案例 | mdLiDAR3000LR方案应用于内蒙古某露天矿及矿上铁路实测案例
转载 2020-07-24 13:47 镁科众思市场部 来源:Microdrones
![镁科众思科技(佛山)有限公司]()
![]()
![]()
![]()
近日,Microdrones(镁科众思)接到某矿业集团项目,使用无人机机载LiDAR(激光雷达)对其位于内蒙古某露天矿的排土场、露天矿坑以及矿上铁路进行空中测量。应用需求:1.测量排土场和露天矿坑2. 测量矿上铁路数据要求:客户要求测量精度优于5cm。应用难点:现场风很大,对飞机的姿态和飞行安全提出了挑战;测区高低落差大,从排土场最高处到煤矿最低处,高差约200m,对LiDAR的测距性能提出了挑战;现场多为土质地面和煤层,无法找到有效的特征点。使用RTK采集检核点,精度一般,会影响整体的精度分析。
![]()
使用设备:mdLiDAR3000LR实施方案Microdrones端对端工作流程:
![]()
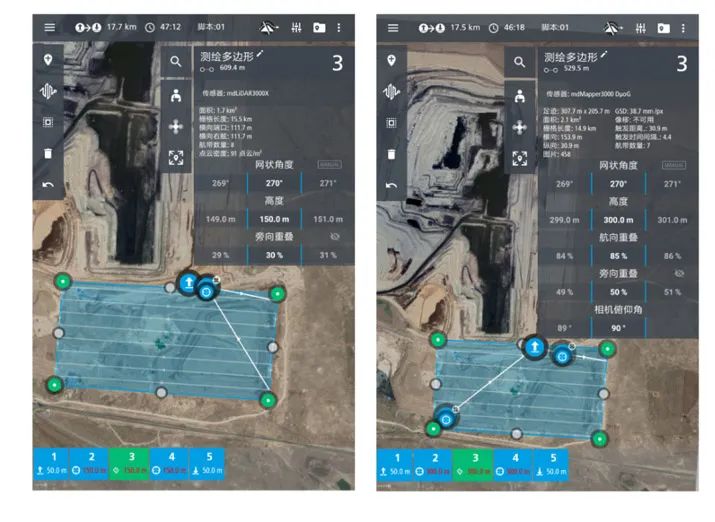
项目第一部分:测量排土场和露天矿坑航线规划飞行团队使用mdLiDAR3000LR对露天矿的排土场和露天矿坑进行空中测量。
![]()
![]()
现场照片:
![]()
![]()
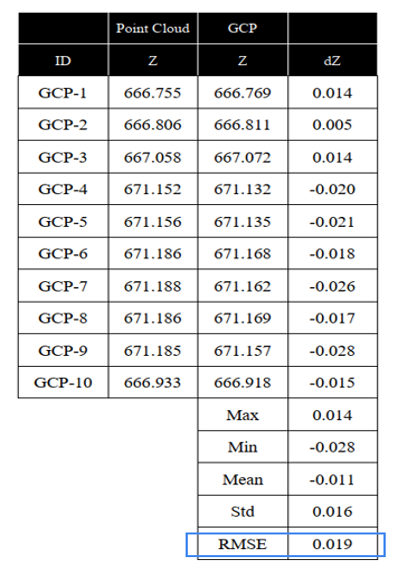
航测实施我们在演示区域飞行了2个架次,采集了GNSS数据、机载激光雷达原始数据和惯导数据。经过处理得到了该区域的精确数字三维点云:点云覆盖面积1.858平方公里,点云密度约为每平方米156个点。为了正确评估测绘成果的准确度,Microdrones采用以下方法:使用Global Mapper软件,导入数字三维点云。使用Global Mapper软件,在正射影像上采集所有地面检查点(1个Smart target,45分钟,精度优于CORS;其他点使用CORS测量)的坐标。将地面检查点坐标与航测数据后处理得到的坐标进行比较,统计误差。
![]()
准确度和精度分析
在基于 Global Mapper 的三维点云的独立精度检测中,我们可以发现 Z 方向的均方根误差为 1.9cm。改进及分析:由于没有携带硬质标靶,在现场寻找特征点进行采集,地面较松软,对高程精度有一定的影响;由于使用CORS进行测量,RTK本身就有一定的误差。
![]()
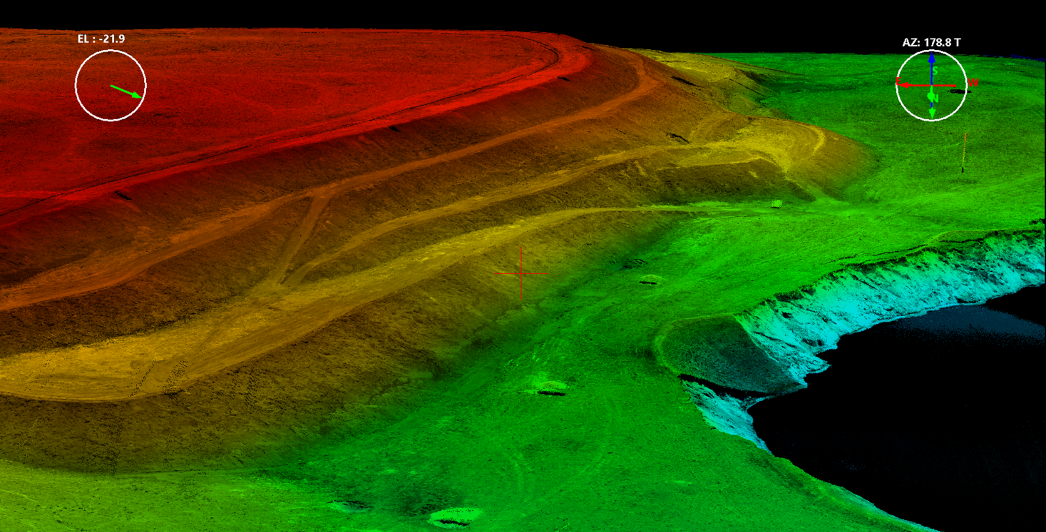
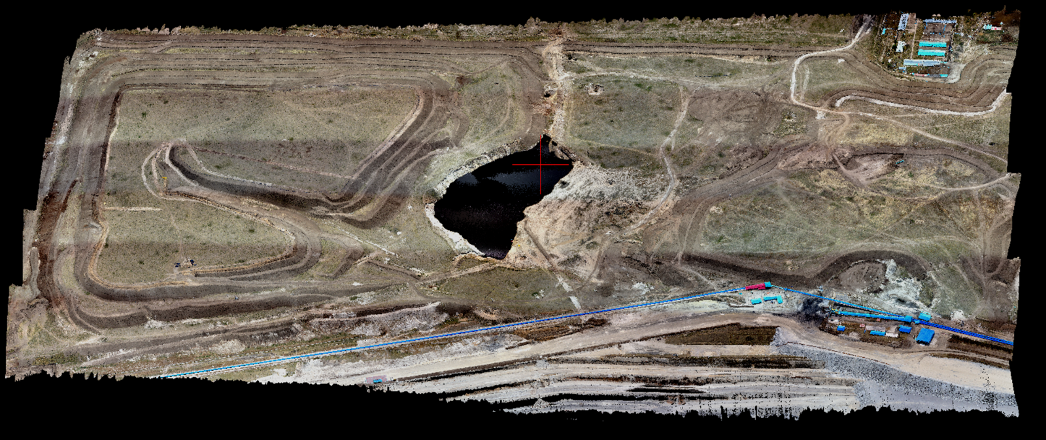
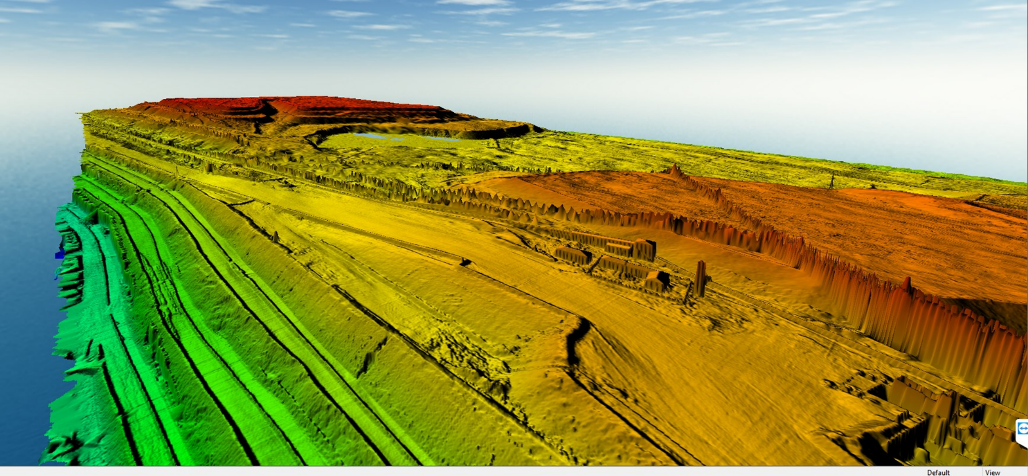
点云成果展示测区点云成果全景图
![]()
![]()
![]()
![]()
2)着色点云成果
![]()
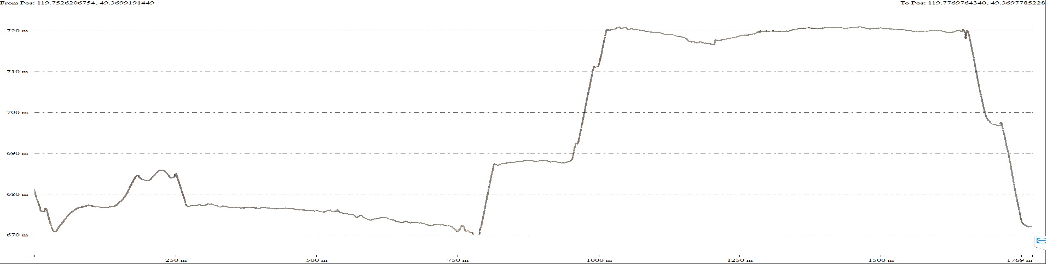
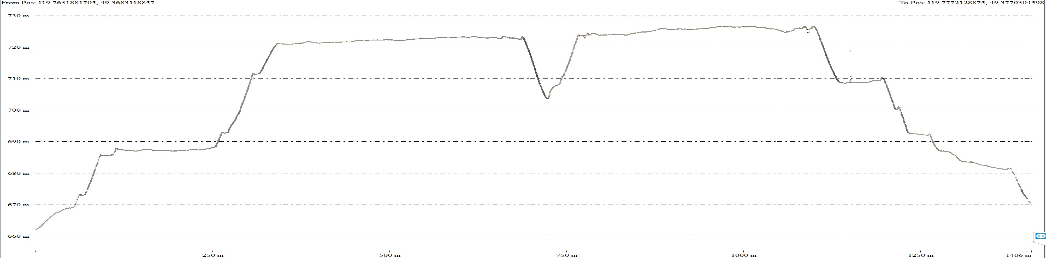
3)点云切片立面数据展示
![]()
![]()
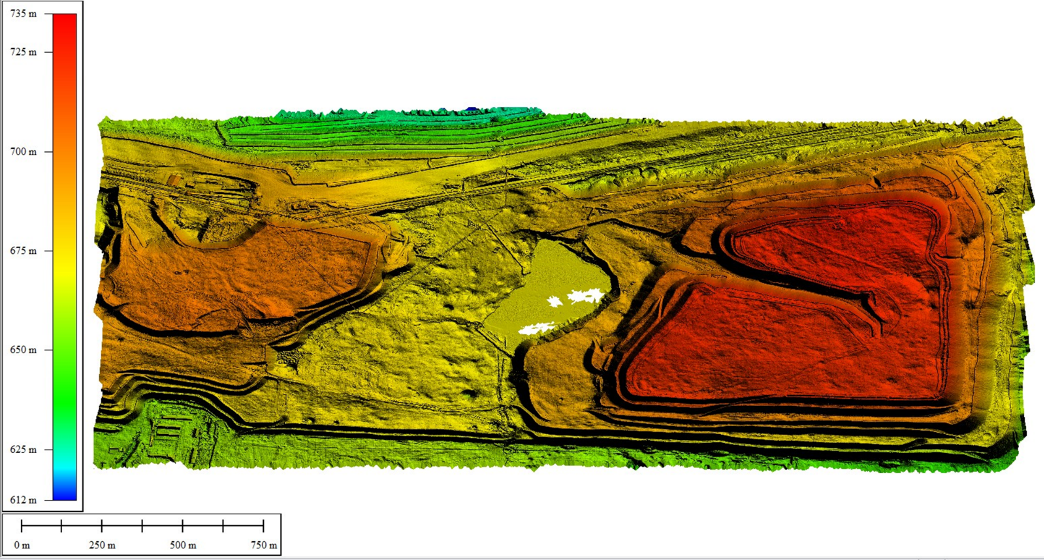
4)点云DSM成果
![]()
点云DSM成果局部图
![]()
![]()
5)数字等高线成果
![]()
项目第二部分:测量矿上铁路航线规划 飞行团队使用mdLiDAR3000LR对露天矿的矿上铁路进行空中测量。
![]()
现场照片:
![]()
![]()
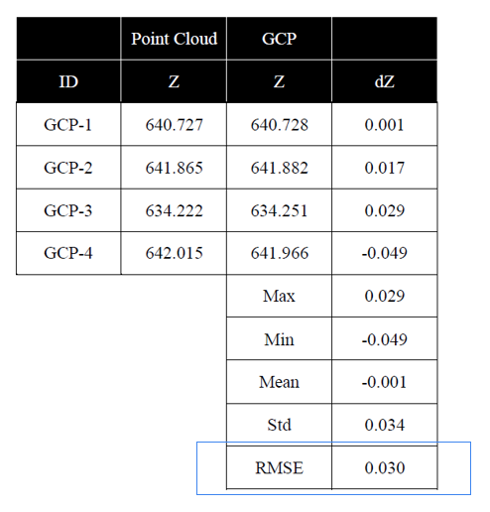
精度分析在基于 Global Mapper 的三维点云的独立精度检测中,我们可以发现 Z 方向的均方根误差为 3cm。
![]()
亮点分析:
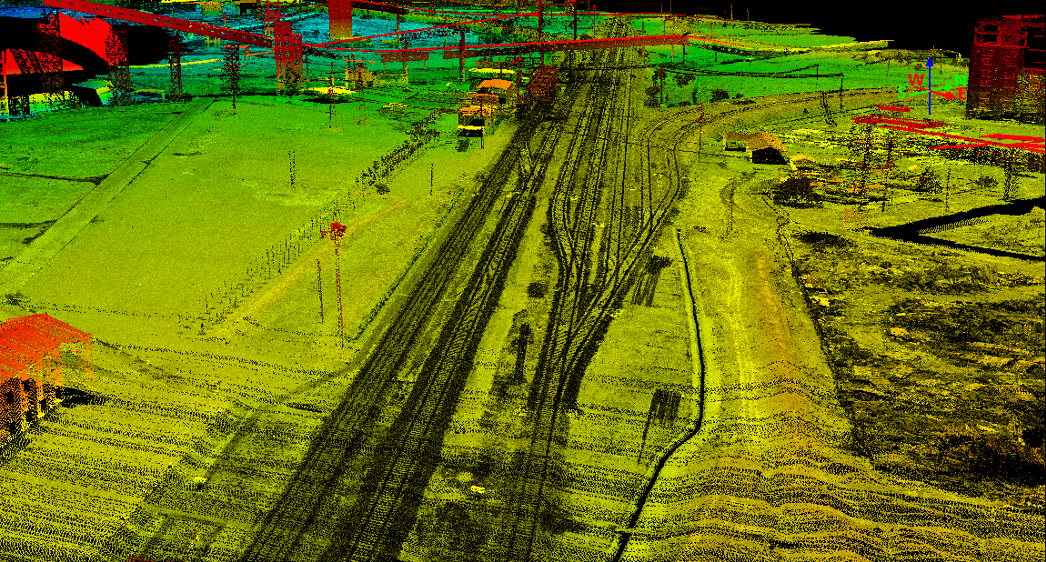
在不采集相控点的情况下,进行带状测绘(往返一次),这对无人机LiDAR系统提出了很高的要求。数据成果的高程误差只有3cm,成功体现了mdLiDAR系统的高精度、高集成度的优势。点云成果展示1)点云DSM成果
![]()
![]()
![]()
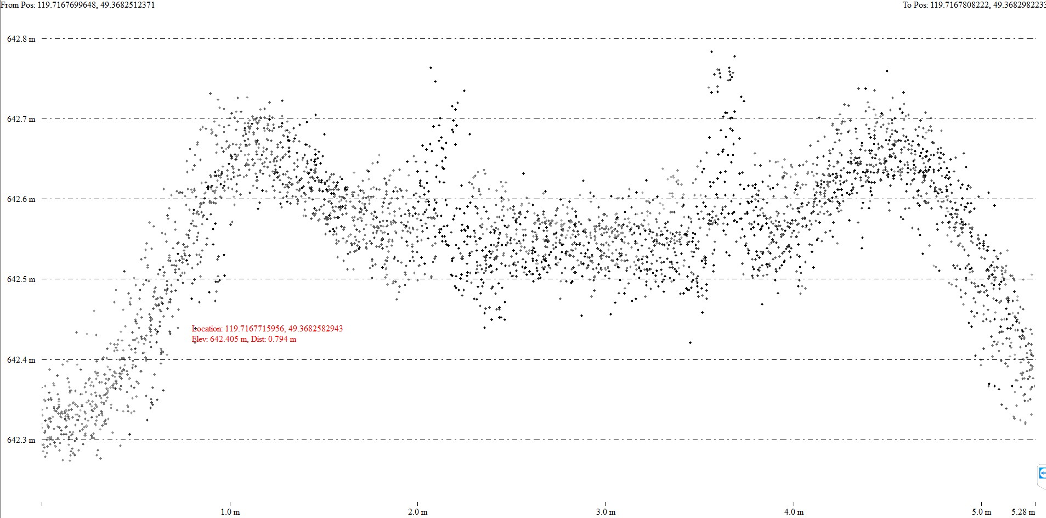
2) 单条铁轨点云切片立面数据展示
![]()
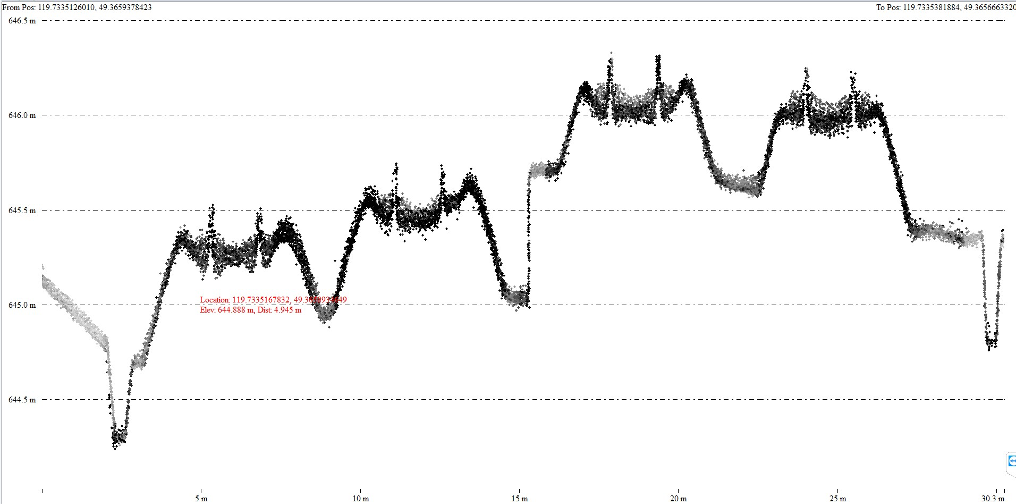
3) 多条铁轨点云切片立面数据展示
![]()
项目结论成果精度高(排土场Z方向均方根误差优于2.0cm,铁道带状测绘Z方向均方根误差优于3.0cm),数据连贯,无断层。飞行结束后,15分钟可得到点云数据。生产效率远超传统测绘方式,省时省力。生产安全性、时效性超越传统矿区测绘方式,测量人员无需进入采矿区域,在不影响正常生产的前提进行测绘,同时保证了正常生产和测量人员的安全。对于露天矿边坡滑坡、塌陷等特殊地形测量,能够完全避免测量人员进入危险环境,但能够及时获取准确的地形数据。带状测绘方案以其优秀的效率和精度,给铁路测量、巡检提供了一个更优方案。
![]()