利用机载网枪反无人机背后的科学原理
转载 2022-04-11 11:24 空中机器人前沿 来源:空中机器人前沿
全文1738字,预计阅读时间4分钟
原创 | 米轶泽
编辑 | 吕嘉玲
本文主要介绍利用机载网枪进行无人机反制的相关技术。之前的文章(微小型无人机,一把双刃剑)提到:在目前的反无人机方案中,尚缺乏一种高自主化、强通用性、且可靠安全的反制技术。而利用携带网枪的安保无人机进行反制这一方案能很好地填补这方面空白:首先它容错率高,且足够安全,即使发射存在一定的误差也可以成功抓捕,并且在抓捕过程中不会对周边环境造成损害。其次它的适用范围广,对目标无人机的形状尺寸、是否无线电静默等均无要求,因此能够针对各类“黑飞”进行有效抓捕。当然,还有一点是它的部署成本低,只需要能够携带网枪的自主无人机系统即可[1]。然而,采用无人机网捕这一技术面临着一系列难题,例如:网枪系统在什么条件下发射才能够抓捕到目标呢?发射出去的飞网,又会做怎样的运动呢?
一、网枪的工作原理
想要回答这两个问题,就要先从网枪发射飞网的原理说起。飞网平时储存于网枪的发射筒中,发射时依靠击发装置(火药、气瓶)释放:网枪以固定的初速度和初始角度弹出系在飞网上的质量块,而飞网在质量块的牵拉下被动展开,直到其最大面积。图 1 是 University at Buffalo 研制的网枪系统[2],他 们在 Vicon 环境下研究了飞网在发射过程中的运动情况,并得到了各个节点的运动数据。
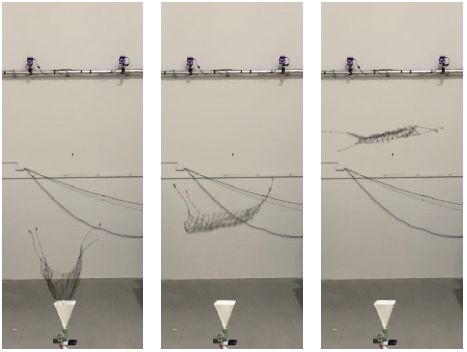
图 1 网枪发射飞网的动态过程[2]
一些研究者发现飞网的这种运动过程,可以建模成一种集中质量-半阻尼弹簧模型 [1], [3]。图 2 是一种飞网建模的示意图[4]。这种模型针对网中绳索可拉长但不可压缩的物理特性,主要模拟绳索的轴向拉伸变化[5]。通过这种模型我们可以计算飞网中各节点单元所受的内力大小。在进一步考虑重力和空气阻力等对飞网的影响之后就可以通过牛顿运动定律得到飞网各节点的运动状态。对其数学推导过程感兴趣的读者可阅读文献[3], [6]。
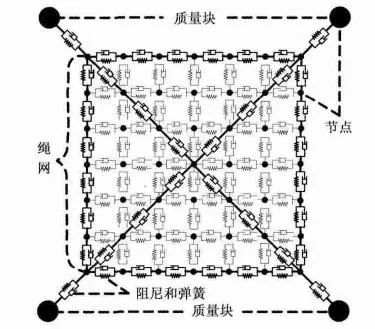
图 2 将飞网建模成集中质量-半阻尼弹簧模型[4]
二、 发射效果模拟及分析
下面的 2 个 GIF 分别是针对我们实验室的网枪系统获得的飞网仿真以及实际实验发射飞网的效果。

图 3 飞网仿真效果
视频1 实际实验效果
从视频1可以明显看到,飞网在发射之后,网口先逐渐扩大,后逐渐收缩。并在空气阻力作用下飞网沿发射方向的速度逐渐减小,因此,有这样 2 个指标可以用来描述飞网的展开特性[6]:1. 展开面积(deployment area):展开面积指的是相邻的质量块依次连接形成的多边形面积。飞网的展开面积随时间的变化示意图如图 5 所示:其中表示的是最大展开面积,以及所需飞行时间。当飞网展开面积不小于时,就认为能够实现对目标的抓捕,此时对应的时间范围是。
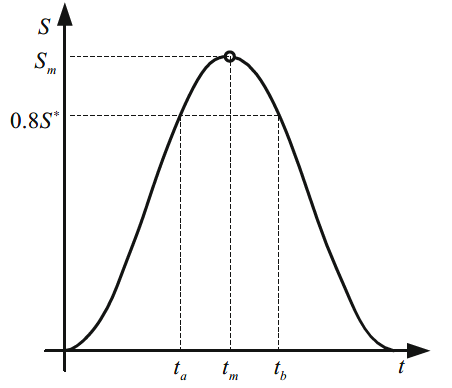
图 5 展开面积的示意图[6]
2. 飞行距离(flight distance):根据图 5 中得到的三个时间可以分别计算出相应的飞网运动距离,如图 6所示。被认为是飞网的有效作用距离。
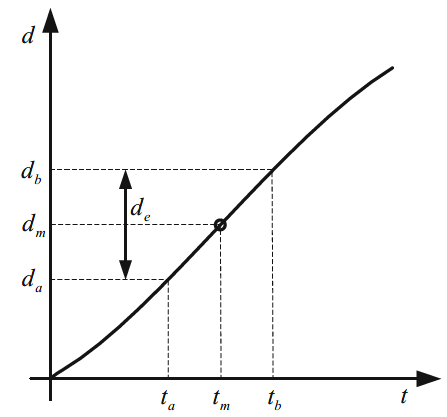
图 6 飞行距离的示意图[6]
利用上述两项指标就可以描述飞网运动的特点,并以此为安保无人机的运动策略提供指导。
三:从航空到航天,飞网潜力无限
飞网除了用于反无人机之外,还可以给太空轨道做垃圾清除。在今年 1 月份,我国的“实践-21 号”卫星就利用飞网成功清理了一颗失效的北斗导航卫星,引发了国际航天界的高度关注。据推测[7],在这次任务中,“实践-21 号”卫星先运动到地球同步轨道并靠近失效卫星,再释放出了一张“大网”,包裹住失效卫星, 之后将目标拖到“坟墓”轨道,并释放,最后“实践-21 号”卫星返回自己的运行轨道。

图 7 实践-21 号”卫星清理太空空间碎片模拟图。
图源:GJ
除了我国之外,还有不少国家和地区也在积极推进相关技术的研究。欧空局(European Space Agency,ESA)启动了e.deorbit 项目以进行空间碎片清除技术的研究。该项目中的柔性绳网方案就是利用飞网来实现对空间碎片的柔性抓捕。目前该项目已经研制出了绳网捕获的原型机并完成了抛物线飞行试验,在微重力环境下测试了飞网发射系统[8]:

图8 抛物线飞行实验中测试飞网系统[8]
相比于e.deorbit,另一个欧洲当局资助的研究项目(RemoveDEBRIS)已于2018年9月成功完成了在轨绳网抓捕实验[9]:卫星释放了用于模拟太空碎片的立方体DSAT#1,并随后发射了飞网完成了对目标立方体的捕获,见图9:
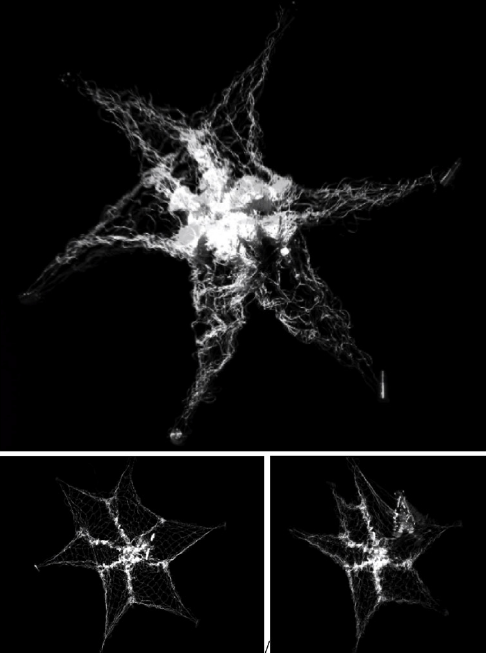
图9 由6个质量块牵拉的飞网展开过程[9]
上述的这些实例反映出飞网抓捕有着很大的应用潜力,它所具备高容错、低要求和低成本的特点,能够应用于各种各样的无人机反制场景;此外在轨道垃圾清除方面飞网抓捕技术也占据优势,受到了世界各国的青睐。当然,随着飞网的应用范围越来越广,也涌现出越来越多亟待解决的科学问题。一起期待这项技术的进一步开发和完善吧!
参考文献:
[1]陈青全, “柔性绳网动力学与应用,” 博士, 国防科技大学, 2019.
[2]D. Yu, A. Judasz, M. Zheng, and E. M. Botta, “Design and Testing of a Net-Launch Device for Drone Capture,” presented at the AIAA SCITECH 2022 Forum, San Diego, CA & Virtual, Jan. 2022.
[3]E. M. Botta, “Deployment and Capture Dynamics of Tether-Nets for Active Space Debris Removal,” p. 192.
[4]张青斌, 孙国鹏, 丰志伟, 祁玉峰, 刘永健, and 高庆玉, “柔性绳网动力学建模与天地差异性分析,” 宇航学报, vol. 35, no. 08, pp. 871–877, 2014.
[5]高庆玉, “空间绳网系统展开动力学与优化设计,” 博士, 国防科技大学, 2017.
[6]L. Yang, Q. Zhang, M. Zhen, and H. Liu, Dynamics and Design of Space Nets for Orbital Capture. Berlin, Heidelberg: Springer Berlin Heidelberg, 2017. doi: 10.1007/978-3-662-54064-0.
[7]“新民环球 | ‘实践-21号’卫星为何让西方紧张?-手机新民网.” https://wap.xinmin.cn/content/32115601.html.
[8]W. Gołębiowski, R. Michalczyk, M. Dyrek, U. Battista, and K. Wormnes, “Validated simulator for space debris removal with nets and other flexible tethers applications,” Acta Astronautica, vol. 129, pp. 229–240, Dec. 2016.
[9]G. S. Aglietti et al., “The active space debris removal mission RemoveDebris. Part 2: In orbit operations,” Acta Astronautica, vol. 168, pp. 310–322, Mar. 2020.
-END-
本文由西湖大学智能无人系统实验室博士生米轶泽原创,申请文章授权请联系后台相关运营人员。
▌知乎:空中机器人前沿
▌Bilibili:西湖大学空中机器人
▌Youtube:Aerial robotics @ Westlake University
▌实验室网站:https://shiyuzhao.westlake.edu.cn/
相关资讯
更多- 亮相2026大连夏季达沃斯论坛|无距科技电动纵列双旋翼无人机,以硬核创新对话全球
- 喜报 | 星逻小蓝机器人荣膺德国红点奖+法国 FDA 设计大奖
- 蜂巢航宇邀您共赴第四届低空(苏州)产业创新生态大会
- 东莞市2026年全民终身学习活动周正式开幕——共赴终身学习之约
- 城市品牌赋能,智翔助力 | 杭州市民日沉浸式科普,为青少年解锁“飞行第一课”
- 纵横大鹏CW-100参与“应急使命·2026”国家级防汛演习
- 慧明捷资讯|科技赋能应急!慧明捷灭火无人机+照明无人机助力2026四川省“安全宣传咨询日”活动
- 星逻邀您共赴第四届低空(苏州)产业创新生态大会!
- 紫燕F15 + Riegl激光雷达 | 高效完成退渔还湖淤泥软基全域测绘
- 邀请函|云圣智能邀您相约第四届低空(苏州)产业创新生态大会