载 2017-12-18 08:58 上海硅步 来源:上海硅步
了解ROS是深入学习ROS和进行ROS应用开发的基础,硅步机器人以连载的形式对ROS的基本概念、常用命令及开发应用进行由浅入深的介绍。本期介绍3D可视化工具RViz。
RViz对数据进行三维可视化并进行交互操作,还常用于机器人的运动规划,包括机械臂运动规划、移动机器人路径规划等。本期主要内容有:RViz的安装和启动、显示面板、视图面板和坐标系。
1.Rviz的安装和启动
如果你还没有安装Rviz,请首先运行下面的指令:
sudo apt-get install ros-indigo-rviz
运行下面的指令启动Rviz:
source /opt/ros/indigo/setup.bash
roscore &
rosrun rviz rviz
Rviz首次启动时,你会看到图5-1所示的空白界面:
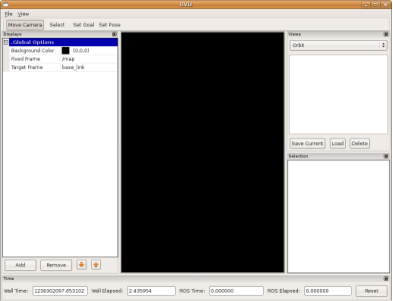
图1 Rviz启动界面
图1中间黑色的区域为3D视图,这里由于尚未载入可视化对象,所以是空的。左侧为显示列表,目前仅显示全局选项和时间视图,右侧是视图和选择面板。
2.显示(Displays)面板
显示面板中间有一个包含了模拟环境下不同参数项的树形列表,该列表中的选项包括点云、轴、网格、标记等。
2.1添加新的显示
要添加一个新的显示,点击底部的“Add”按钮:

Rviz将会弹出如下图所示的新显示对话框:
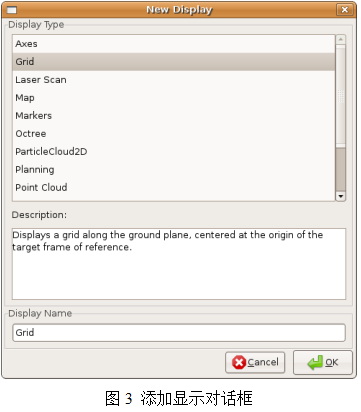
该对话框包括三项内容:显示类型、描述和显示名称。显示类型列表给出了该显示将要可视化的数据类型,描述给出了所选中显示的简要介绍,而显示名称则需要由用户输入一个独一无二的名字。例如,如果你的机器人有两个激光扫描仪,你需要创建两个“Laser Scan”的显示,可以将它们分别命名为“Lase Base”和“Laser head”。
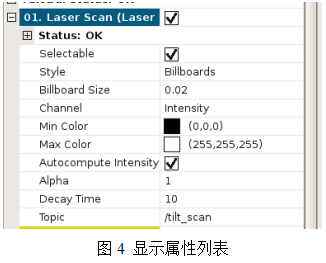
2.2 显示属性
每个显示都有自己的属性列表(如图4),你可根据需要对其属性进行修改。
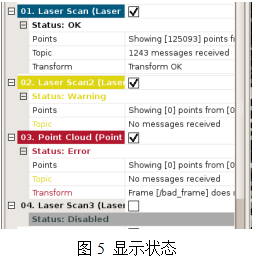
2.3 显示状态
每一显示都有一个相应的状态与之对应,通过状态可以了解某一显示是否正常。状态一共有四种:OK(正常),Warning(警告),Error(错误)和Disabled(禁用)。不同的状态用不同的背景色表示(如图5),黑色为OK,黄色为Warning,红色为Error,灰色为Disabled。
2.4内置显示类型
Rviz内置了许多显示类型,如表1所示。
表1 部分Rviz内置的显示
相关资讯
更多- 海报剧透:“不止于飞行”的新一代空中机器人,藏着什么惊喜?
- 紫燕 7 月热招岗位|与逐梦者并肩,丈量山河理想
- 以家之名,共赴长空 | 2026沃飞长空家庭日全纪录
- 飞鹏动态 | 时代飞鹏受邀出席中石油昆仑资本2026 产投融协同发展研讨活动
- 【精飞要闻】郴州移动调研精飞产教融合基地、共探产教融合新路径
- 圆满收官!智翔航空全程护航第十六届全国交通运输行业职业技能大赛安徽省选拔赛
- 行业标杆认可!鲲鹏智汇入选2026年度仓储业数智化应用案例
- 中国遥感飞机首飞40周年 航空遥感实现从引进改装到自主创新跨越
- 星逻智能出席低空装备与应用交流会并发表演讲
- 十七年技术沉淀,数万次实飞验证,AT系列固定翼动力耐用可靠看得见!