乐迪超声波定高避障模块SU04使用说明
转载 2018-06-06 07:51 乐迪电子 来源:乐迪电子
前言:
SU04是个超声波收发一体的测距模块,用于Pixhawk飞控的全向避障和定高。模块可以实现pixhawk水平8个方向的避障、向上防撞、向下的定高等功能。模块的测距范围为40cm~450cm。
功能一:避障
1.固件支持
避障功能需要固件版本大于或等于3.5版本!!!
2.安装模块
连接飞控:用6pin的线连接飞控的telem口,另一端连接模块。如下图所示:

使用模块时,pixhawk不能通过USB供电,需要通过电池供电!!!
3.配置说明
3.1模块选择(pixhawk支持4种避障模块,下面通过设置PRX_TYPE的值来选择本模块作为避障模块)
具体设置:进入-配置/调试界面,点击左侧-全部参数表,在右下角-输入框中输入PRX_TYPE(避障模块类型)并且按Enter键,即可搜索到该参数,将该参数的值左键双击,设置为2(即选择本模块,因为本模块通过telem口的mavlink协议与飞控通信),再点击右侧的-写入参数即可,如图所示:

3.2设置避障距离和打开避障
1)模块的避障距离可通过改变AVOID_DIST_MAX、AVOID_MARGIN这两个值来设置
AVOID_DIST_MAX:定高模式下的最大避障距离,单位m
AVOID_MARGIN:留待模式下的最大避障距离,单位m
2)避障功能的打开/关闭通过改变AVOID_ENABLE值来设置
AVOID_ENABLE:避障功能的打开和关闭,2打开、0关闭
3)具体设置
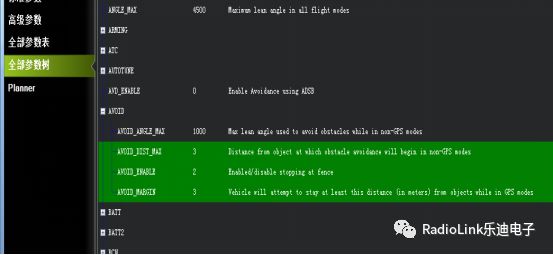
进入-配置/调试界面,点击左侧-全部参数树,左击AVOID,会出现上面三个参数。分别将参数左键点击,设置为AVOID_DIST_MAX的值为3(即3m,有效值为3~4.5)、AVOID_ENABLE的值为2(使能避障,0为关闭避障)、AVOID_MARGIN的值为3(即3m,有效值为1~10),再点击右侧的-写入参数即可,如下图所示:
3.3设置遥控器打开和关闭避障功能(可选)
1)此项是可选项,可跳过
飞控默认在定高模式和留待模式下,避障功能自动打开,切回自稳时,避障功能自动关闭。但是如果想实时通过遥控器来开启或关闭避障功能,需要进行此项设置。如果想只在定高和留待模式下,自动开启避障功能,可以跳过此项设置。
2)设置CH7_OPT参数
进入-配置/调试界面,点击左侧-全部参数表,在右下角-输入框中输入CH7_OPT并且按Enter键,即可搜索到该参数,将该参数的值左键双击,设置为40(物体避障功能),再点击右侧的-写入参数即可,如下图所示

3)遥控器设置
选择一个二挡开关作为控制7通道的开关,在地面站的初始设置界面下的必要硬件的下拉列表中,左击故障保护,打开即可显示7通道的PWM值的界面,当拨动该开关时,7通道的PWM值大于1800,代表开关拨动到该位置时,避障功能打开,拨动到另一个方向是,避障功能关闭。如下图所示

4.数据查看
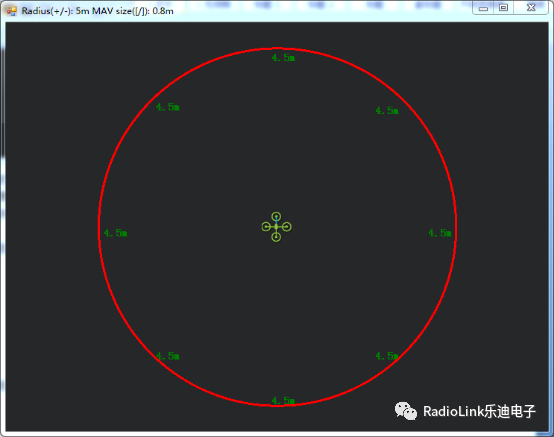
在完成以上配置之后,就可以查看模块的数据,断开Pixhawk重新启动MissionPlanner,在MissionPlanner地面站连接时会自动启动一个新的界面,该界面可以查看模块的数据状态(如果不出现该界面,需要点击桌面任务栏下该界面的图标),如图所示
5.飞行模式
在Pixhawk配置完成并且超声波避障定高模块数据正常输出后,需要设置必要的飞行模式,最基本的模式为1:Stabilize(自稳) 2:AltHold(定高) 3:Loiter(悬停),如图所示

6.实际飞行
在Pixhawk配置完以上所有步骤后,请务必重启Pixhawk飞控再次检查,以上参数是否正确配置,否则有参数未配置成功都有可能造成避障失败,切记!
在确认Pixhawk正确配置所有参数之后,首次飞行,就可以找一个带有墙壁等障碍且比较宽阔的地点实机测试,飞行常用的顺序应该是:
1)给飞行器上电,等待Pixhawk飞控蓝灯闪烁,则表示飞控已经初始化完成
2)等待Pixhawk飞控蓝灯闪烁时,即可长按安全开关,直到Pixhawk安全开关红灯常亮,则表示安全开关打开完毕
3)使用遥控解锁,飞控解锁成功后,飞行器电机会开始转动,此时缓慢推动油门,飞行器起飞后,将飞行模式设置为Loiter(悬停)模式,
4)拨动遥控第7通道(或第8通道,根据之前设置来定),开启避障功能,推动摇杆将飞行器控制向前飞行至接近墙壁障碍,飞行器会自动根据前方障碍的距离来控制速度并停止在距离障碍3米左右的位置,如果由于速度太快或者惯性作用飞行器距离障碍小于3米,飞行器会自主退回至距离障碍3米左右的位置。
7.注意事项
1)使用模块时,pixhawk不能通过USB供电,需要通过电池供电,否则USB供电时
造成飞控启动时间较长,模块数据不能正常通讯!!!
2)第一次飞行,请控制飞行器在较低的速度下飞行,以免操作不当造成撞机。
3)在Pixhawk飞控AltHold(定高)模式下,飞机的反应和悬停模式不一样,飞机遇到障碍物时,倾斜的角度会和遥控的pitch和roll进行融合,再做最后反应,所以在全速前进时,可能会出现来不及刹车!悬停模式下,飞机在遇到障碍物时,会停止前进,不管遥控器前进的pitch和roll有多大,因此,水平避障功能需要在悬停模式下进行。
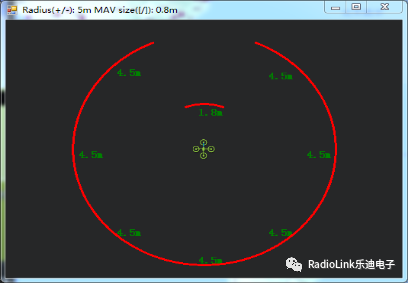
4)模块可以实现水平8个方向的避障,需要通过模块的按键来改变模块的方向。模块默认的方向是向前,当每按一次按键,模块的方向顺时针改变一次,并且模块的灯会闪烁相应的次数,提示当前模块的方向,并且永远保存该反向作为模块的方向,用户还可以通过地面站的数据查看当前模块是哪个方向。如下图
当前为方向向右的模块
1)模块在检测距离时,检测到物体时,模块的灯会常亮;如果障碍物距离较远,模块检测不到时,模块的灯会不断闪烁,提示不能检测到物体。
2)连接成功好,模块在上电时会闪烁几次,再熄灭,初始化完成时再常亮。
3)安装飞控时,应防止桨叶、机架对信号的干扰。
4)由于模块时收发一体的模块,因此有40cm的盲区,但在小于40cm时,默认为
40cm
5)数据查看只能查看水平方向的距离,当没有距离显示时,可能模块的当前方向向
上,需要通过日志才能查看向上的方向。
功能二:向上防撞
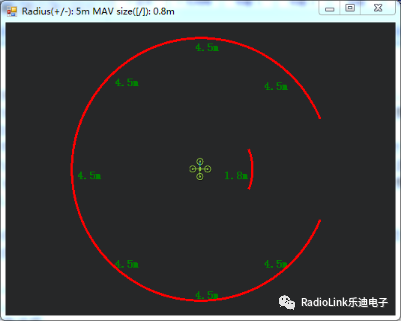
向上防撞和避障功能一致,但需要通过按键来设置模块的方向为向上。当当前为向前时,按一次按键,模块的灯快闪几次,并且通过地面查看的数据如下图时:
说明当前模块为向上防撞。
对应的防撞距离可以前面的方法设置AVOID_MARGIN(防撞距离)的值即可。
功能三;定高功能
1.安装说明
用4pin的线一端连接pixhawk的I2C口,另一端连接模块,如下图所示:

模块朝下面方向安装
2.配置说明
进入-初始设置界面,点击左侧可选硬件,再点击声呐,在右侧会出现声呐界面。在右侧的选框中,点击下拉,选中“MaxbotixI2C”或者“LightWareI2C”,如下图所示:
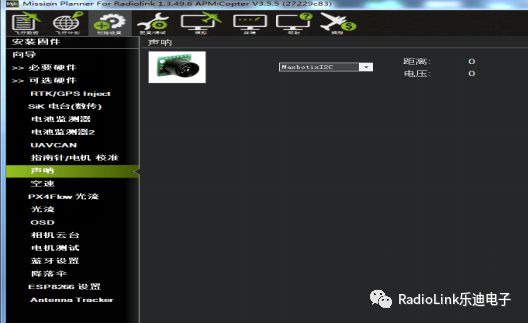
不需要保存,重启飞控后,再回到这个界面,会出现模块的距离时,代表设置成功
RNGFND_MAX_CM设置为450,RNGFND_MIN_CM设置为40(单位:cm)
RNGFND_MAX_CM是飞控在定高模式下能识别模块的最大距离
RNGFND_MIN_CM是飞控在定高模式下能识别模块的最小距离
当模块发送的距离超过40~450cm时,飞控不识别模块的距离,通过气压计的距离来进行定高
相关资讯
更多- 慧明捷资讯|慧明捷全程护航“畅通胶东·2026应急通信保障演练”
- Prime Air再拓美国城市:亚马逊无人机配送进入克利夫兰,低空物流竞争转向多城市复制
- 从爱尔兰飞向美国都市:Manna在Tulsa启动首个完整城市级无人机配送运营基地
- 重载无人机驰援雪域高原!容祺KTZ3列装云南迪庆消防,科技重塑高原救援新战力
- 迎汛而上,空中巡防丨低空遥感赋能多地防台应急
- 重大突破!宏图一号四星编队SAR攻克热带雨林监测难题 国产卫星赋能全球森林碳汇核算
- 扬帆“十五五”,开启低空经济新篇章
- 央视新闻联播聚焦深圳福田无人机AI新应用
- 国产“Lattice OS”——天枢OS | 直面“低慢小”蜂群威胁,以群反群重塑低空防御体系
- 云卓科技|以科技启迪成长,以责任守护未来