案例 | mdLiDAR3000方案助力西安市某绕城高速路测量项目
转载 2020-07-08 13:54 镁科众思市场部 来源:Microdrones
![镁科众思科技(佛山)有限公司]()
![]()
![]()
![]()
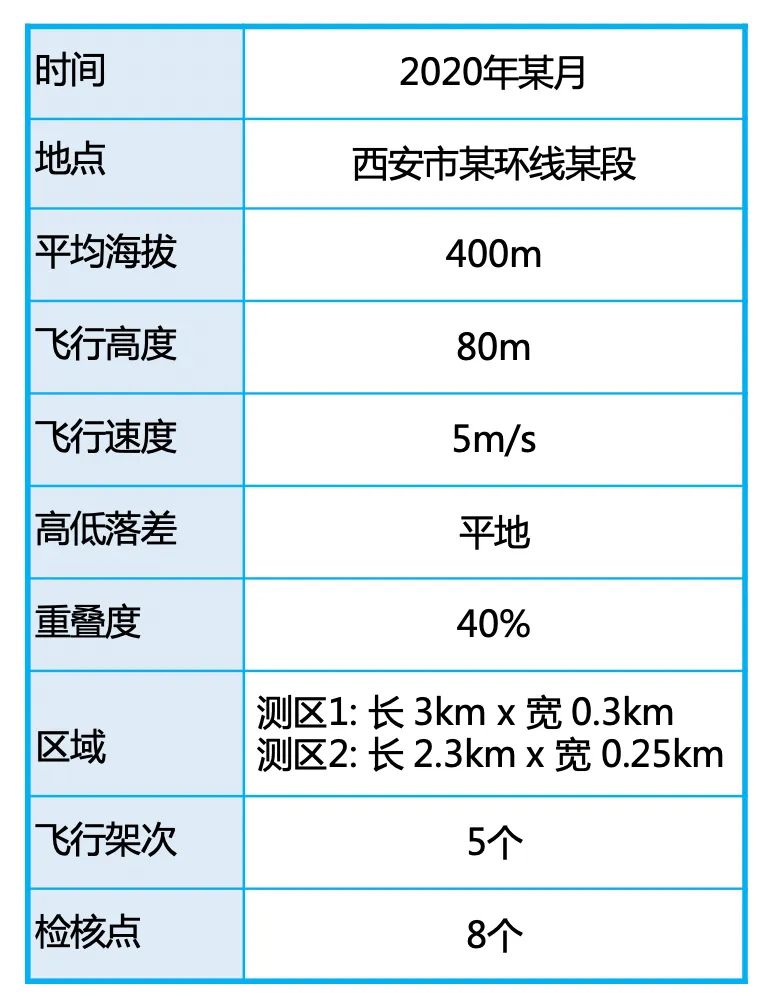
2020年初,陕西省西安市某客户需要执行一个高速公路的带状测绘项目,希望使用无人机搭载机载雷达(LiDAR)的方式进行快速测绘。数据要求:客户要求获取误差小于5cm的彩色点云文件。客户将使用该文件生成DLG格式文件。项目特点:经过Microdrones团队评估,项目的实施面临数个挑战:绕城高速位于市区,周边高楼林立,环境复杂;车辆川流不息,对路面点获取不利;对无人机安全性、稳定性要求非常高。
![]()
测区概览图
![]()
测区1:路段全长3 km,宽0.3 km;类型:城区高速公路测区2:路段全长2.3 km,宽0.25 km;类型:城区高速公路实施方案
![]()
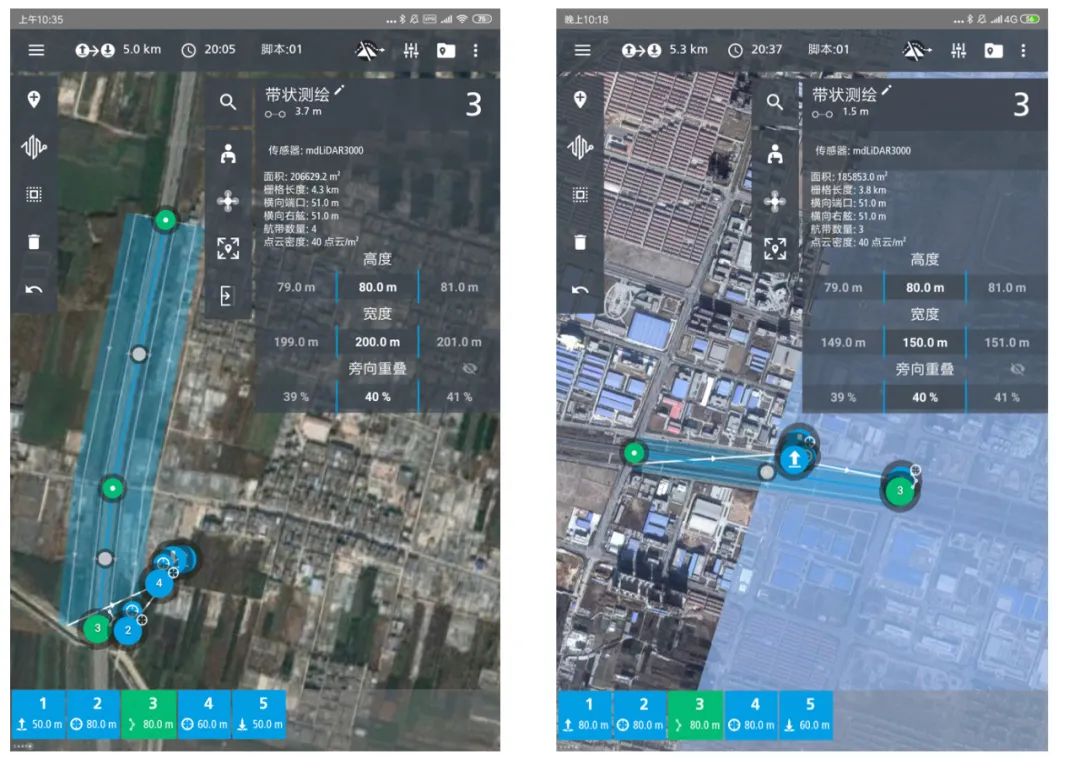
航线规划经过现场实地考察和分析,我们决定采用80m相对航高,5m/s平均飞行速度,40%旁向重叠率,分5个架次飞行。
![]()
![]()
航测实施该案例中,我们使用Microdrones 集成系统——mdLiDAR3000,对两段高速公路带状区域进行了数据采集,区域大小分别为0.689 平方千米以及0.42 平方千米。mdLIDAR3000 采用机载激光雷达(LiDAR)作为传感器,主要采集点云数据。使用设备:mdLiDAR3000解决方案
![]()
飞行5个架次共2个区域,扫描面积共1.1 平方公里;飞机采集了GNSS数据、机载激光雷达原始数据和惯导数据;经过处理得到了该区域的精确数字三维点云,两段区域的点云密度分别为每平方70个和每平方米80个。数据处理为了正确评估测绘成果的准确度,Microdrones 采用了以下方法:使用Global Mapper 软件,导入数字三维点云;使用Global Mapper 软件,采集所有坐标已知的地面检查点;将地面采集的检查点坐标与地面已知点坐标进行比较,统计测得和已知的地面检查点的误差。
![]()
现场在已知点上进行架设基站,采集静态数据;采用RTK打点的方式采集检核点,共计6个。优先使用靶标,如无法实现,采集特征点;GPS设备采用华测品牌。
![]()
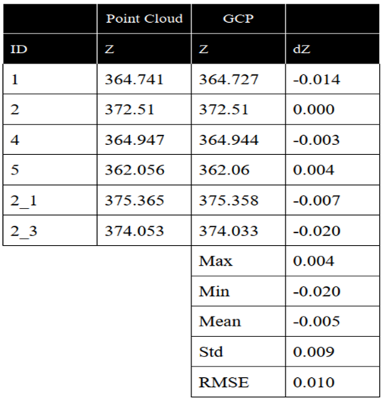
上图:现场采集特征点基于Global Mapper的三维点云独立精度准确评估结果
![]()
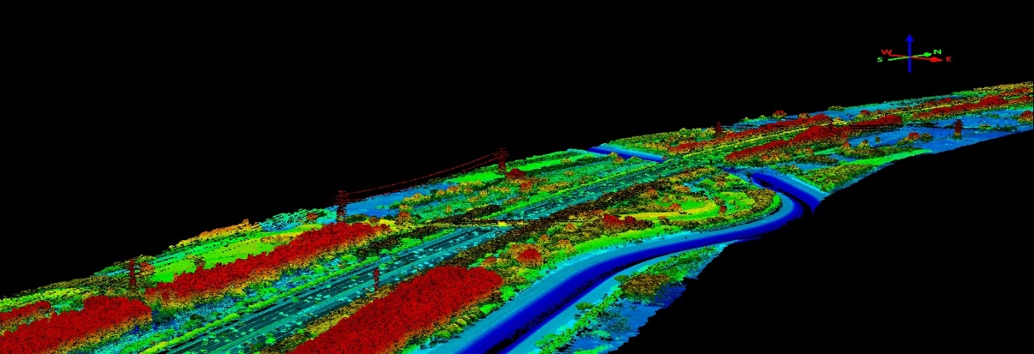
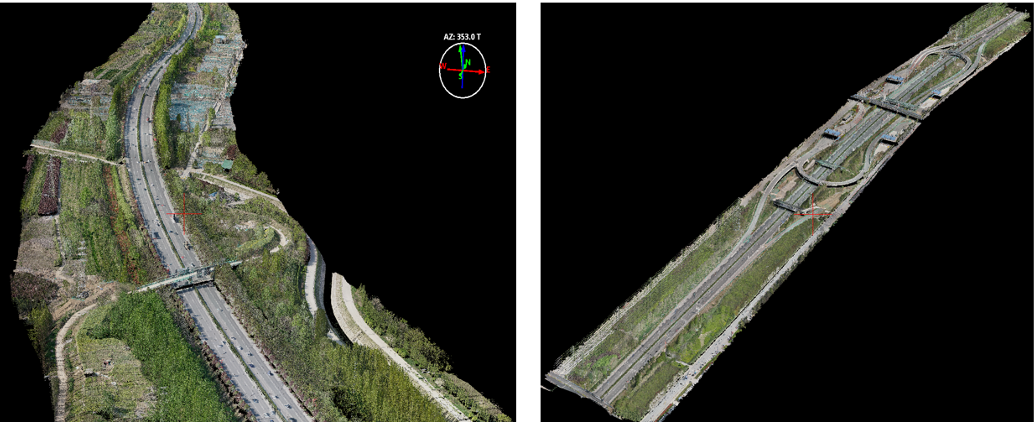
点云成果展示测区彩色点云
![]()
![]()
![]()
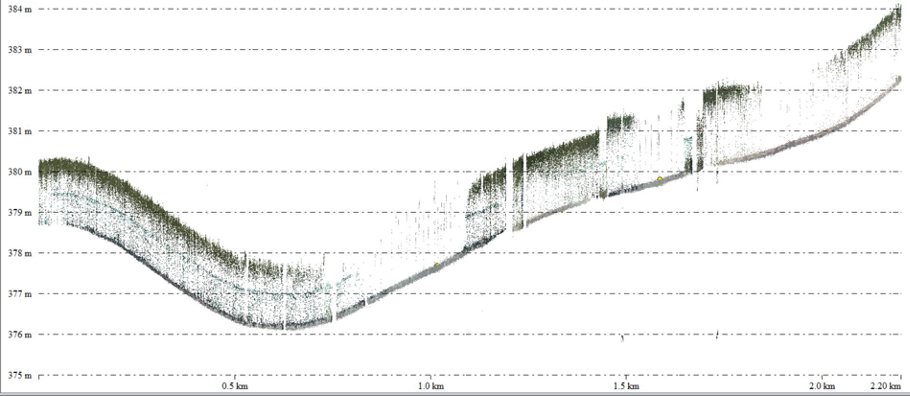
测区纵断面
![]()
项目结论成果精度高(Z中均方根误差1.0cm,应客户需求仅需要分析高程精度差异);生产效率远超传统测绘方式,地面站式扫描仪在不停运的高速路上也存在架站困难的问题;mdLIDAR3000低重叠度的特点大大提升了带状测绘的内外业效率;单次飞行时间30分钟以上,5个架次即可完成此次项目。