F-OP300倾斜模块上线——支持免像控倾斜模式
转载 2019-03-21 09:38 飞马机器人 来源:飞马机器人F-OP300倾斜模块采用独特的双相机倾斜设计方案,结合无人机管家智能航线设计,具备高质量的侧面纹理采集及高效率的作业能力;其具备的逐相机打标和同步曝光能力,可有效的解决相机快门延时误差,获取每个相机的准确曝光位置信息;配合无人机管家数据处理模块,可支持“高精度免像控倾斜摄影”作业模式,为1:500免像控三维测图提供完整的软、硬件解决方案,支持F200、F300机型使用。
一、载荷参数
载荷名称:F-OP300
相机型号:SONY A6000
传感器尺寸:23.4*15.6mm
有效像素:4800万(6000*4000*2)
镜头参数:35mm定焦
采集分辨率:优于2cm

二、方案特点
(1)定制化镜头
F-OP300倾斜模块相机镜头采用索尼定制35mm定焦镜头,镜头为缺省无穷远对焦模式,减少相机设置难度,有效的提高了对焦稳定性及影像采集质量。
(2)往返航线设计
无人机管家中智航线中支持全自动的倾斜航线生成;规划或导入区块只需填写所需分辨率及重叠度即可自动生成航线,具备自动划分架次等功能。
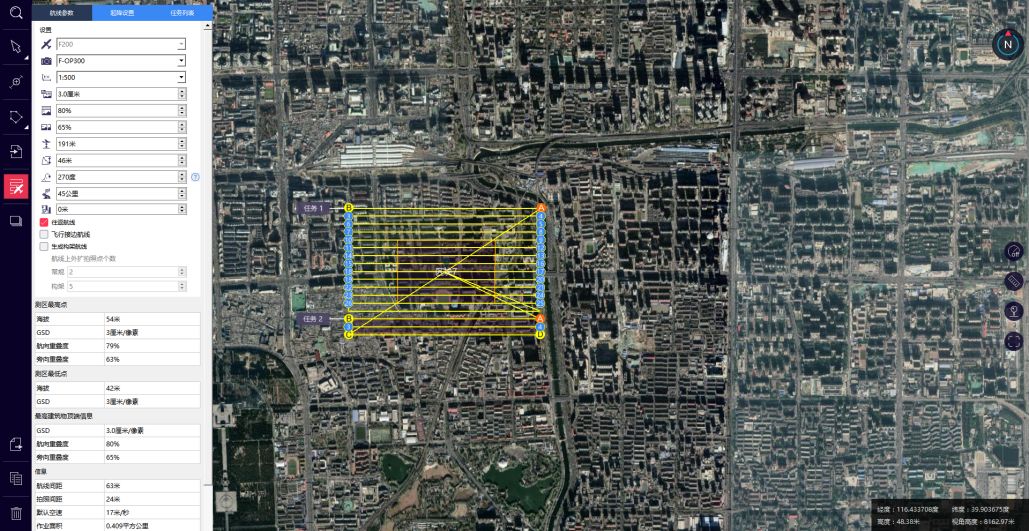
航线设计图
F-OP300倾斜航线默认为往返航线设计,搭配独特的双相机角度设计,单架次航线即可获取覆盖区域4方向侧面纹理;同时,针对纹理要求不高的任务,选择非往返设计即可建模,可以提高一倍的数据获取能力。
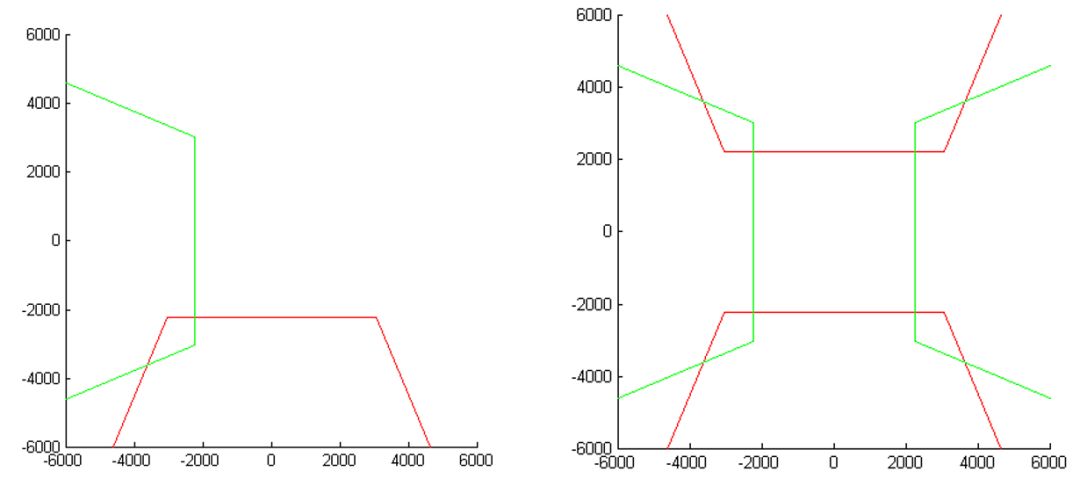
双相机往返设计示意图
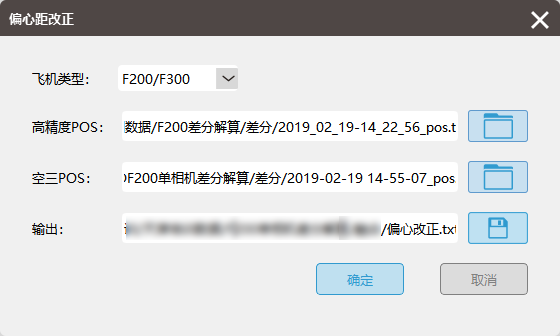
(3)偏心距改正
F200、F300机型可精确获取GPS天线和相机之间的安置参数,经偏心改正处理后,可获取每个相机的精确曝光位置,为免像控高精度作业提供保障。
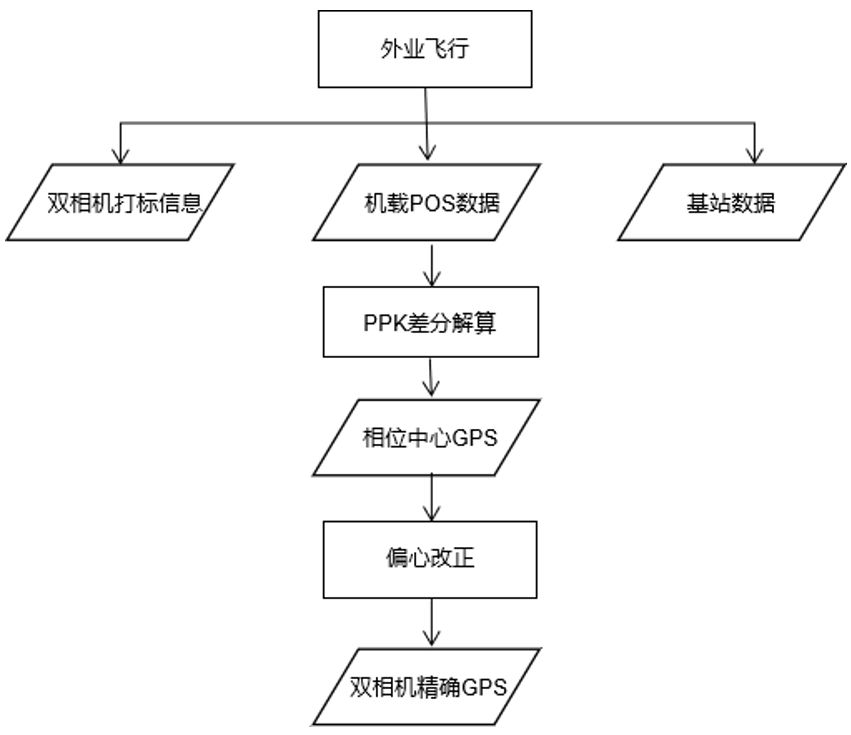
偏心改正处理流程
(4)作业效率
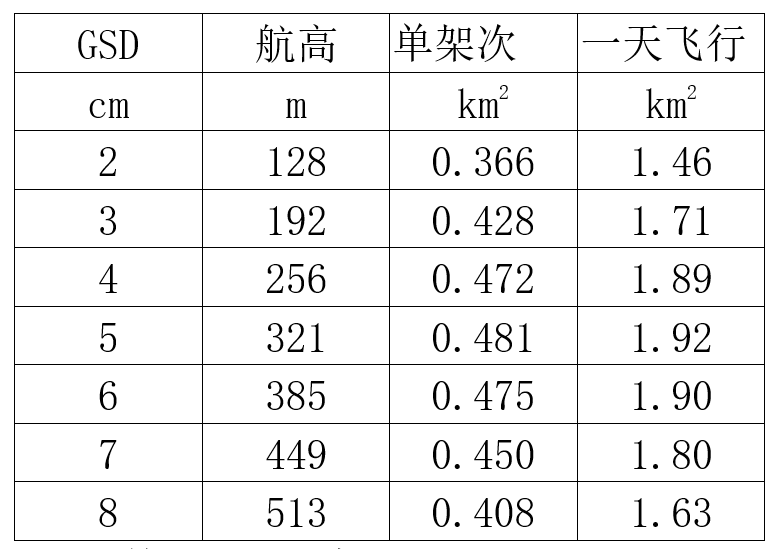
注:按照1天飞行4架次,单架次60km航程限制,80%×65%重叠度、往返航线统计。
三、1:500免像控倾斜应用案例
(1)测区概况
为验证F200搭载F-OP300倾斜模块免像控能力,2019年2月19日在天津宝坻检校场获取一组数据,飞行高度195cm,地面分辨率为2.5cm,航向重叠率80%,旁向重叠率65%,此次飞行共获取0.7km²数据。

航线设计
(2)外场作业流程
在空旷处架设飞马标配基站,连接千寻CORS采集基站点坐标并记录静态数据。F200采用手抛式起飞,按照预定航线进行数据获取。

手抛F200
(3)数据处理流程
此次飞行获取数据包括影像数据、飞机GPS观测数据和基站静态数据,利用无人机管家“智理图”模块进行差分解算,获得高精度天线相位中心GPS数据。
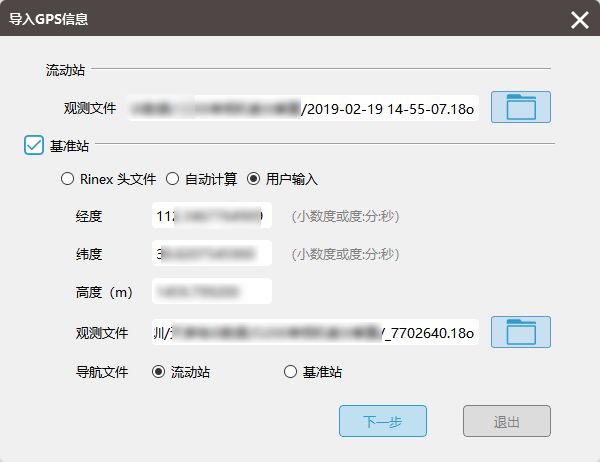
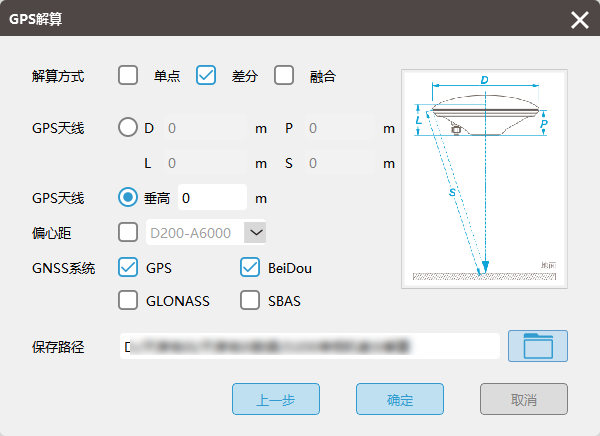
GPS差分解算
根据飞机安置角度、飞行姿态信息及打标时间进行偏心改正,获得各个相机准确曝光点位置,用于后期基于高精度GPS的空三平差处理。
在“智拼图”模块导入影像和偏心改正后GPS,采用空三+PPK进行空三计算。
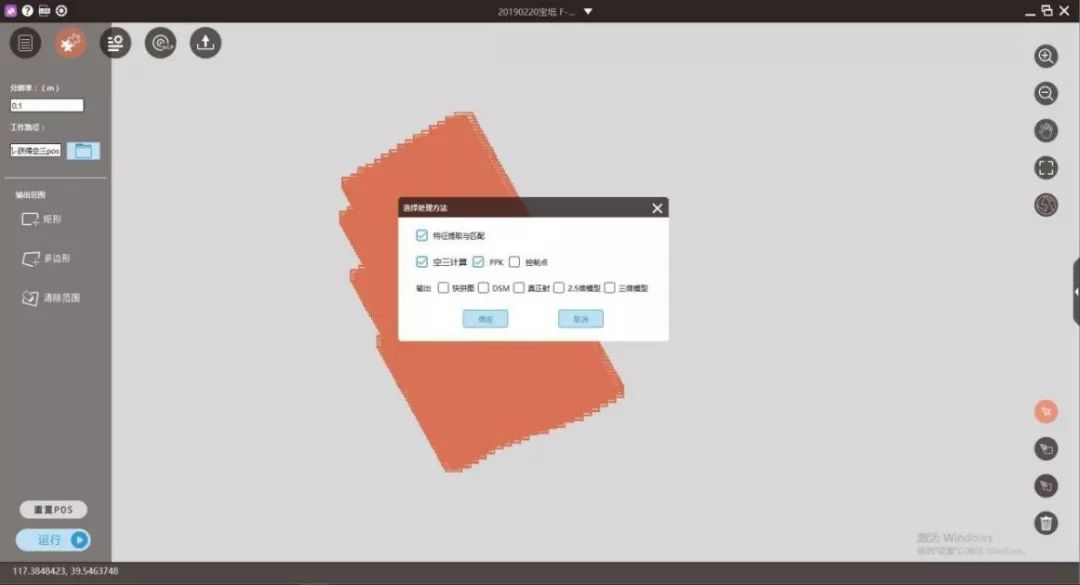
基于高精度GPS空三平差
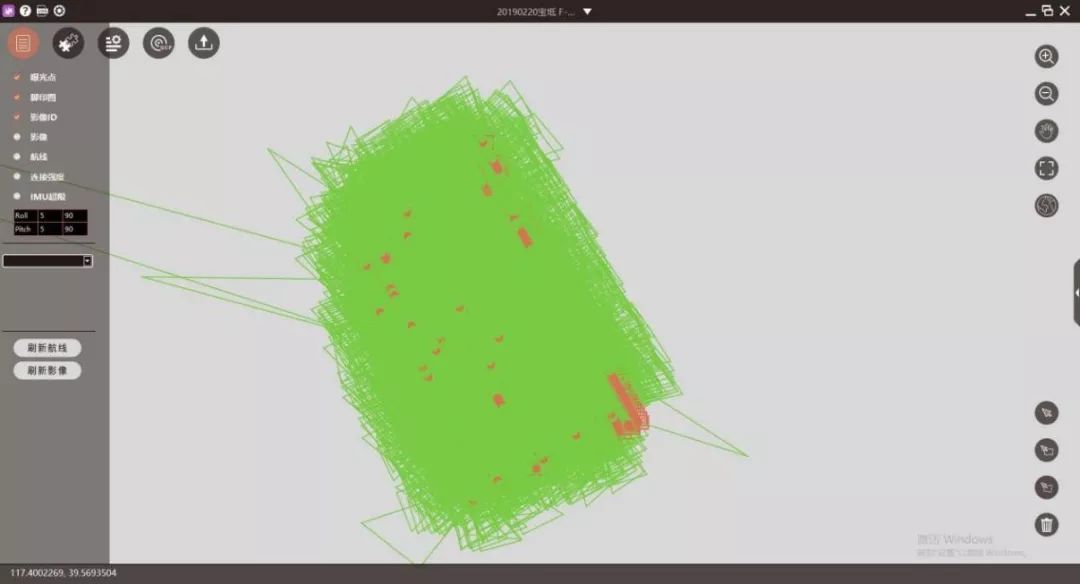
空三结果
将无人机管家空三结果导入CC进行刺点,并将所有点都设为检查点,查看预测点位(绿色)与实际点位误差,均在2-3个像素。
刺点完成可在CC进行空三平差,检查无控模式下的精度情况。由空三报告可知检查点平面中误差为2.6cm,高程中误差为7.46cm。

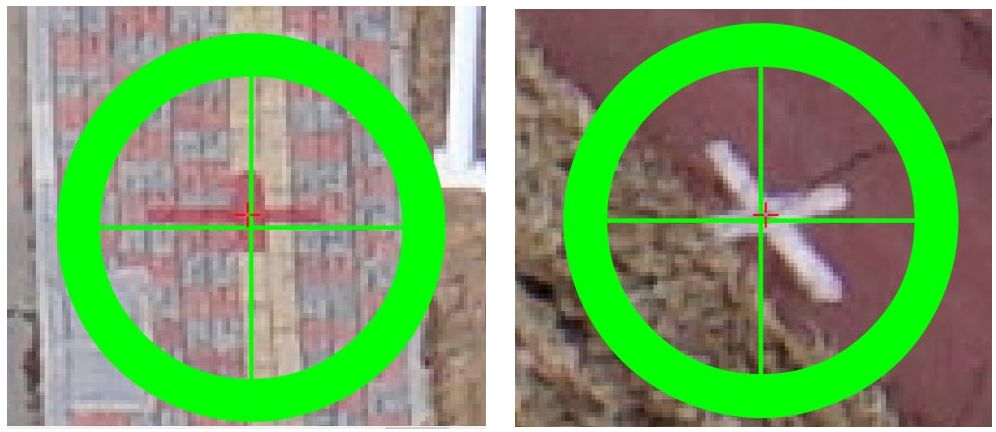
预测点位误差
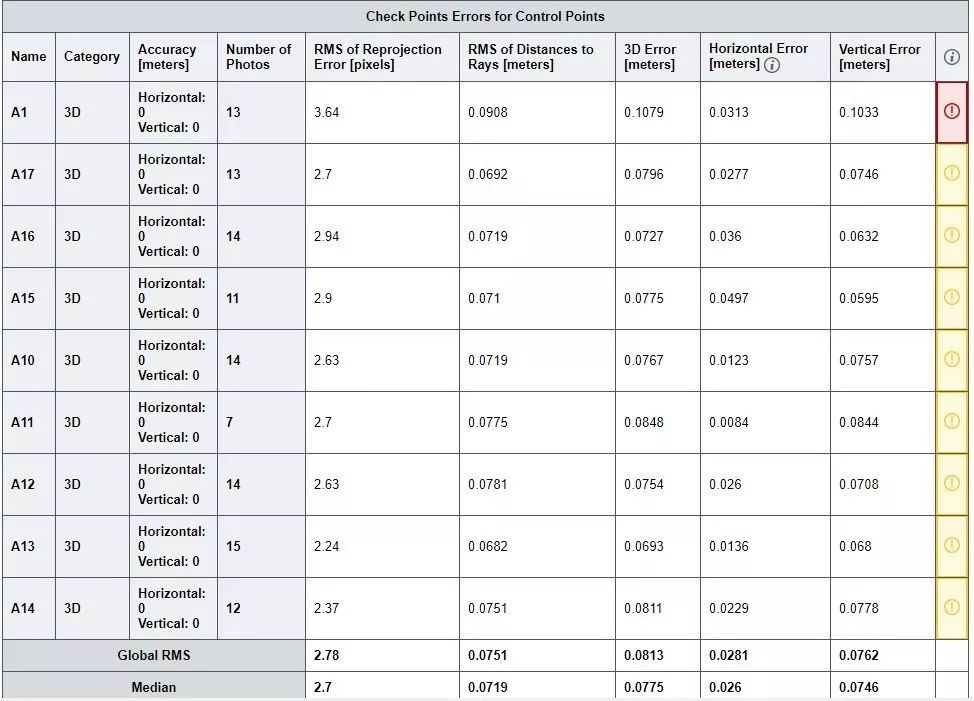
CC空三精度报告
(4)模型效果
基于无控空三成果进行三维模型重建,模型效果如下:

模型整体图

模型局部图

模型细节图
(5)三维成果精度
采用检查点检核三维模型精度,经统计,三维模型的检查点平面中误差为5.5cm,高程中误差为7.7cm。
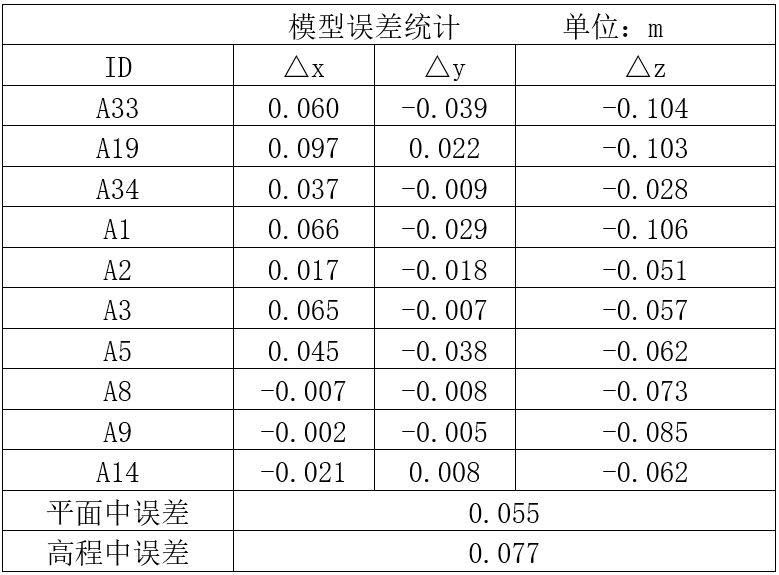
三维模型误差报告
由此可知,F200搭载F-OP300倾斜模块的三维测图解决方案可以满足航测1:500地形测图精度要求。该方案可大大减少了外业布控工作量,提高作业效率,适用于大面积高精度三维建模等工程项目。
相关资讯
更多- 气象服务新范式 赋能千行百业 | 中科星图“看天・预见未来气象服务产品发布会”成功举办
- 锁定「看见三亚」:千机科技邀全球品牌共舞海南夜空,独享亿级流量入口
- 民航局就限用类无人机及动力提升航空器适航标准公开征求意见
- 预告:66架电动飞机已下单,即将空降您身边的飞行主题乐园
- 全国首个!云圣智能低空大模型完成双备案,“AI+低空”赋能新场景
- 全国首个低空共享无人机示范区飞行架次首破10万
- 地面机器人尽管受到欢迎,但乌克兰利用其执行任务不到其无人机总任务量的1%
- 世界最小的可编程、全自主机器人在美问世
- Sunflower Labs 获1600万美元B轮融资,致力把无人机安防从概念推向规模化落地
- Packet Digital获得美国防部5000万美元锂电订单