穿越机失步原因及解决方法
转载 2022-07-04 10:23 飞盈佳乐 来源:飞盈佳乐
视频讲解
近期很多模友咨询失步、翻滚等问题;
那本期来聊聊失步是什么?为什么会失步?
要如何解决或降低失步出现的几率?
*注:本期大部分内容来自百度及各位模友、用户的分享
言归正传,进入本期主题。首先说说为什么会出现失步?
我们穿越机用的电机为无感直流无刷电机,依靠电调解算反向电动势,判断转子位置从而按正确的时序开关多相线圈。
而反向电动势的大小依靠转速的大小,在低转速时,反向电动势就小,当反向电动势夹杂着大量的噪音导致反向电动势的信噪比小于一个阈值时,电调就不能正确地判断出转子的位置。
转子位置预测不准,则多相线圈开关速度就会和转子实际旋转速度不同,导致失去同步,出现电机抽搐或停转等情况。
所以这就是为什么有时推大油门飞机会出现抽搐、侧翻、甚至出现“SW翻滚”等现象。
下面来聊聊都有哪些方法:
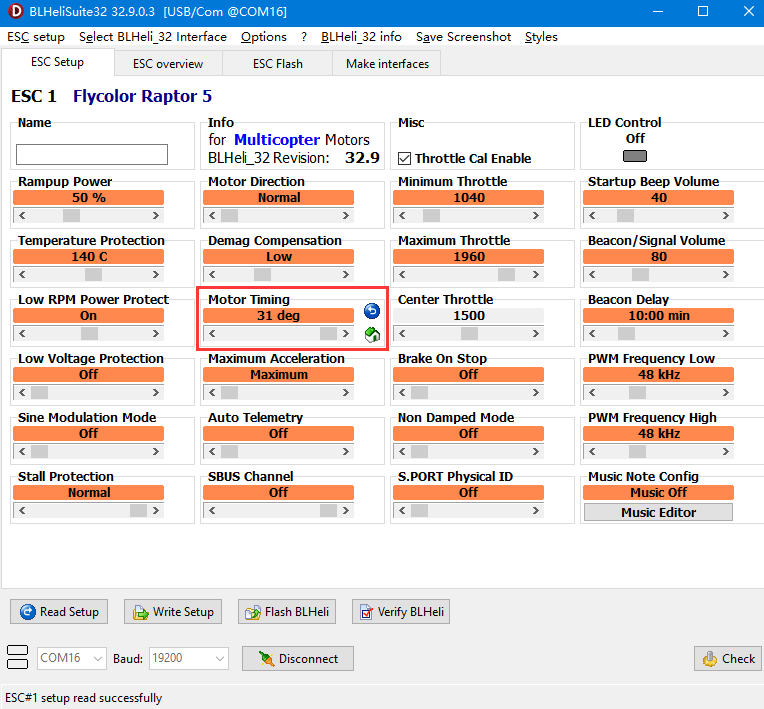
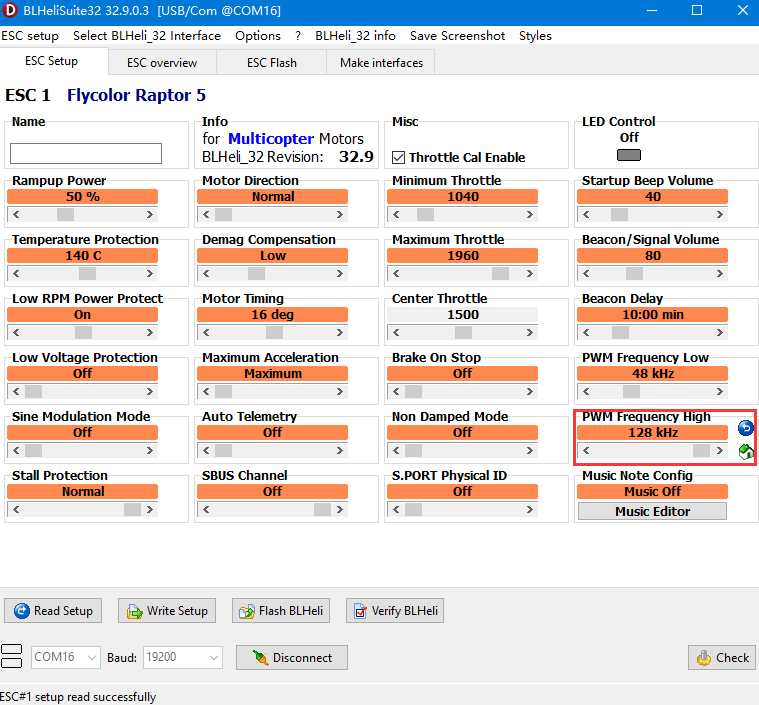
1、加大进角(Motor timing),最大值可调至31°。
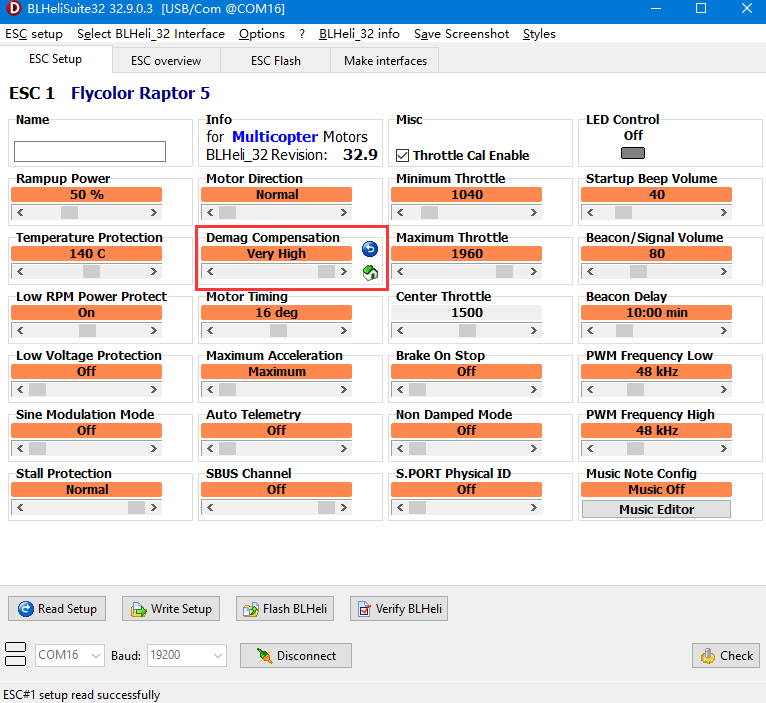
2、加大退磁补偿(Demag Compensation),可调至最大
3、加大PWM频率(PWM Frequency),调到最大值

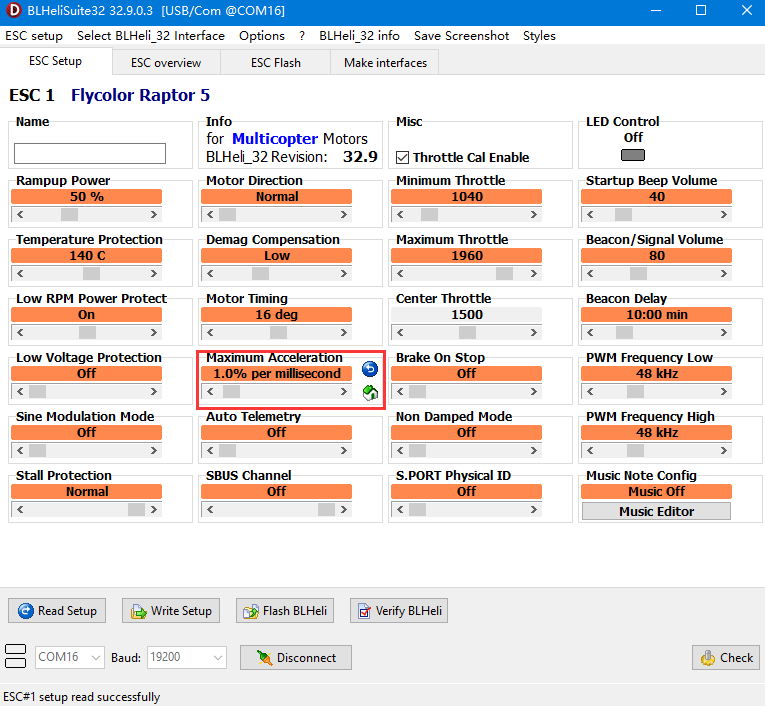
4、减小加速功率(Rampup Power),此选项一般不建议调整,会一定程度影响操作手感。
5、在BF中打开双向D SHOT选项。

6、如按以上方法还无法解决,建议更换PWM频率支持96、128K的电调。

相关资讯
更多- 加速协同创新,蜂巢航宇加入长三角产教融合共同体
- 技术破局,智护危化|鲲鹏智汇亮相大湾区交流会,分享硬核解决方案
- 一网统飞找灵犀,灵犀智联低空区|卓翼智能低空政务一网统飞解决方案,赋能数字政务新范式
- 光谷商学院首期“卓越班”学员莅临普宙科技参观考察
- 喜报!甘肃陇原云图在2026数字中国创新大赛中斩获双奖
- 【精飞集团】郴州市政府考察团调研精飞集团 共绘低空经济发展蓝图
- 4月28日,智航华强北全球招商启动!
- 展会回顾 | 昊舜视讯亮相2026全球无人机&无人机系统产业博览会
- “打造全国首个无人机理赔示范区”工作协调推进会在普宙科技召开
- 星逻智能亮相2026江苏光伏创新发展大会,荣获“卓越智能运维企业”奖