科普 | 无人机飞控系统
转载 2019-12-16 21:54 吴中健 来源: 华广机协无人机飞控系统
最近几年以来无人机的热度一直有增无减,而一直引领这一行业发展的就是我国的大疆公司

大疆之所以能引领行业我觉得最大的因素是其率先开发出简单实用的飞控系统。
在还没飞控系统的时候,无人机、航模等都是很难操控的,只能在视觉范围内控制。其遥控实现机动、机态的调整都需要飞手通过视觉的感知再去进行控制。这样的操作注定没法大众普及。直到研发出的飞控系统。才使无人机成为面向消费级的产品。可以说飞控技术的发展是无人机得以快速发展壮大的最大推手。

现在,我们就来简单介绍一下飞行控制系统
飞行控制系统简称飞控,是飞行器的大脑,多轴飞行器的飞行、悬停,姿态变化等等都是由多种传感器将飞行器本身的姿态数据传回飞控,再由飞控通过运算和判断下达指令,由执行机构完成动作和飞行姿态调整。
无人机飞控系统的组成:
IMU惯性测量单元
IMU惯性测量单元是由三轴陀螺仪、三轴加速计、三轴地磁传感器和气压计构成的。

三轴指的就是飞机的左右、前后和垂直方向的上下,在飞机上分别对应横滚、俯仰和Z轴。
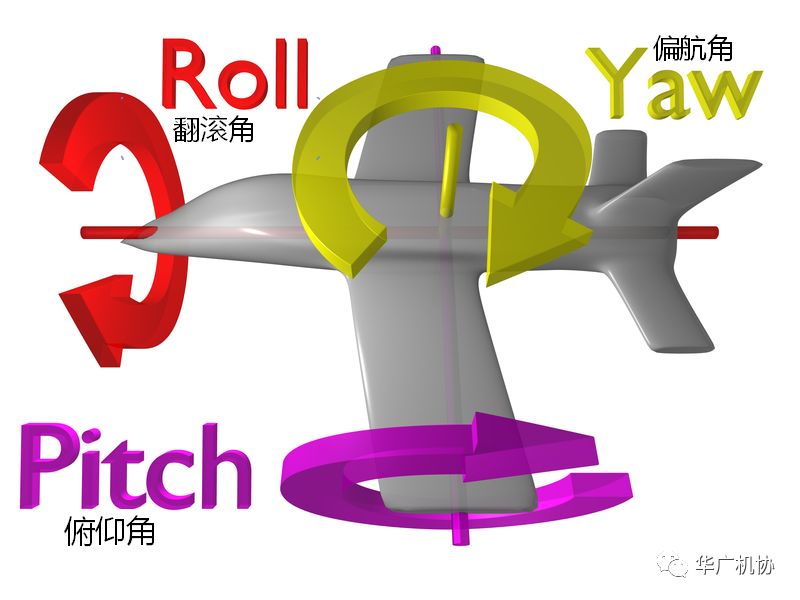
三轴陀螺仪通过三个轴上的传感器计算外部框架旋转的度数等数据,现在一般用电子陀螺仪代替机械陀螺仪。
三轴加速度计是测量飞机XYZ三个轴的加速度;地磁传感器就是感知地磁,就是一个电子指南针,可以让飞机知道自己的飞行朝向、机头朝向、目的位置和原位置。
气压计用于测量不同位置,计算压差获得当前的高度。
GPS定位:确定飞行器的位置、目的位置、原位置当前速度和加速度等,并且可和气压计、空速计一同工作,消除误差等
空速传感器:分为两路测量气压的传感器,一路测量静止气压,一路测量迎风气压,利用差值计算当前的空气流速等


这几个元件综合作用感知飞机的姿态变化数据。由于飞行器本身的不稳定和环境的多变,要实现稳定悬停和飞行,就需要获得飞行器的15个状态,比如:三维位置、三维速度、三维加速度、三轴角度、三轴角速度等等,并进行一系列“串级控制”,即把这些数据传输给飞控内部的单片机,单片机负责运算,根据飞机的当前数据,计算出相应的补偿方向、补偿角,再把这些补偿数据传输给电机,由电机去执行,完成补偿动作。

由于环境的多变,大部分的飞控需要几乎每时每刻都在对飞行器进行微调,大概一秒刷新十次,即进行十次微调,才能做到最简单的稳定悬停。
就不用再说那些更高难度的翻滚运动、俯仰运动、偏航运动等等了。
地面站:飞手、遥控器、显示屏等
这就是飞控的最基本的功能,如果没有飞控系统,就需要人为视觉去看飞行器的运动状态,一旦其中一个角发生倾斜,那么飞行器就会快速失去平衡,而发生坠机“炸机”。

相关资讯
更多- 首届中国低空融媒大会圆满落幕:共筑新基建,开启低空视觉艺术与融媒发展新篇章
- 从概念落地成为实景!无人机应用场景“多点开花” 低空经济激活千亿市场
- 大漠大邀您共赴 CES 2026 | 和千架无人机共同点亮拉斯维加斯夜空
- 从空中8K全景到水下巡检:CES 2026 无人机创新指向“空水一体”的立体感知网络
- 教育观察④ | AI时代校本课程突围:从“百花齐放”到“三重融合”的体系重构
- 2025企业家博鳌论坛:无人机表演演绎“十五五”新机遇,千机科技携手新华社共绘低空经济蓝图!
- AOPA航拍应用技术课程十二月开班通告
- 火热报名!东莞无人机驾驶员(3-5级)职业技能等级证书,享补贴
- 教育观察③ | “新课标”引领课程转型:科技兴趣班从 “育分” 到 “育人” 的破局之路
- 教育观察② | “馆校协同”打通育人边界,凝聚育人合力