空中作业机器人都有哪些应用?
转载 2022-05-23 10:31 空中机器人前沿 来源:空中机器人前沿
全文2180字,
预计阅读时间5分钟
原创 | 曹华姿编辑 | 吕嘉玲
在之前的推文中,我们介绍了什么是空中作业机器人。大家知道了空中作业机器人是无人机和机械臂的结合体,一定很好奇空中作业机器人都有什么应用。写这篇文章的目的就是解答大家心中的疑惑。在回答大家的疑惑之前,首先给大家介绍一些背景知识,那就是什么是空中应用,它的类别是什么?再结合空中作业机器人的特点来讲一讲现有的空中作业机器人的应用。
01
空中应用分类
空中应用是指利用空基的设备完成一些特定的任务,这里的空基设备包括无人机和空中作业机器人等。如图 1所示,我们按照交互性强弱把现有的空中应用分为四类:无交互、弱交互、中交互和强交互。这四类的定义分别如下:
无交互是指和环境不存在接触等力交互,这类任务以感知环境为目标,对环境无改变。无交互应用主要包括消费级以及工业级航拍、巡线、监测、测绘等,在过去十年无交互应用是商业争夺最为激烈的领域。
弱交互是指无人机可影响改变环境状态但是不存在强的交互力。弱交互的应用主要包括农业植保、空中物流、飞行汽车。在过去五年和现在,这些领域都出现了激烈的竞争,并且在可以预见的时间内,市场会逐步整合。
中交互是指与环境有频繁的动作交互,其代表的应用包括近些年兴起的无人机消防、喷涂、恶意无人机追捕等。目前在中交互的应用,中小企业逐渐发展、行业落地不断深化。
强交互是指以改变环境状态为目标,与环境有很强的动作和力交互。其主要包含的应用包括高空建筑物接触式检测、安装、清洁等。从市场的角度来说,强交互具有广阔的前景,并且目前强交互相关的企业较少,还处于萌芽状态。

图 1 交互性强弱分类与应用对应关系
02
空中作业机器人特点
空中作业机器人是一种新型的机器人,其兼具无人机的快速空间移动能力和机械臂的精确操纵能力。简单的来说,可以将空中作业机器人看做是无人机和作业机构的结合。具有无人机和作业机构二重能力的空中作业机器人,可以拓展无人机的应用的场景,让无人机实现从“看”向“做”的跨越。

图 2 空中作业机器人
空中作业机器人相较于无人机最大的区别在于其具有精确的操纵能力和环境交互能力,因此空中作业机器人更适合那些交互性强的应用场景。
03
现有的空中作业机器人应用
从任务的角度上看,可以将空中作业机器人的应用分为接触式检测、清洁、喷涂、搬运和操作。
▌接触式检测接触式检测的研究主要侧重于油气管道和桥面的研究,主要用于检测管道的裂纹和桥底的裂纹,便于相关设施的维护。接触式检测主要面向那些需要定期进行定期接触检修(如探伤、检查裂纹等)的场景。并且这些场景因为高度或者环境的特殊性,如果由人去完成,则会存在很大的安全风险并且检测的效率也很低。

图 3 接触式检测 (a)塞维利亚大学开发的油气管道检测机器人[1];(b)ETH开发的桥梁检测机器人[2]
▌清洗关于清洗的研究主要集中在一些较为光滑的表面的清洗,比如墙面、玻璃和光伏电池,目前已经有国外创业公司(如西班牙的CleanDrone公司)从事空中清洗作业机器人方面的研究。

图 4 西班牙的CleanDrone公司将空中作业机器人应用于墙壁和光伏电池的清洗[3]
▌喷涂关于喷涂的研究主要集中在墙面的喷涂和logo的喷涂。瑞士的Voliro公司已经在这个方向进行了一些研究,开发了一款用于墙面喷涂的空中作业机器人,其采用全驱动的飞行平台,可以更为灵活的实现喷涂。除此之外,ETH和迪士尼一起联合开发了用于喷涂绘画的空中喷涂机器人。从目前的效果上看,现有研究的喷涂还只能用于一些对精度要求低的场景,想要进一步扩展应用还需要提高喷涂作业的精度。
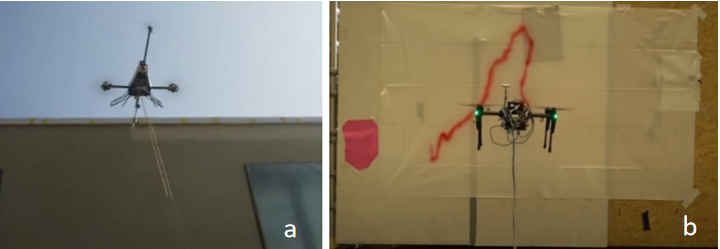
图 5 喷涂(a)瑞士的Voliro公司将空中作业机器人应用于喷涂墙面[4];(b)ETH和迪士尼开发的空中喷涂机器人[5]
▌搬运关于空中作业机器人在搬运方面的研究工作最多。搬运可以分为简单搬运和特殊场景下的搬运,大部分的研究都主要集中在简单的搬运。针对无人机无法直接前往的复杂地形,塞维利亚大学的研究团队将机械臂通过一根缆索和无人机相连,获得的新型空中作业机器人可以在一些复杂地形下完成搬运任务。此外,还有一类特殊的搬运,把一些特殊的物品如传感器搬运到指定的位置。塞维利亚大学团队基于这种思路利用一个四旋翼无人机和一个单连杆机构开发了一款传感器部署机器人,可以实现传感器的部署与回收。
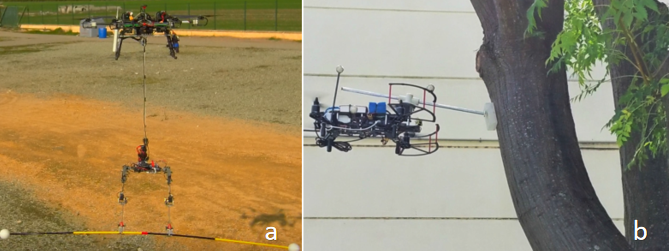
图 6 搬运 (a)塞维利亚大学利用空中作业机器人开发了一套远距离搬运系统[6];(b)西班牙塞维利亚大学的传感器部署机器人[7]
▌操纵关于操纵的研究主要集中在按钮、阀门和门等物品的操纵上,这类应用充分利用了空中作业机器人的高精度操纵能力和物理交互能力。目前,这方面的应用吸引了大量研究者的目光。这方面的研究主要集中在如何提供足够的操纵力?如何实现相应的操纵?等等。

图 7 操纵 (a)ETH开发的拧阀门空中机器人[8];(b)首尔国立大学开发的开门机器人[9]
04
总结
空中作业机器人的特点是兼具无人机和作业机构的二重特性,使得其相较于传统无人机拥有更强的交互能力、更高的操纵精度、更高的可扩展性。这些特点可以让空中作业机器人去完成更多的任务,同时不同的任务对空中作业机器人也提出了不同的要求,这要求了空中作业机器人要依据任务来进行开发。
空中作业机器人是否具有商业价值呢?答案一定是肯定的,空中作业的优势是可以将人类从一些高危的工作中解放出来的,另外它也能提高生产或者维护的效率。但是,从目前的应用上来看,还有很多的技术问题需要进一步解决,离真正的落地且商业化应用还有一定的距离。
参考文献
[1] M. Á. Trujillo, J. R. Martínez-De Dios, C. Martín, A. Viguria, and A. Ollero, “Novel aerial manipulator for accurate and robust industrial NDT contact inspection: A new tool for the oil and gas inspection industry,” Sensors (Switzerland), vol. 19, no. 6, 2019, doi: 10.3390/s19061305.
[2] K. Bodie et al., “An Omnidirectional Aerial Manipulation Platform for Contact-Based Inspection,” 2019, doi: 10.15607/rss.2019.xv.019.
[3] Cleandrone. http://www.cleandrone.com/.
[4] Voliro. https://www.voliro.com/solution/.
[5] A. S. Vempati et al., “PaintCopter: An autonomous UAV for spray painting on three-dimensional surfaces,” IEEE Robot. Autom. Lett., vol. 3, no. 4, pp. 2862–2869, 2018, doi: 10.1109/LRA.2018.2846278.
[6] Suárez A, Sanchez-Cuevas P, Fernandez M, et al. Lightweight and compliant long reach aerial manipulator for inspection operations[C]//2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). IEEE, 2018: 6746-6752.
[7] S. Hamaza et al., “Sensor Installation and Retrieval Operations Using an Unmanned Aerial Manipulator,” IEEE Robot. Autom. Lett., vol. 4, no. 3, pp. 2793–2800, 2019, doi: 10.1109/LRA.2019.2918448.
[8] H. Nguyen and K. Alexis, “Forceful Aerial Manipulation Based on an Aerial Robotic Chain: Hybrid Modeling and Control,” IEEE Robot. Autom. Lett., vol. 6, no. 2, pp. 3711–3719, 2021, doi: 10.1109/LRA.2021.3064254.
[9] D. Lee, H. Seo, D. Kim, and H. J. Kim, “Aerial Manipulation using Model Predictive Control for Opening a Hinged Door,” Proc. - IEEE Int. Conf. Robot. Autom., pp. 1237–1242, 2020, doi: 10.1109/ICRA40945.2020.9197524.