多旋翼植保无人机的结构和原理,真相原来是这样!
转载 2018-01-16 07:43 谷上飞 来源:珠海羽人农业航空
旋翼和轮子一样,是一项神奇的发明,直到喷气式飞机发明之前,旋翼一直支撑着人类的飞天梦。时至今日,很多飞机还在沿用旋翼设计。四旋翼无人机更是化作了植保无人机,满足了许多人们对农田全程机械化的想象。

旋翼的基本理论,玩过竹蜻蜓的朋友应该都知道:当手的搓动给了竹蜻蜓一个旋转的速度后就会产生升力,让竹蜻蜓起飞。

同理,多旋翼无人机也是由电机的旋转,使螺旋桨产生升力而飞起来的。比如四旋翼无人机,当飞机四个螺旋桨的升力之和等于飞机总重量时,飞机的升力与重力相平衡,飞机就可以悬停在空中了。
结构形式
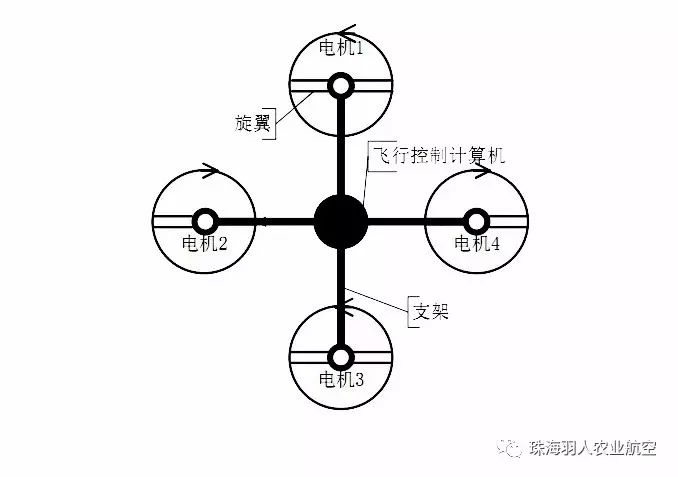
旋翼对称分布在机体的前后、左右四个方向,四个旋翼处于同一高度平面,且四个旋翼的结构和半径都相同,四个电机对称的安装在飞行器的支架端,支架中间空间安放飞行控制计算机和外部设备。结构形式如图所示。
工作原理
四旋翼飞行器通过调节四个电机转速来改变旋翼转速,实现升力的变化,从而控制飞行器的姿态和位置。四旋翼飞行器是一种六自由度的垂直升降机,但只有四个输入力,同时却有六个状态输出,所以它又是一种欠驱动系统。
四旋翼飞行器的电机1和电机3逆时针旋转的同时,电机2和电机4顺时针旋转,因此当飞行器平衡飞行时,陀螺效应和空气动力扭矩效应均被抵消。
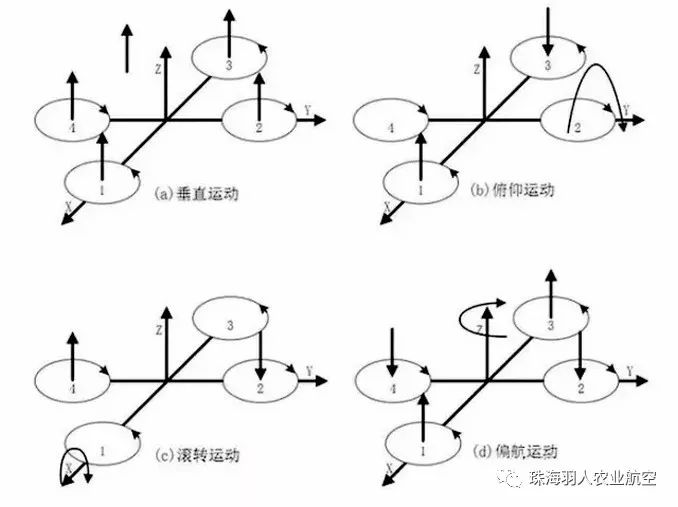
在上图中,电机1和电机3作逆时针旋转,电机2和电机4作顺时针旋转,规定沿 x轴正方向运动称为向前运动,箭头在旋翼的运动平面上方表示此电机转速提高,在下方表示此电机转速下降。
(1)垂直运动:同时增加四个电机的输出功率,旋翼转速增加使得总的拉力增大,当总拉力足以克服整机的重量时,四旋翼飞行器便离地垂直上升;反之,同时减小四个电机的输出功率,四旋翼飞行器则垂直下降,直至平衡落地,实现了沿z轴的垂直运动。当外界扰动量为零时,在旋翼产生的升力等于飞行器的自重时,飞行器便保持悬停状态。
(2)俯仰运动:在图(b)中,电机 1的转速上升,电机3的转速下降(改变量大小应相等),电机2、电机4的转速保持不变。由于旋翼1的升力上升,旋翼3的升力下降,产生的不平衡力矩使机身绕y轴旋转,同理,当电机1的转速下降,电机3的转速上升,机身便绕y轴向另一个方向旋转,实现飞行器的俯仰运动。
(3)滚转运动:与图b的原理相同,在图c中,改变电机2和电机4的转速,保持电机1和电机3的转速不变,则可使机身绕 x 轴旋转(正向和反向),实现飞行器的滚转运动。
(4)偏航运动:旋翼转动过程中由于空气阻力作用会形成与转动方向相反的反扭矩,为了克服反扭矩影响,可使四个旋翼中的两个正转,两个反转,且对角线上的各个旋翼转动方向相同。反扭矩的大小与旋翼转速有关,当四个电机转速相同时,四个旋翼产生的反扭矩相互平衡,四旋翼飞行器不发生转动;当四个电机转速不完全相同时,不平衡的反扭矩会引起四旋翼飞行器转动。在图d中,当电机 1和电机 3 的转速上升,电机2和电机4的转速下降时,旋翼 1和旋翼3对机身的反扭矩大于旋翼2和旋翼4对机身的反扭矩,机身便在富余反扭矩的作用下绕z轴转动,实现飞行器的偏航运动,转向与电机1、电机3的转向相反。
(5)前后运动:要想实现飞行器在水平面内前后、左右的运动,必须在水平面内对飞行器施加一定的力。在图e中,增加电机3转速,使拉力增大,相应减小电机1转速,使拉力减小,同时保持其它两个电机转速不变,反扭矩仍然要保持平衡。按图b的理论,飞行器首先发生一定程度的倾斜,从而使旋翼拉力产生水平分量,因此可以实现飞行器的前飞运动。向后飞行与向前飞行正好相反。(在图b图c中,飞行器在产生俯仰、翻滚运动的同时也会产生沿 x、y轴的水平运动。)
(6)倾向运动:在图f中,由于结构对称,所以倾向飞行的工作原理与前后运动完全一样。
相关资讯
更多- 科技赋能急救・低空筑梦未来|东莞市 “科技 + 急救” 科普讲座走进东莞市电子商贸学校
- 纵横股份签约“空中高德”低空生态,参编《空中高德低空产业白皮书》
- 党建共建强根基,校企融合谋发展——异能无人机党支部与常平成校党支部开展主题党日活动
- 成都硬科技年会启幕,时代星光以世界领先硬科技,彰显军民两用无人机领军实力
- 十年同行,共赴新程——公司组织10周年庆“畅游仙岛湖”主题春游活动
- 慧明捷资讯|慧明捷天枢10系留无人机成功交付江西国网,科技赋能电力应急保障新高度
- 赋能中哈空天合作!航天宏图共建哈萨克斯坦低空经济研究中心
- 喜报 | 空御科技 荣获2026成都硬科技企业扑克牌黑桃上榜企业
- 4月23日·南京 | 星逻诚邀您前往2026江苏新型光伏创新发展大会
- 低空安防新突破,气象感知新未来