【禹辰课堂】Yusense Map史上最全操作指南,一键流程化处理更快捷!
转载 2021-12-10 14:05 长光禹辰 来源:长光禹辰
Part 1
软件简介
Yusense Map是一款功能强大、操作简单的无人机多光谱影像预处理软件,可以一键式进行相机参数读取、空中三角测量、波段配准、生成正射影像和光谱指数计算等一系列任务。
Yusense Map
Part 2
软件特点
v 高质量数据预处理精准辐射校正,亚像素级波段配准,无缝正射影像拼接,最大程度保障目标真实属性。v 图像综合处理多光谱、热红外、可见光图像综合处理,多源遥感数据同步解译,提升信息挖掘能力。v 兼容,开放兼容长光禹辰自主研发的全系列多光谱相机,兼容Yusense Map Plus应用处理软件,支持功能定制开发。v 简单、便捷流程化处理,操作简单,人机交互机制友好。v 一次购买,永久使用
加密锁永久、灵活使用,不限IP,离线处理,保障数据安全。
Part 3
操作指南
1. 安装指导
首次安装需要进行以下操作进行安装及授权,否则软件无法正常启动。
(1)软件安装
关闭电脑杀毒软件,解压安装包后点击‘setup’应用程序(如图1- 1软件安装),默认流程路径安装即可。
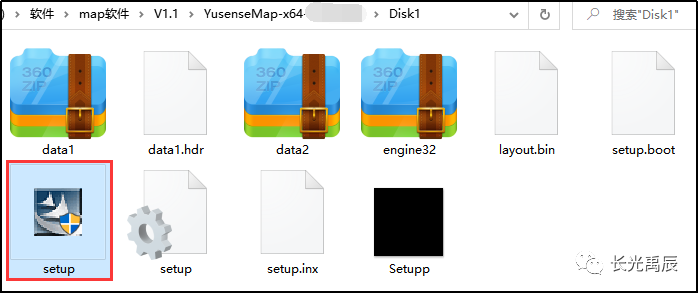
图1- 1软件安装
(2)许可安装
Yusense Map安装完成后进入安装目录(默认C:YusenseMapBinDrivers)运行Drivers下的许可安装包,安装用户许可,如图1- 2许可安装。

图1-2许可安装
(3)管理员授权
许可安装完成后进入安装目录(默认C:YusenseMapBin)找到regist文件,如图1- 3管理员授权,选中regist文件右键,以管理员的身份运行。

图1-3管理员授权
(4)软件授权
方式1:加密锁授权
购买永久版加密锁,支持离线处理,保证数据安全,不限IP,随插随用,如图1- 4单机授权。
图1- 4单机授权
方式2:云账号授权
申请云账号试用,点击打开用户许可工具,利用邮箱或手机号进行云账号注册,界面如图1- 5注册界面,联系我司授权后方可登陆使用。

图1-5注册界面
Yusense Map软件安装操作视频:
2. 波段配准
(1)新建工程
打开软件,选择新建工程(影像内置GPS)→点击左上角添加影像图标,选择5~10组具有代表性图像(选择正常飞行中的影像,避开大面积水体或高差大的区域)→输入工程名,保存工程。

图2- 1新建工程
(2)相机参数设置
在工程界面显示下,点击 “相机参数设置”→从影像中读入→点击保存,完成内定向。
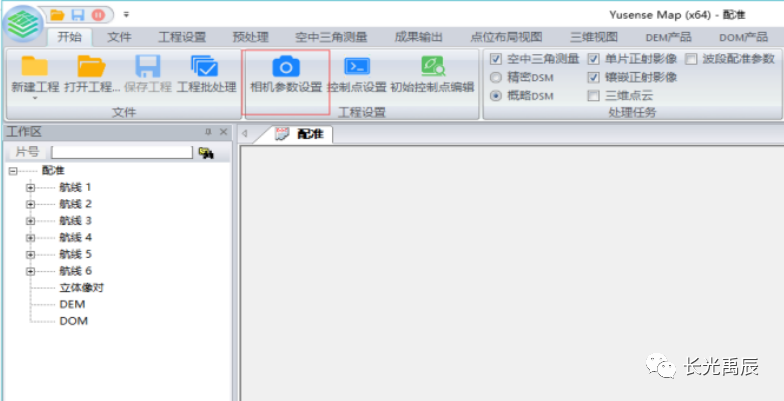
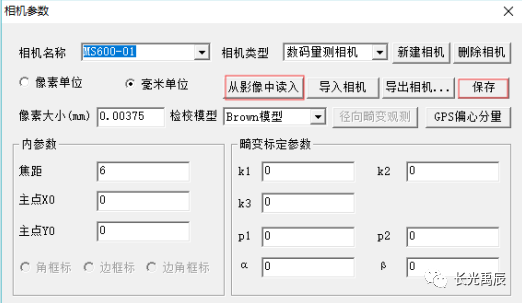
图2- 2相机内定向
(3)开始处理
仅勾选开始菜单下的“波段配准参数” →“开始处理”→输入平均相对航高(外场飞行时设置的高度)→确定。
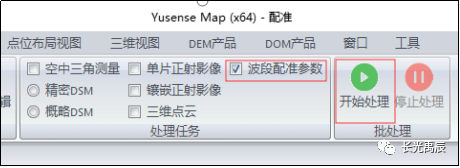
图2- 3波段配准
自动配准耗时与数据量及硬件配置有关,配准结果自动存储在工程所在目标下的“BandAlignedImages”文件夹下。
图2- 4配准结果
Yusense Map影像配准操作视频:
【视频演示数据为AQ600多光谱相机采集,AQ600为5个多光谱通道+1个RGB通道】
3. 影像拼接与辐射定标
(1)新建工程
打开软件,选择新建工程(影像内置GPS)→点击左上角添加影像图标,选择所有配准后的_Multi.tif 文件→输入工程名,保存工程。
(2)航线编辑
拼接前在“点位布局图”中利用 “删除影像”工具(两种工具)删除起飞及降落时的影像以及其他异常影像,注意此操作不可逆,请确认后删除。

图3- 1 航线修整
(3)相机参数设置
在工程界面显示下,点击 “相机参数设置”→从影像中读入→点击保存,完成内定向。
图3- 2相机内定向
(4)拼接
开始菜单栏下同时勾选“空中三角测量、概略DSM、单片正射影像、镶嵌正射影像”,点击“开始处理”确认拼接。
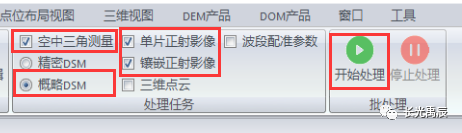
图3- 3影像拼接
PS:数据配准及拼接步骤也可利用全流程处理工具完成。如下图-,选定相机类型,设置输入输出路径即可开始处理,详见《YusenseMap数据预处理操作手册》(请下载软件安装包解压后查看)。
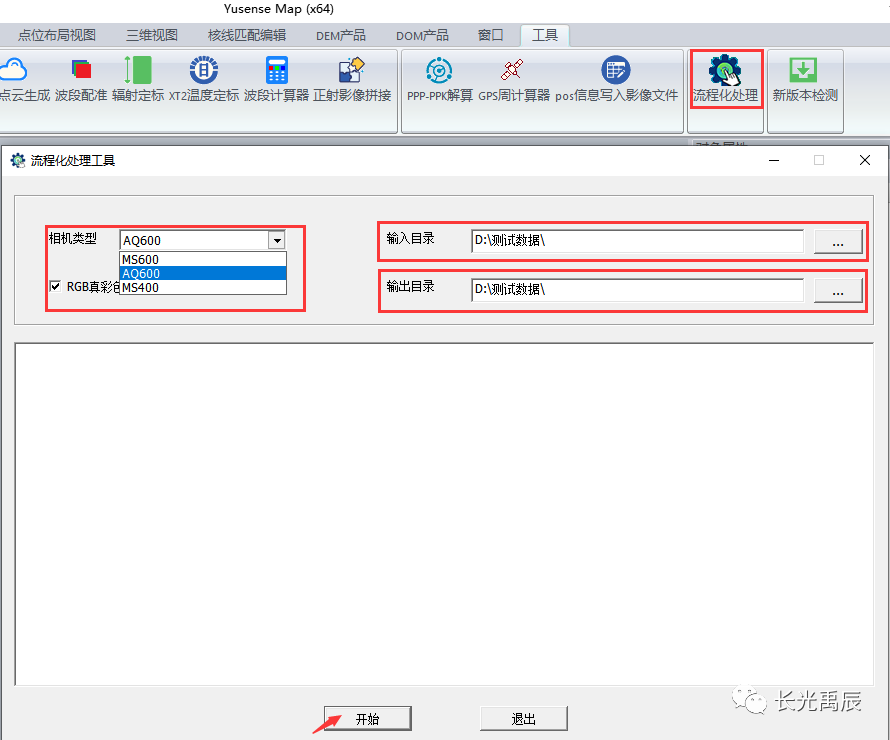
图3- 4数据处理全流程界面
(5)辐射定标
提示影像镶嵌结束后,点击“工具”栏→“辐射定标”→选择单幅影像,输入拼接后TIFF影像路径→添加标定板影像→选取标定板范围→按波段顺序输入灰板标准反射率→点击“处理”。

图3- 4数据处理全流程界面
最后得到的**-RadCalibreation.tif 即为拼接后的反射率数据。
Yusense Map影像拼接操作视频:
【视频演示数据为AQ600多光谱相机采集,AQ600为5个多光谱通道+1个RGB通道】
4. 光谱指数计算
利用工具栏下波段计算器加载拼接后反射率数据进行典型光谱指数计算。本工具支持波段-波段、波段-数字、数字-数字间的四则运算。根据植被指数对应的公式,依次输入运算符,双击带入相应波段即可。
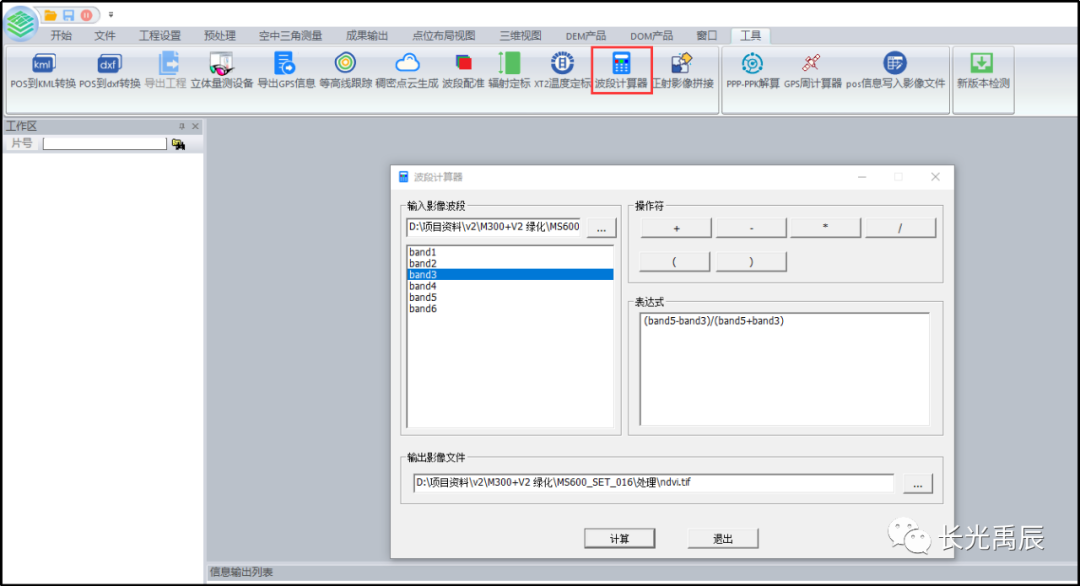
图 4指数计算
Yusense Map指数计算操作视频:
【视频演示数据为AQ600多光谱相机采集,AQ600为5个多光谱通道+1个RGB通道】
Part 4
注意事项
软件及许可应按要求安装并授权,若不以管理员身份运行“regist.exe”,将导致软件不能正常运行;
原始数据严禁一切人为修改,如旋转、压缩、利用其他软件修改tag等;
配准时仅需要加载10组左右的原始影像,拼接时加载所有的配准后文件,影像混乱加载将导致软件不能正常运行;
辐射定标需一组完整灰板,标准反射率对应次序与航空影像一致,标准反射率一般在0.6左右;
拼接的影像应具有明显特征点,全水影像可能导致最终拼接不完整。
Part 5
便捷工具-流程化处理
在发布的 V2.2.0 版本及以后版本中,新增了流程化处理工具 ,在选择相机类型并输入原始影像目录与生成影像目录后,软件将自动执行配准矩阵生成、影像配准与影像拼接步骤,最终仅需用户手动进行反射率校正即可完成全部操作流程。具体流程如下。
1. 打开 Yusense Map 软件,在“工具”菜单栏中使用“流程化处理” 模块进行一键化处理。

图5- 1流程化处理工具
2. 选择相机类型,选择原始影像路径与成果输出路径,点击开始即可处理。
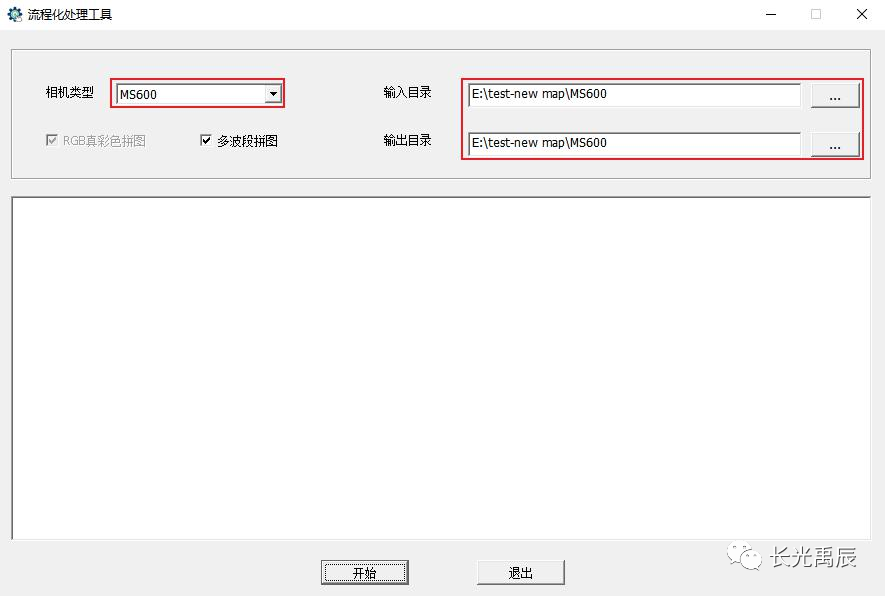
图5- 2流程化处理界面
3. 开始处理后,“流程化处理”模块界面中的状态栏会实时显示所执行各个步骤的状态,该功能模块将依次执行配准矩阵生成、影像配准、影像拼接三个处理步骤。
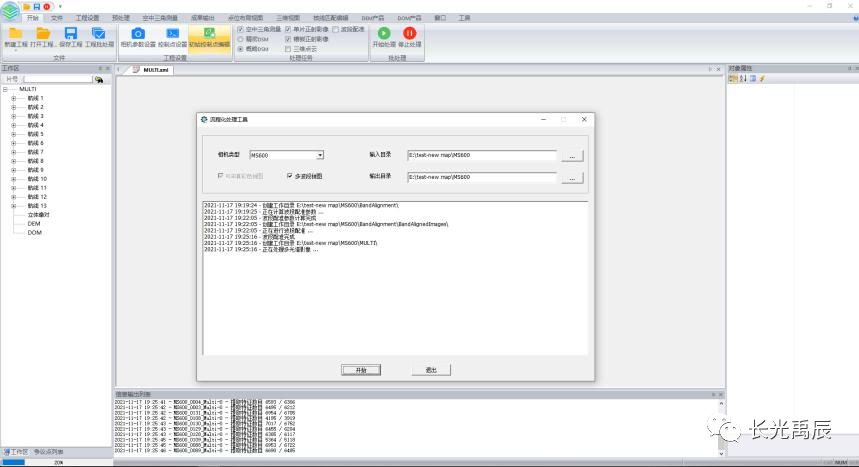
图5- 3流程化处理步骤
4. 处理完成后,在状态栏中会显示各个步骤成果所存储的路径,打开相应路径下的文件并对其进行反射率校正,即可完成全部处理流程。

图5- 4流程化处理结果存储目录
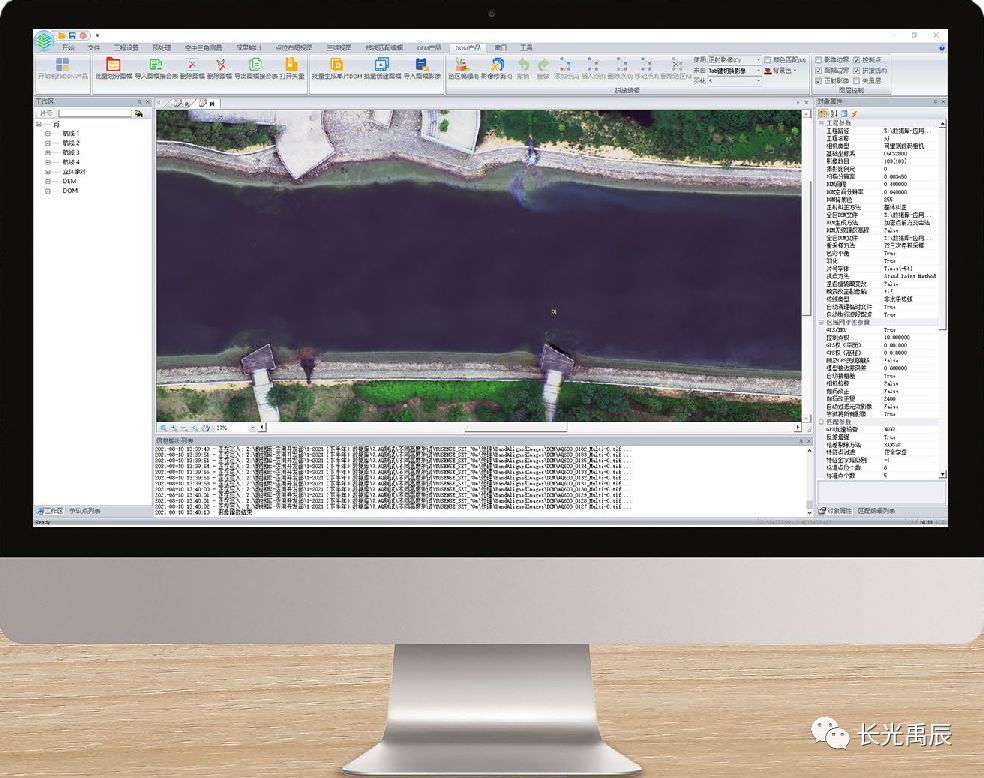
图5- 5成果影像
注意事项:处理前请手动剔除起飞降落航线上的影像,避免影响拼接效果。
Yusense Map便捷工具-流程化处理操作视频:
【视频演示数据为AQ600多光谱相机采集,AQ600为5个多光谱通道+1个RGB通道】
关于我们
长光禹辰成立于2017年,是一家由中国科学院长春光机所和青岛高新区联合成立的高新技术企业,公司核心团队来自长春光机所,形成了以MS600多光谱相机为代表的无人机载光谱遥感硬件产品线、以Yusense Map/Map Plus为依托的光谱数据预处理及分析软件和以Yusense Cloud为依托的端云一体化服务平台,并在农业、林业、生态、环保、警用等领域开展了深入的行业应用。公司专注于无人机航空遥感与光电探测领域,持续推出革新的软硬件产品,落地更丰富的行业应用场景,致力于用技术和产品推动行业进步。
相关资讯
更多- 慧明捷资讯|慧明捷全程护航“畅通胶东·2026应急通信保障演练”
- Prime Air再拓美国城市:亚马逊无人机配送进入克利夫兰,低空物流竞争转向多城市复制
- 从爱尔兰飞向美国都市:Manna在Tulsa启动首个完整城市级无人机配送运营基地
- 重载无人机驰援雪域高原!容祺KTZ3列装云南迪庆消防,科技重塑高原救援新战力
- 迎汛而上,空中巡防丨低空遥感赋能多地防台应急
- 重大突破!宏图一号四星编队SAR攻克热带雨林监测难题 国产卫星赋能全球森林碳汇核算
- 扬帆“十五五”,开启低空经济新篇章
- 央视新闻联播聚焦深圳福田无人机AI新应用
- 国产“Lattice OS”——天枢OS | 直面“低慢小”蜂群威胁,以群反群重塑低空防御体系
- 云卓科技|以科技启迪成长,以责任守护未来