双RTK测向什么时候用?怎么用?
转载 2022-04-27 11:07 CUAV雷迅创新科技 来源:CUAV雷迅创新科技

无人机在电站、码头、矿场等场景执行任务时,指南针时常会受到外界磁干扰或无人机自身的电磁干扰,此时,为保证无人机正常高效作业,可以通过双RTK测向定位计算出偏航信息,不受指南针情况影响,十分适合复杂多变的磁场环境场景。
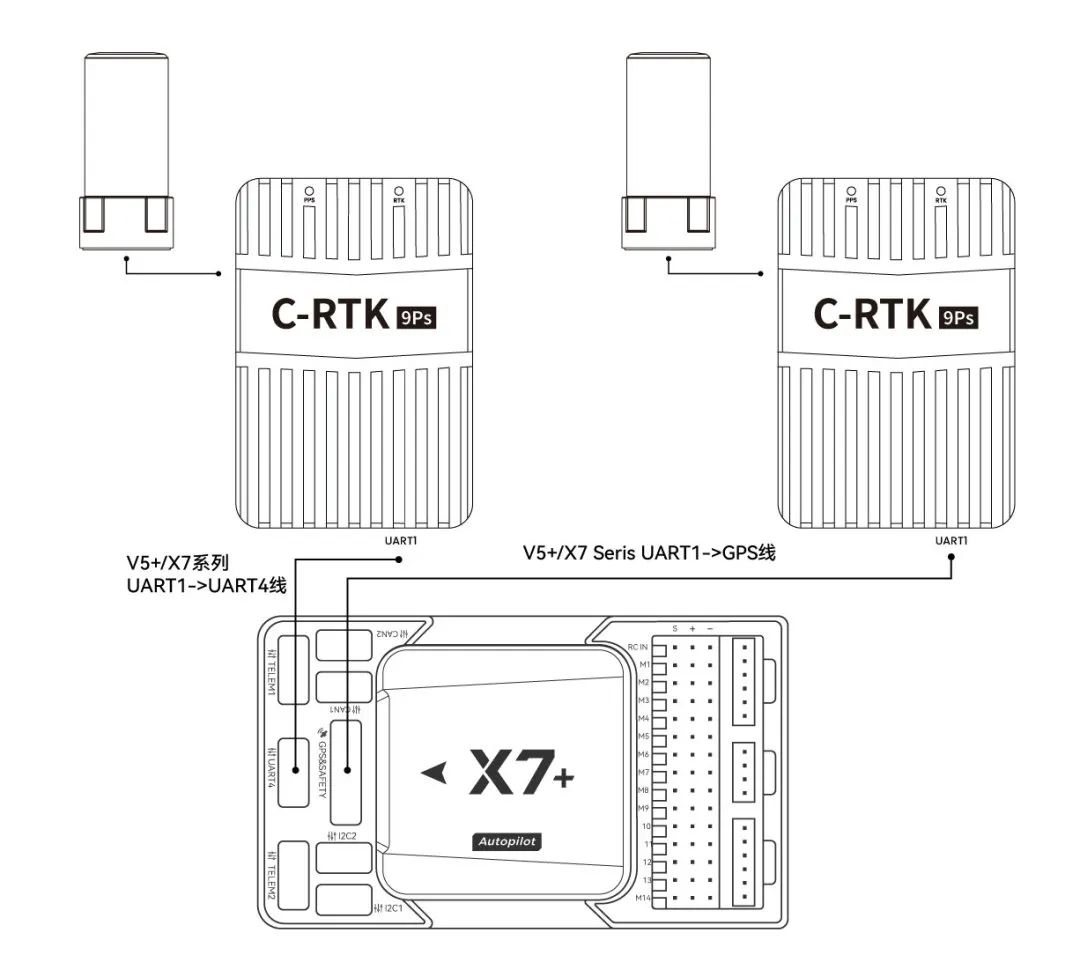
硬件使用:两个C-RTK 9Ps天空端
固件要求:Copter 4.0.4及以上版本,Plane 4.0.6及更高版本Rover 4.1.0或更高版本
01硬件设置
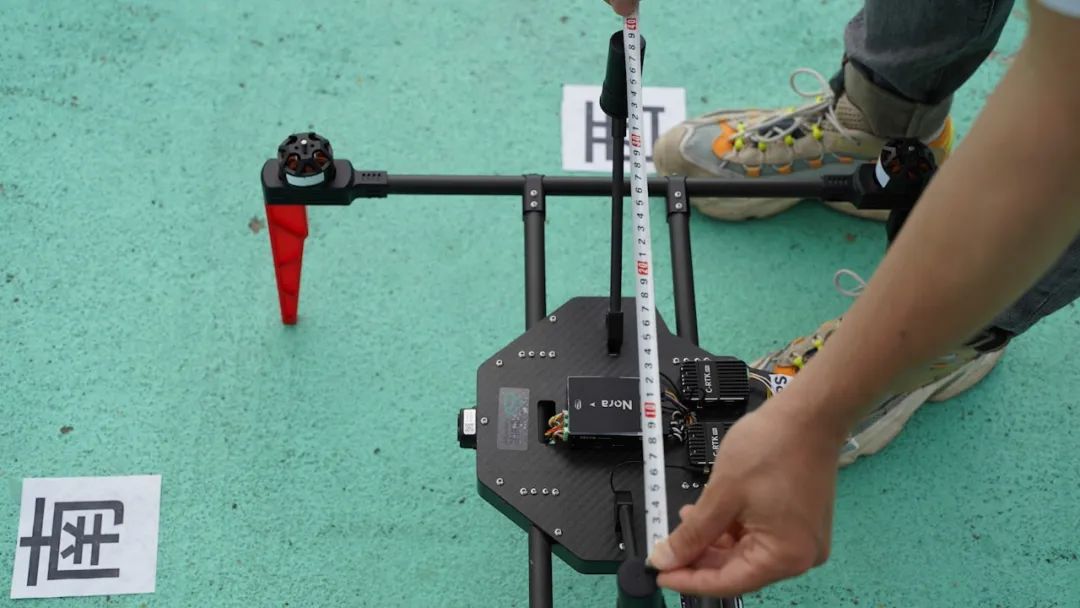
首先将两个RTK 9Ps分别连接至GPS口和UART4端口,两个模块之间安装距离并无要求,但两个天线之间的水平距离须大于30cm。
02地面站设置
-连接地面站,进入全部参数列表;
-设置SERIAL_PROTOCOL=5(UART4的串口协议为GPS);
-设置GPS_TYPE=17;
-设置GPS_TYPE2=18;
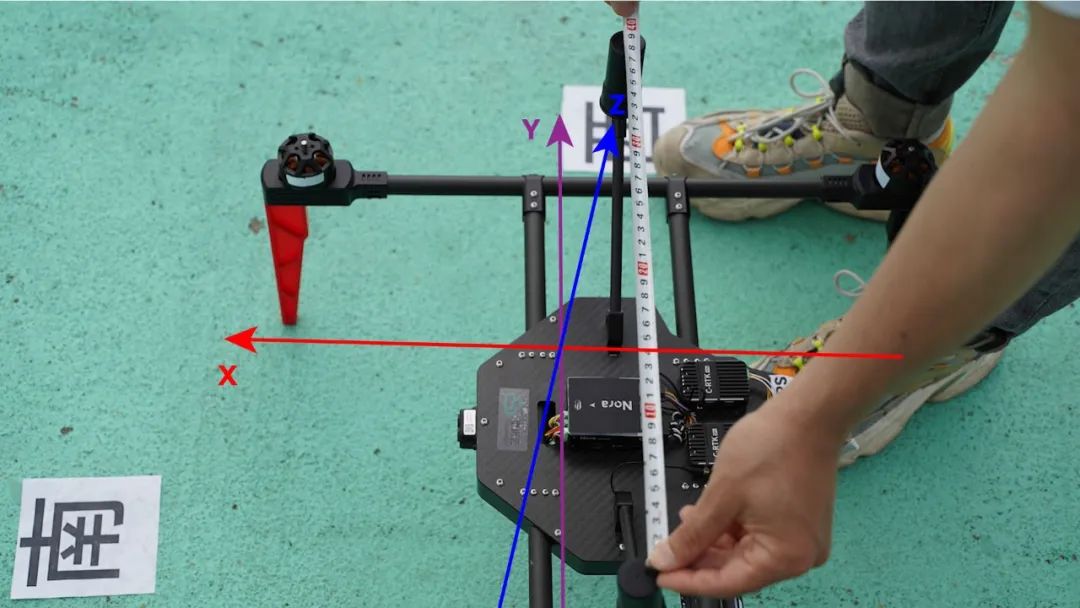
-根据下图设置X、Y、Z的偏移量,将天线安装于Y轴,保持相距39cm,因此设置Y轴偏移0.195m与-0.195m;
-设置GPS_AUTO_SWITCH=1;
-设置AHRS_EKF_TYPE=3;
-设置EK2_ENABLE=0(禁用EKF2);
-设置EK3_ENABLE=1(启用EKF3);
-设置EK3_MAG_CAL=3(0为固定翼,3为多旋翼,2为车或船)。如是4.0固件,则EK3_MAG_CAL设置为5(使用外部偏航传感器);如使用4.1或更高版本,还需设置EK3_SRC_YAW=2或3(2为仅使用双天线测向,3为双天线测向失效后自动切换使用罗盘数据)。
03测向检验
参数设置完毕,写入参数并重启飞控,再次连接飞机,进入消息窗口后可以看到EK3 IMU YAW Aligned的信息,如图所示,表明两个RTK已开始正常工作,即双RTK测向成功生效。

如地面站检查航向与实际相反,则需调换两个RTK的接线或者交换GPS_POS1与GPS_POS2的偏移数值。
此时定位精度仍为单点RTK定位,如需更精确的定位,需要在地面架设地面端以获得厘米级定位。