想和LiDAR工程师好好聊天?这些“江湖行话”你必须知道!
转载 2020-05-13 21:04 Olivia 来源:成都纵横自动化
“大家都说激光点云精度高,但仅仅靠点云数据,很多地物细节信息,我们也看不出来。”
“激光雷达很多参数指标,射程、多回波、惯导精度、数据精度,怎么判断哪个设备符合要求?”

激光雷达作为近年来的“网红”机载设备,在无人机界一度引发了激烈讨论。可是,很多客户在交流中发现,一些工程师口中的专业词汇,经常听得一脸懵。因此,小编为大家准备了激光雷达行话宝典,干货满满!下一次,再遇上激光雷达工程师,你们也能好好聊天了!
LiDAR
激光雷达是LightDetection and Ranging的缩写,是激光探测及测距的简称,它是一种激光器作为辐射源的雷达,是激光技术与雷达技术相结合的产物。
与雷达(Radar)的区别:Radar一词是英文“Radio Detection & Ranging”的缩写,它与激光雷达的区别是其能量源不同。就像其名字所表明的一样,雷达是一种使用无线电作为其能量源的传感器,主要用于探测目标物体是否存在并确定其距离,有时也要确定目标的角度位置。
GNSS
全球卫星导航系统,利用一组卫星的伪距、星历、卫星发射时间等观测量,以及用户钟差来进行定位。全球卫星导航系统是能在地球表面或近地空间的任何地点为用户提供全天候的3维坐标和速度以及时间信息的空基无线电导航定位系统。IMU惯性导航装置,是测量物体三轴姿态角及加速度的装置,分为光纤IMU和MEMS IMU。
光纤IMU和MEMS IMU之间的差别:目前市面上出现越来越多的标称精度较高的MEMS IMU,但是MEMS的IMU的精度更容易受震动的影响,对于无人机这种空中震动较强的飞行器,MEMS IMU的稳定性会差于光纤IMU。
相机
激光雷达系统中标配的相机,根据激光雷达本身的参数要求,一般包括全画幅相机和半画幅相机。PRR激光脉冲发射频率,意味着每秒的脉冲发送个数,是脉冲雷达信号最重要的特征参数之一。发射频率是发射脉冲或脉冲组的速率。通常来讲,发射频率就是每秒发射脉冲的数量,用赫兹(Hz)表示。
需要注意的是,由于雷达的工作频率也是用赫兹计量,所以不要将激光脉冲发射频率与雷达的工作
频率相混淆,两者是完全不同的雷达信号特征参数。
POS
高精度位置与姿态测量系统,是IMU/DGNSS组合的高精度位置与姿态测量系统(position and orientation system, POS),利用装在飞机上的GNSS接收机和设在地面上的一个或多个基站上的GNSS接收机同步而连续地观测卫星信号,精密定位主要采用差分GNSS定位(DGNSS)技术,而姿态测量主要是利用惯性测量装置(IMU)来感测飞机或其他载体的加速度,经过积分运算,获取载体的速度和姿态等信息。
CORS
连续运行参考站,可以定义为一个或若干个固定的、连续运行的 GNSS 参考站,利用现代计算机、数据通信和互联网(LAN/WAN)技术组成的网络,实时的通过 GSM/GPRS 无线电话或互联网向不同类型、不同需求、不同层次的用户自动地提供经过检验的不同类型的GPS观测值( 载波相位,伪距),各种改正数、状态信息、以及其它有关 GNSS 服务项目的系统。
PPK
事后处理动态相对定位技术,是利用载波相位进行事后差分的GNSS定位技术,其系统也是由基准站和流动站组成。
为什么需要PPK:实时POS解算需要稳定的通信链路,一旦链路不稳定则定位精度不可靠,并且实时POS是瞬时定位的结果,可依赖的先验信息并不多,整体精度会远远差于事后处理。
点云
扫描资料以点的形式记录,每一个点包含有三维坐标,有些可能含有颜色信息(RGB)或反射强度信息(Intensity)。
全域免像控
作业范围不受测区大小限制,不受RTK 作用范围限制,不受飞机与引导站通信范围限制,不受飞机与引导站距离限制,不受作业区域移动通信或网络通信限制。同时,精度不受测区大小限制
JoLiDAR点云处理软件
是由JOUAV公司开发的集成激光雷达数据采集和数据处理软件,包括设备操控,一键数据预处理、快速点云生成、显控编辑、校准、坐标转换、精度评估、点云分类、影像PPK等功能。
01
点云精度与点密度
有关系吗?
没有直接关系。点云精度通常指的是点云数据坐标与实地测量点坐标偏差,点云密度通常指每平方米所有的点云总数。有可能误认为点越稀,点云精度越差。
02
激光扫描仪的线数与点密度
有关系吗?
没有直接关系。与点密度有关的是laser的发射频率,频率越高,点密度越高。当然还跟飞行平台的速度和对地高度有关,同样发射频率下,速度越快点越稀、对地高度越高点越稀。
03
激光扫描仪的线数与精度
有关系吗?
激光扫描仪并非线数越多越好,长距测量型laser一般都是单线的,多线激光因为存在多线之间的匹配误差,导致精度远远低于单线雷达。

DSM
数字地表模型,是指包含了地表建筑物、桥梁和树木等高度的地表模型。激光雷达数码航摄系统快速获取激光点云数据,直接得到测区数字表面模型。数字表面模型可用于电力选线、高速公路设计,辅助设计者提取相关信息。

DEM
数字高程模型,是通过有限的地形高程数据实现对地面地形的数字化模拟。原始激光点云数据经过计算机程序自动提取地面点云数据,快速生成数字高程模型。数字高程模型作为工程施工最基础的资料,广泛用于各个工程领域。

DOM
数字正射影像图,高分辨率数码影像配合激光点云数据快速生成真正意义上的高精度数字正射影像图,广泛应用于各个工程领域。

DLG
数字线划地图,利用激光点云和正射影像提取地物要素及其等高线得到的数字线划图,是现有地形图上基础地理要素分层存储的矢量数据集。

TDOM
真正射影像图,获取激光点云的同时获取目标区域真正射影像,在正射影像图上房屋等高出地表的构筑物都不会出现倾斜现象,可用于小比例尺制图。


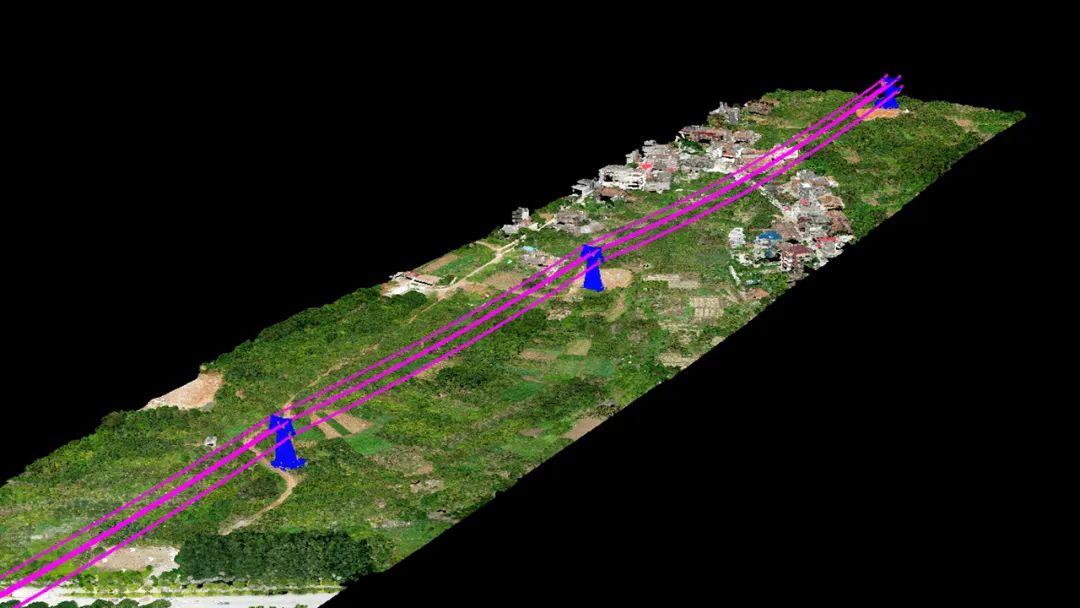
通道三维重构
通过无人机获取电力杆塔的航拍影像和激光雷达点云,实现电力线路走廊与电力设施的三维重建。
无人机精细化自动巡检
无人机搭载激光雷达和相机,快速获取高精度杆塔点云数据和正射影像,为多旋翼自动驾驶提供精准导航数据。
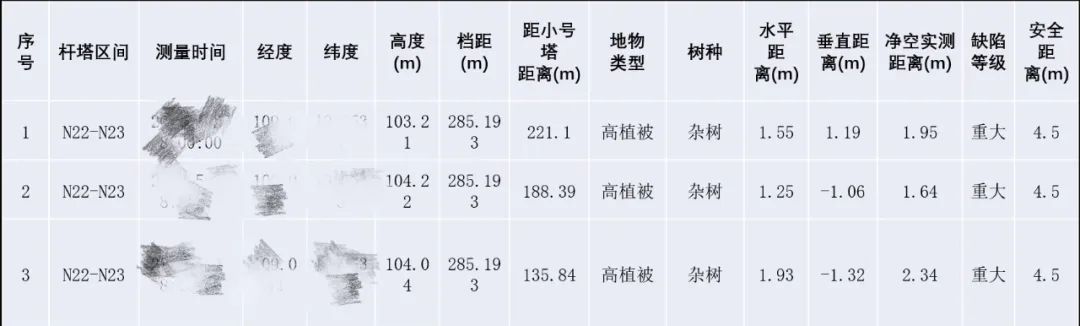
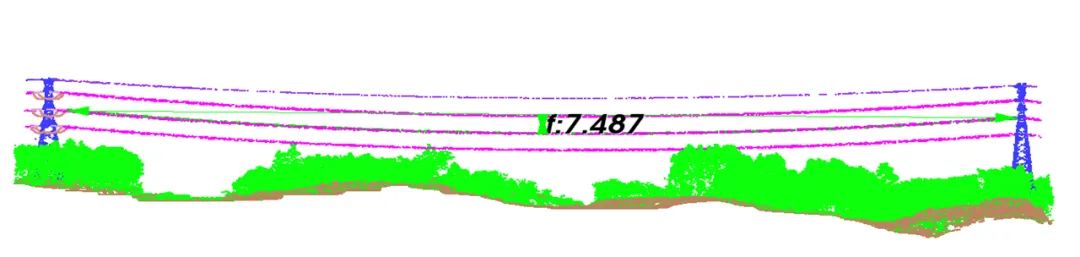
快速三维测量
客户使用无人机机载激光雷达系统快速对导线信息进行三维测量。
堆体土方测量
客户使用无人机机载激光雷达对土方量进行测量。

“实践是检验真理的唯一标准”,说了这么多,还不赶快找个激光雷达工程师好好聊聊?
相关资讯
更多- 加速协同创新,蜂巢航宇加入长三角产教融合共同体
- 技术破局,智护危化|鲲鹏智汇亮相大湾区交流会,分享硬核解决方案
- 一网统飞找灵犀,灵犀智联低空区|卓翼智能低空政务一网统飞解决方案,赋能数字政务新范式
- 光谷商学院首期“卓越班”学员莅临普宙科技参观考察
- 喜报!甘肃陇原云图在2026数字中国创新大赛中斩获双奖
- 【精飞集团】郴州市政府考察团调研精飞集团 共绘低空经济发展蓝图
- 4月28日,智航华强北全球招商启动!
- 展会回顾 | 昊舜视讯亮相2026全球无人机&无人机系统产业博览会
- “打造全国首个无人机理赔示范区”工作协调推进会在普宙科技召开
- 星逻智能亮相2026江苏光伏创新发展大会,荣获“卓越智能运维企业”奖