案例 | mdLiDAR3000LR 方案应用于贵州省某河道测量项目
转载 2020-10-13 13:20 镁科众思市场部 来源: Microdrones






| 项目要求 | |
| 技术 | 机载激光雷达 |
| 可交付成果 | 三维点云 |
| 精度 σ(Z/高程) | 10 厘米 |
| 数据收集时间 | 1 天内 |
| 坐标参考框架 | CTRF 2000 |
| 投影坐标系 | CGCS2000 CM108E |
| 高程基准 | 椭球高/大地高 |



高度设置:300 米
为达到预期表面反射率设置的最大高度在该飞行高度上可获得最大点云密度兼顾效率的高度规划 速度:7 米/秒飞行速度直接决定了点云密度
视角:100每个航带所能覆盖的最大区域
重叠度:40%可能存在的不规则地形
城市区域的建筑物
各种材料反射率参照表
目标 — GCP/检查点:6个
现场在已知控制点上进行架设基站,采集静态GNSS数据
采用RTK打点的方式采集检核点,共计6个,建议使用靶标,如无,可以采集特征点
GPS设备采用徕卡GS18 RTK

飞行方向:跟随河道带状飞行
带状飞行可以显著提高飞行效率(省电)
跟随河道有助于更好的采集河道信息





系统:mdLiDAR3000LR
高度:300 米
速度:7 米/秒
使用导入DSM 进行仿地飞行
飞行方向:沿河道方向
飞行次数:1 个
地面检核点:7 个(使用徕卡GS18 RTK测得)
视角:80
重叠:40%
覆盖的区域:2000 x 200 米
飞行时间:29分钟







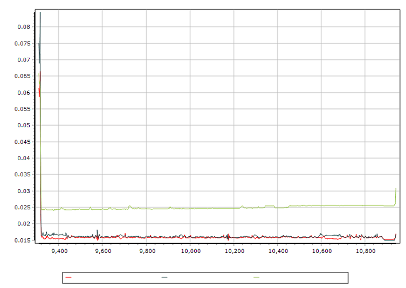
数值为零,意味着数据质量非常好
XYZ三个方向的轨迹精度都非常好
mdInfinity数据处理平台:LiDAR 地理定位和定向校准报告:





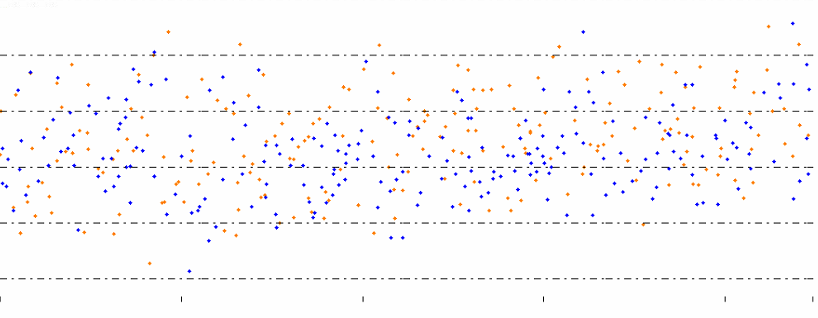
蓝色:第 6 条航带
橙色:第 7 条航带
两条航带的噪声包络线必须保持一致,必须混合两条航带,不得使一条航带高于另一条航带。在该实测项目中,Microdrones 使用了 mdLIDAR3000LR 无人机集成系统,在演示区域飞行1个架次,共扫描0.772平方公里,飞行高度300米,采集了GNSS数据,机载激光雷达原始数据,惯导数据。经过处理得到了该区域的数字三维点云,点云密度为每平方米58个点。为了正确评估测绘成果的准确度,Microdrones 采用了以下方法:使用Global Mapper 软件,导入Las 格式的数字三维点云。使用Global Mapper 软件,在点云上采集所有坐标已知的地面检查点。将点云上测量得到的检查点坐标与用户提供的已知点坐标进行比较。统计测得和已知的地面检查点的偏差,记录在表中。精度评估

项目成功!
点云成果展示测区彩色点云


测区河道




成果精度高(Z中误差,点云1mm以下);
生产效率远超传统测绘方式,一个架次即可完成,地面站式扫描仪在河道存在架站困难的问题;
mdLIDAR3000LR 方案低重叠度的特点大大提升了带状测绘的内外业效率;
单次飞行时间30分钟以上,1个架次即可完成此次项目;
对于植被茂密的中国西南地区非常适合;
mdLiDAR3000LR 方案无数据分层现象,利于带状测绘。