mdInfinity 论文 | 从无人机 LiDAR 和摄影测量数据中检测和剔除离群值
转载 2021-02-08 08:47 镁科众思 来源:Microdrones

mdInfinity通过提供高价值的软件来改进地理空间数据工作流程和提升交付成果的质量。
这篇题为《基于密度和形态滤波器的离群值剔除算法》的论文提出了一种由 mdInfinity 团队开发的方法,为无人机机载 LiDAR 和摄影测量系统采集的3D点云检测和剔除离群值。
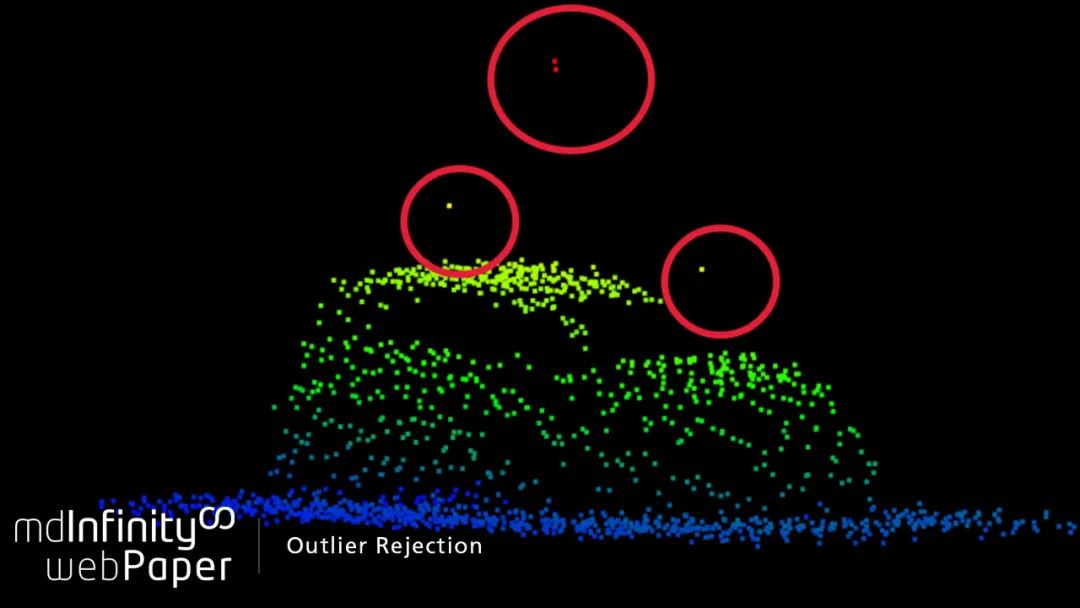
离群值是指在统计上与数据集的其他元素不一致的值。它们通常是点云分析工具(例如网格划分算法)产生问题的根源,可能导致对象重建错误,或者在形状测量中产生偏差。在高质量的点云中不应该出现离群的点。如果采用基于密度的离群值检测方法来处理它们,该算法可能会将每个孤立点标记为离群值。事实上,一个点可能与其局部的相邻点“隔离”,但仍然是几何结构(例如电缆、塔架、平面)的一部分。例如,在 LiDAR 测量数据中,对电缆很可能采样不足,描述电缆几何形状的点往往被有效隔离,但这并不意味着它们与实际测量不一致。相反,这些点包含的扫描表面的信息,比周围有许多点的平坦区域中的点多得多。mdInfinity 开发了一种基于两个指标组合的离群值检测方法:密度和形态滤波器。前者由经典的局部离群因子方法派生而来,能够利用其附近的密度变化来检测孤立点。后者则是一种原创方法,侧重于一个点与其邻域所定义的结构之间的形态一致性。本论文包含以下几个部分:
离群值概念和定义
离群值检测方法
mdInfinity的离群值检测方法
基于密度的离群值检测
基于形态的离群值检测
两个离群分数的合并
离群值检测与降噪的结合
结论
了解更多如何使用mdInfinity软件进行点云降噪和离群值检测的信息,从而减少 3D 点云中不可靠信息的数量和创建强大的数据交付成果。