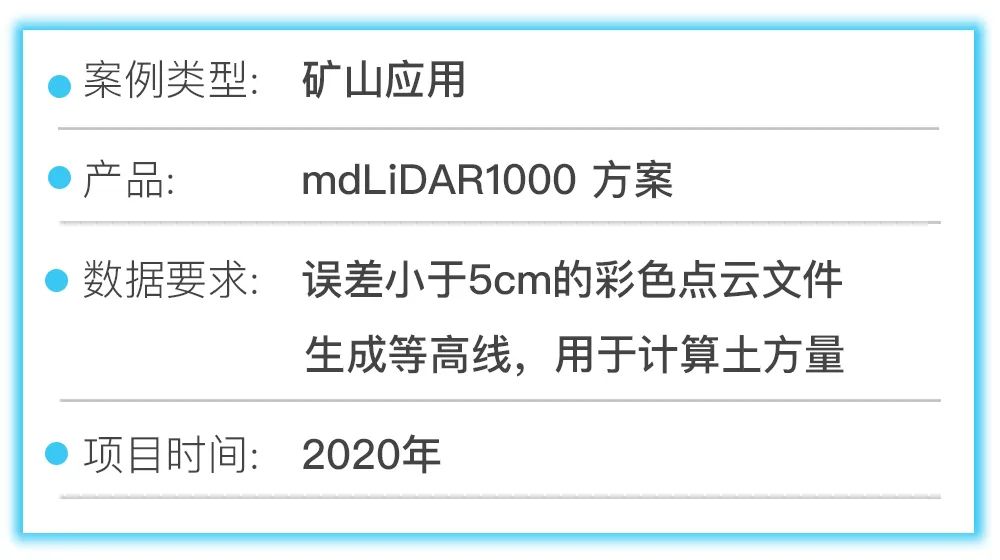
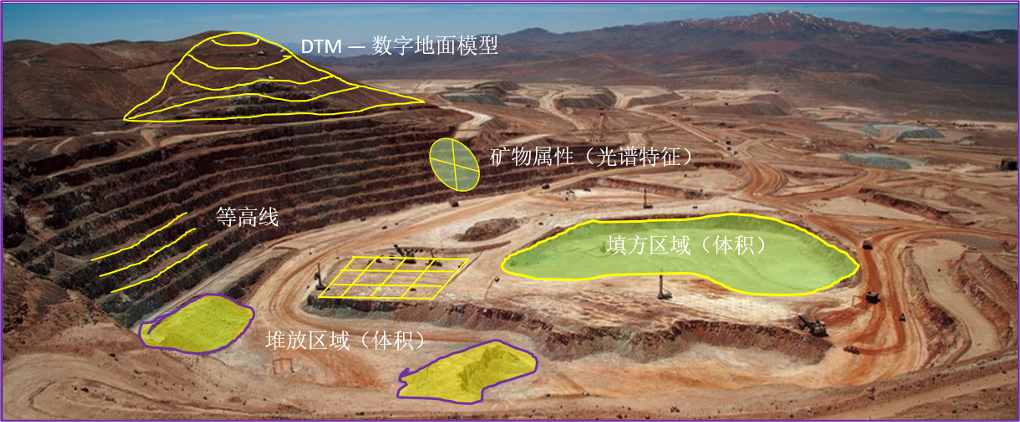
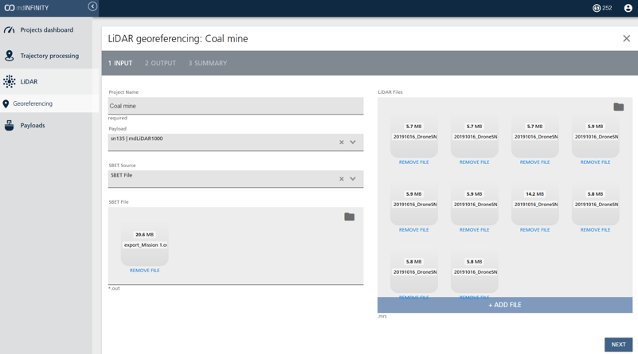
案例 | mdLiDAR1000方案应用于山西省某露天矿测量项目
转载 2020-07-31 13:41 镁科众思市场部 来源:Microdrones





可交付成果:点云
- 投影:CGCS2000 CM111E - 坐标参照系:CTRF2000 - 垂直参照系:Ellipsoidal H可交付成果:DSM 生成
- 网格 10 厘米
- GeoTiff 格式
4)工作流程在短时间内地形大量变动的区域(例如矿山或建筑工地)需要最新的DSM才能使用“仿地飞行”选项。
默认情况下,mdCockPit 软件使用全局地形模型SRTM,在地形平缓或常年不会变动的区域使用是非常方便的,但在矿山上不建议使用。
多功能
易于运输,安装于md4-1000无人机
LiDAR,最大限度减少后处理
满足项目要求的高效解决方案

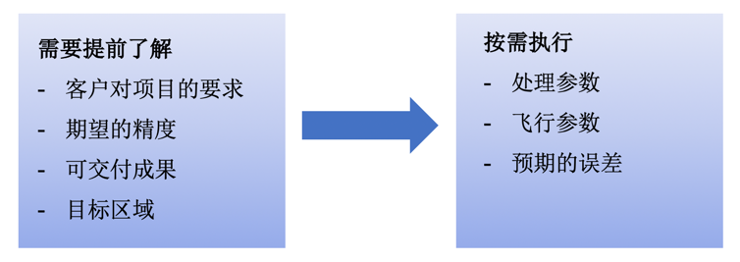
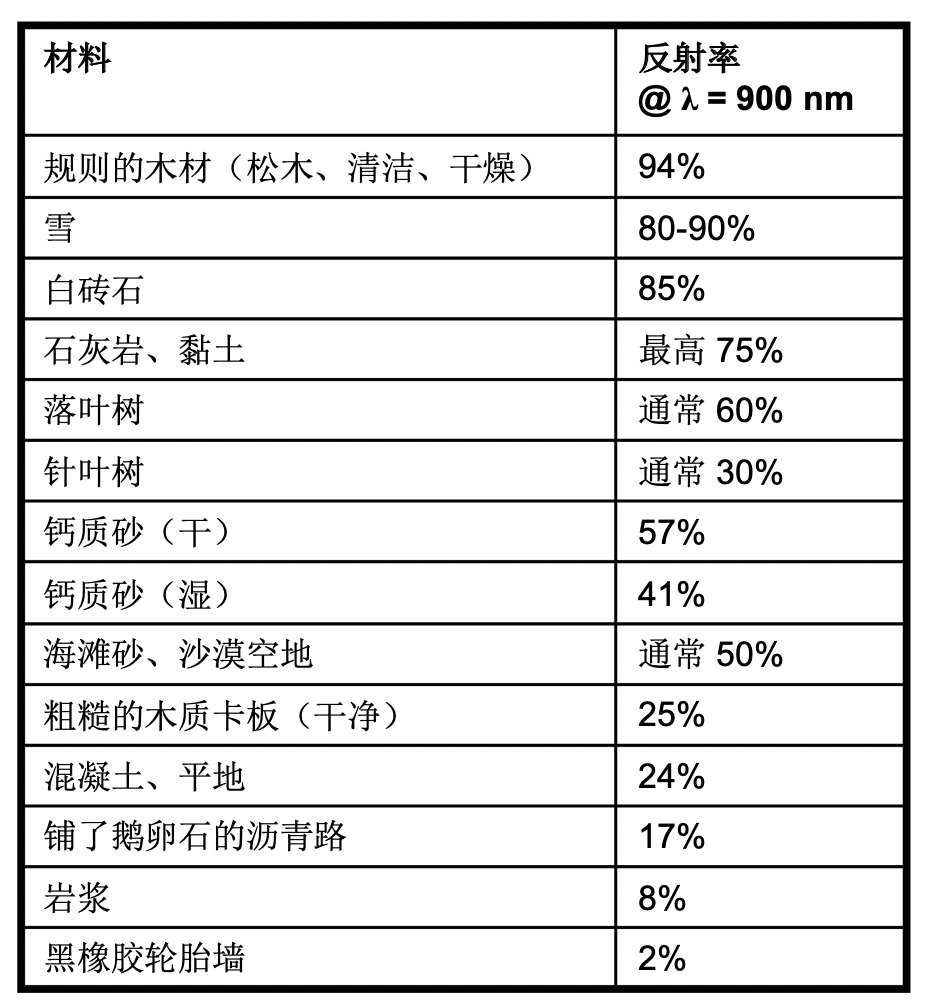
为达到预期表面反射率设置的最大高度
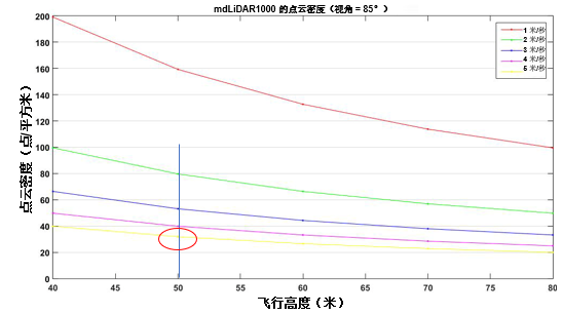
点云密度要求
效率
煤矿的反射率与新沥青相似
点云密度
视角:85°
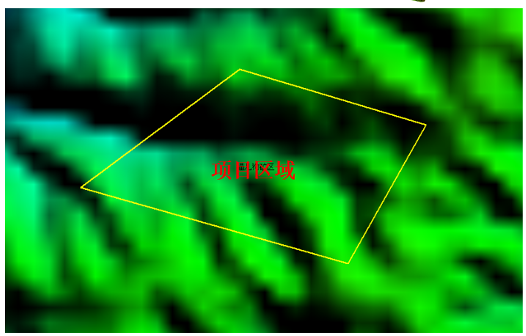
每个图像带覆盖的最大区域
重叠度:40%
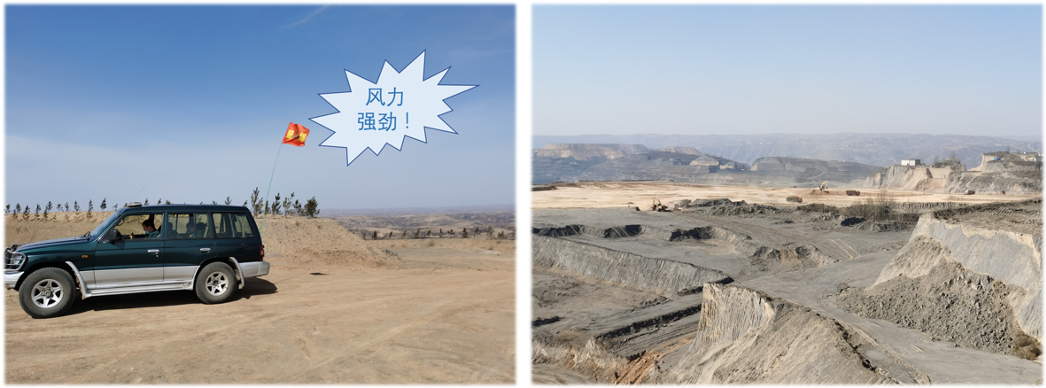
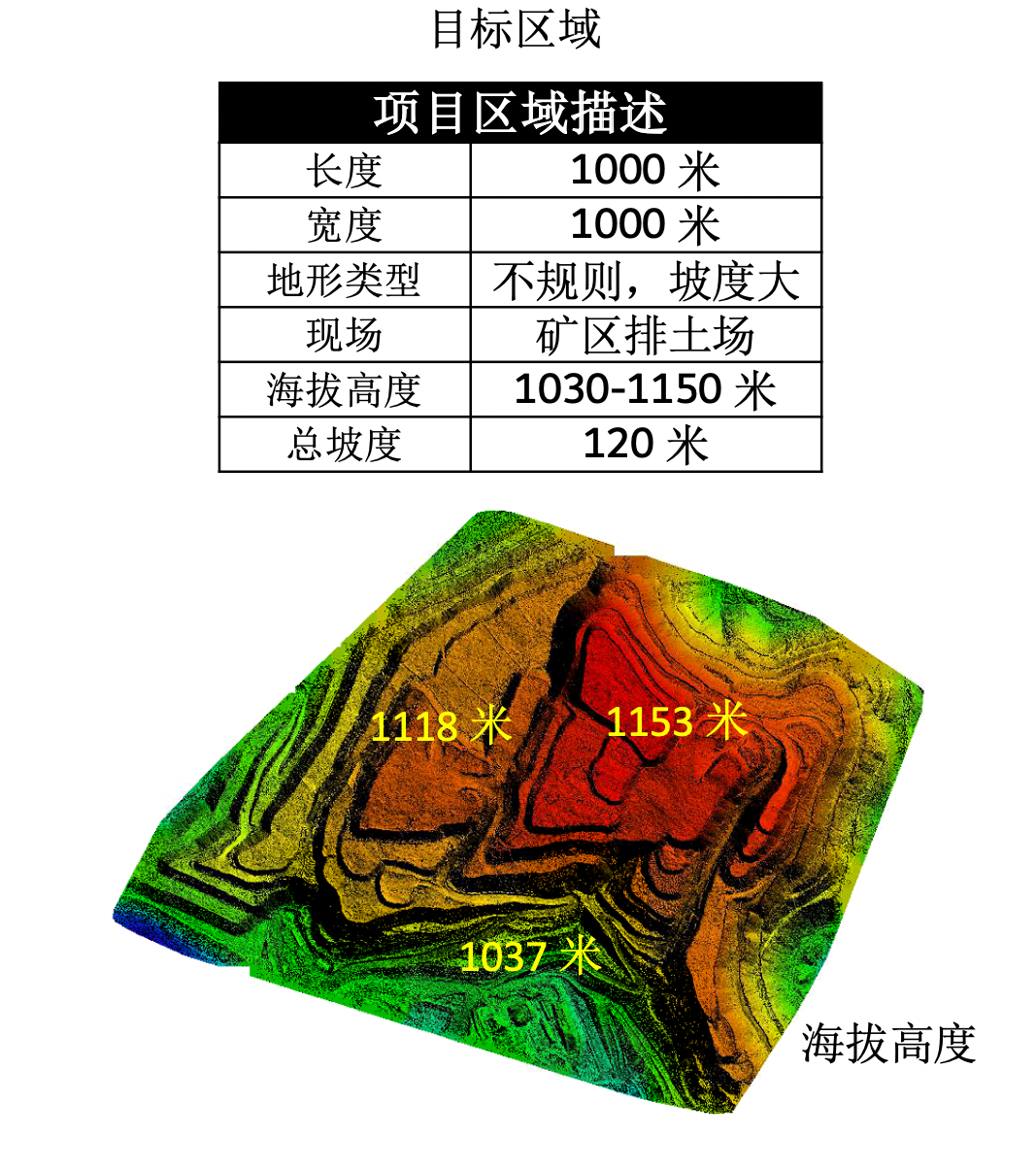
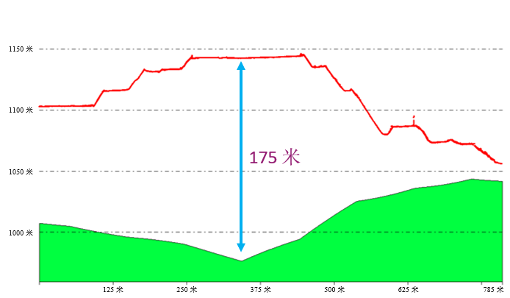
不规则地形
可能有垂直的峭壁
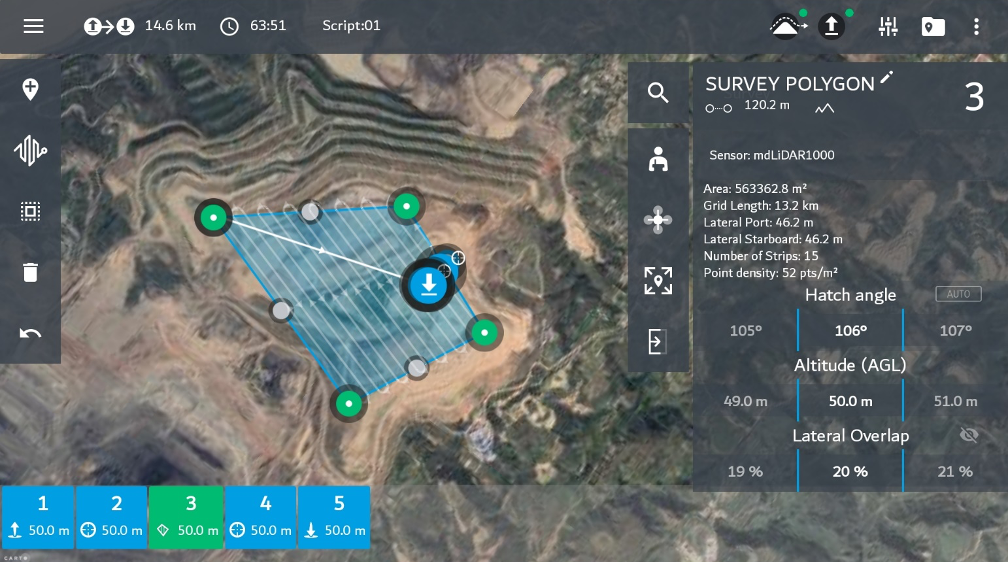
在矿场顶部设置一个 GCP
在矿场底部设置一个 GCP


飞行效率(省电)
矿场每层最大的旁向重叠


规划了 4 次飞行
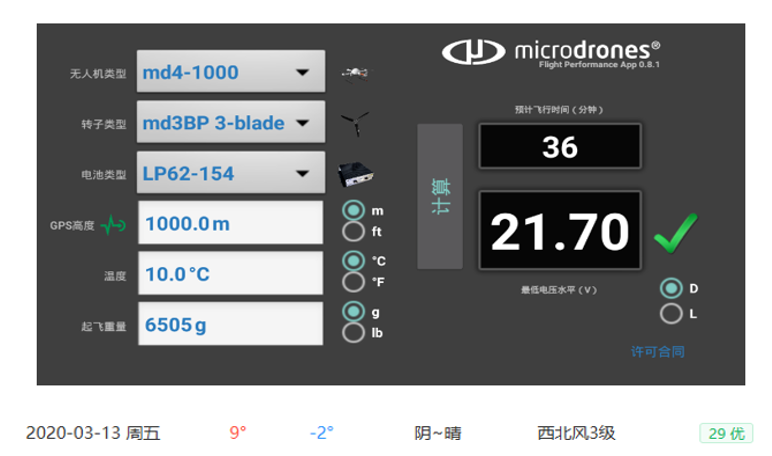
通过 mdFlight Performance App (mdFPA) 可大致了解在测区当前海拔和温度条件下,单块电池可支持的最长飞行时间;
我们规划的每次飞行时间都在预估飞行时间以内(36 分钟);
请记住,此应用程序给出的是包括无人机设备展开的整个飞行时间,无人机需要时间进行校准以及前往/返回任务的起飞地点;
飞行员需要备用电池,以防出现意外情况。
恢复航点
可一次完成整个任务规划。
一个架次结束更换电池后,可以通过“恢复航点”功能继续飞行。
这种方法的优点是系统将从上次的最后一个航点继续执行任务,确保数据是连续的。











数值为零,意味着数据质量非常好
XYZ三个方向的轨迹精度都非常好
每个架次都不存在 IMU 差距
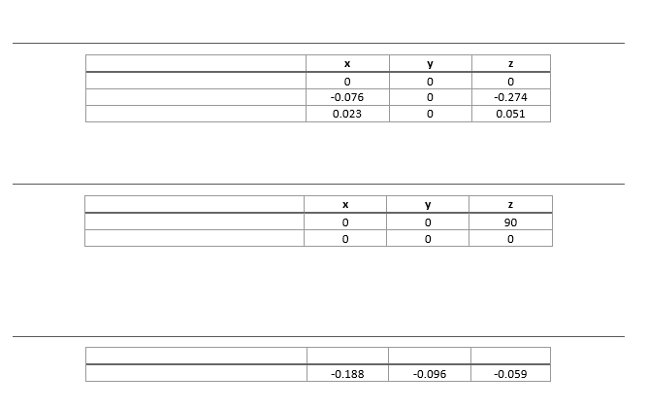
mdInfinity软件:LiDAR 定向载荷校准报告:

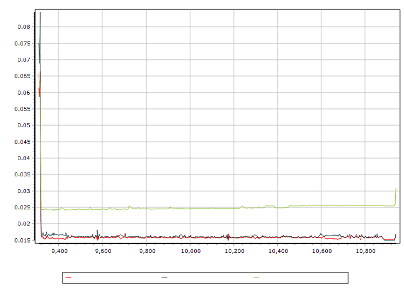
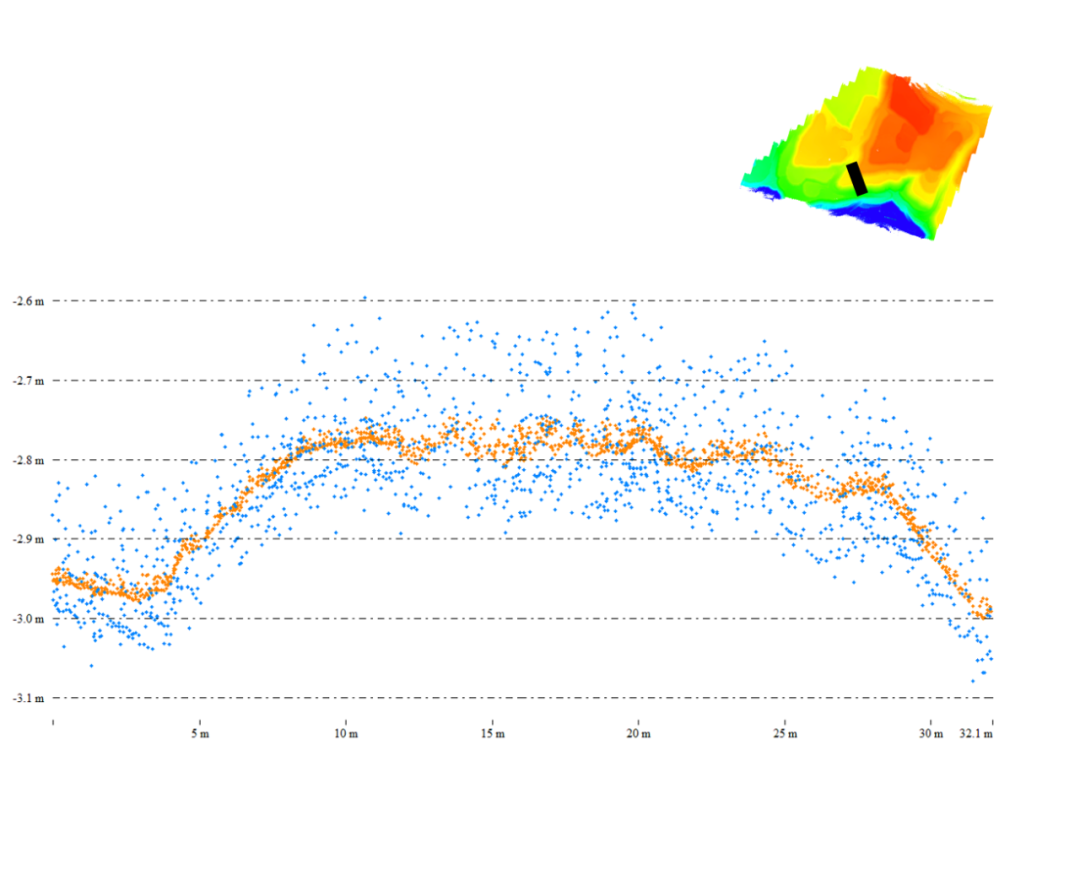
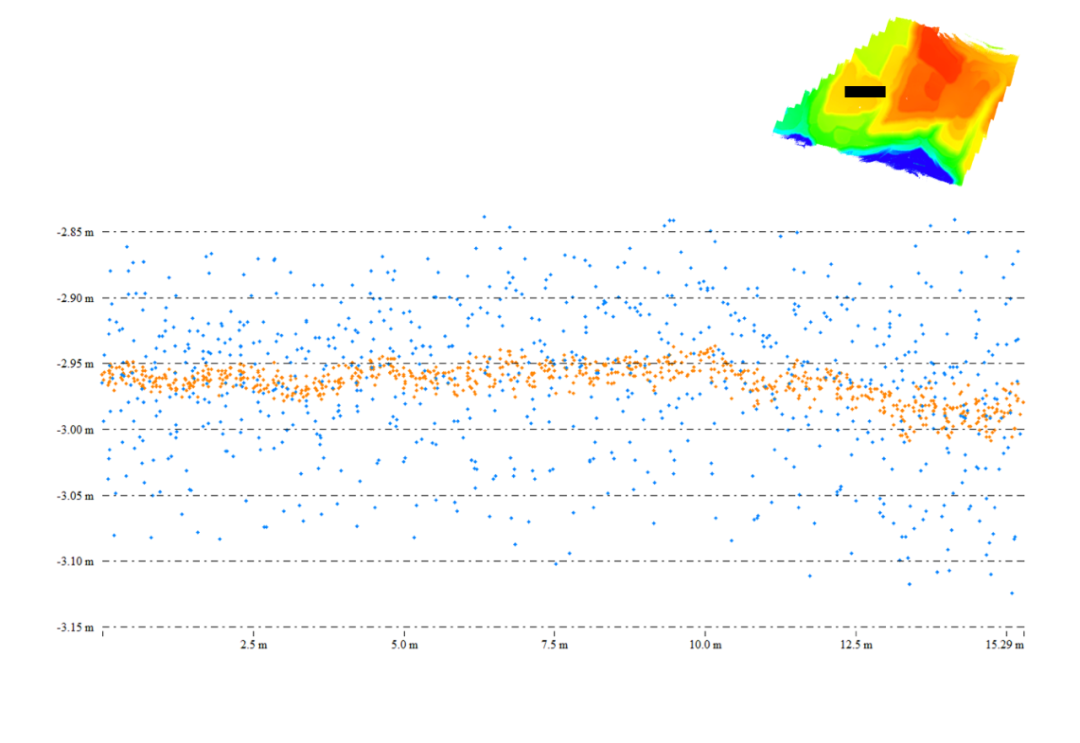
精度增强
横截面
蓝色:原始点云
橙色:精度增强
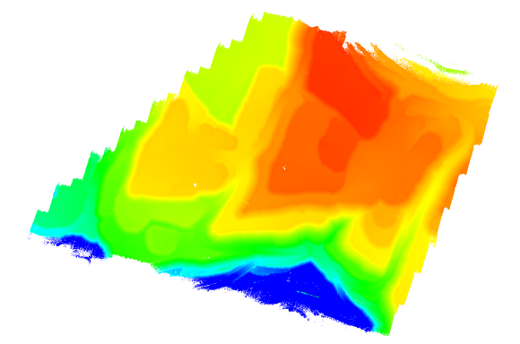
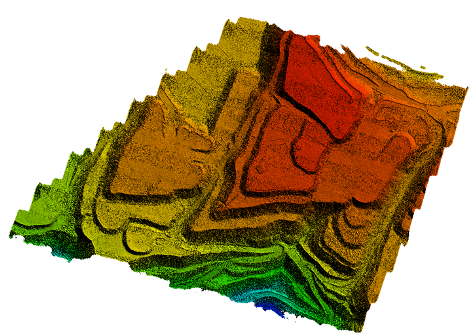
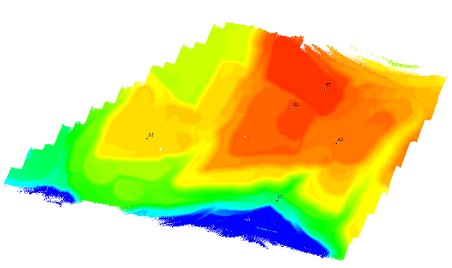
DSM