无人机教程 | 垂直起降无人机多轴自动调参
转载 2022-09-19 10:22 CUAV雷迅创新科技 来源:CUAV雷迅创新科技
本期教程利用Lua脚本实现5-150公斤垂直起降无人机多轴自动调参,自适应PID调参,代替“手动调参”过程,已在多台起飞重量为50-150公斤的垂起中验证完毕,对比原多轴自动调参更加安全可靠。
该脚本为QLOITER模式下用于四翼无人机或LOITER模式用于多轴无人机设计,但也可以在其他VTOL模式下使用。
参数设置
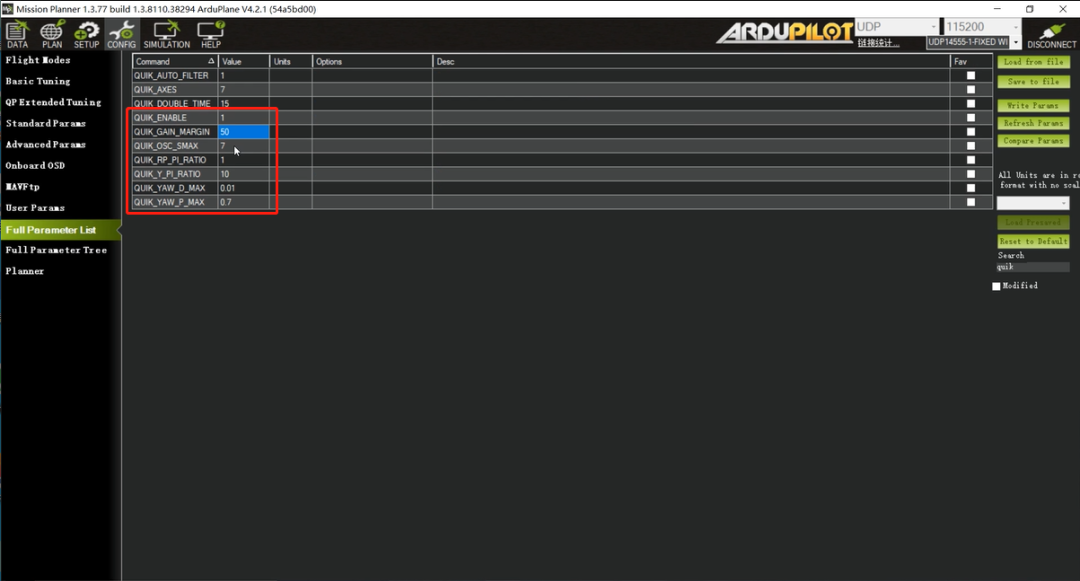
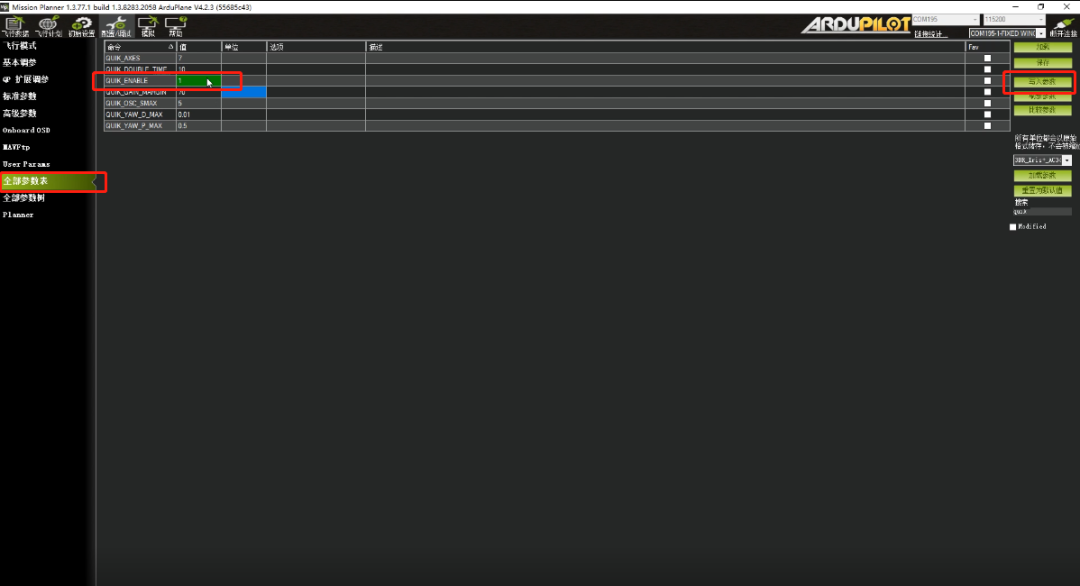
QUIK_ENABLE设置为1,表示启用脚本。
QUIK_AXES默认值为 7,表示滚动、俯仰和偏航。如果只需滚动和俯仰,设置为3,只需偏航,则设置为4。
QUIK_DOUBLE_TIME默认值为10(秒),表示可以控制调参时增益的提高速度。
QUIK_GAIN_MARGIN默认值为70%,表示要使用的百分比增益裕量,一旦找到增益的振荡点,增益就会降低此百分比。
QUIK_OSC_SMAX默认值为5(Hz),表示赫兹的振荡阈值,用于检测增益升高时的振荡。50kg的无人机,值为3可能更适合,100kg的无人机,值为1.5可能更适合。如果参数调整完后仍有明显振荡,可以判断是此参数设置过高,这时应将此参数减半,然后重试。
QUIK_YAW_P_MAX最大设置为0.5,适用于大多数垂起无人机。
QUIK_YAW_D_MAX最大设置为0.01,适用于大多数垂起无人机。
具体操作
01
启用谐波陷波滤波器(点击蓝字即可查看教程),该调参系统需要开启谐波陷波滤波器降低陀螺仪噪音后才能进行,噪音太高将无法使用。
02
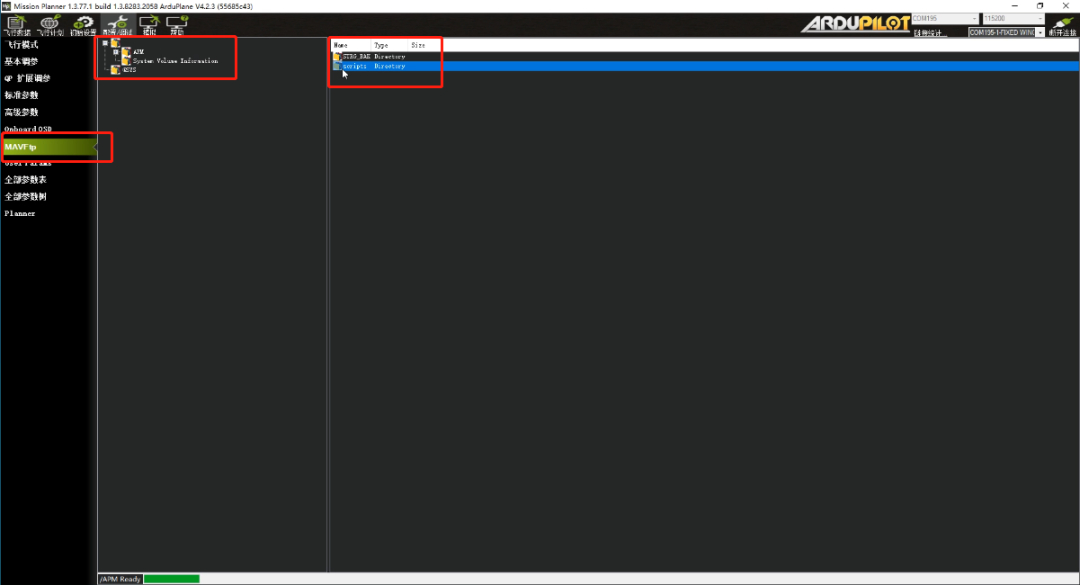
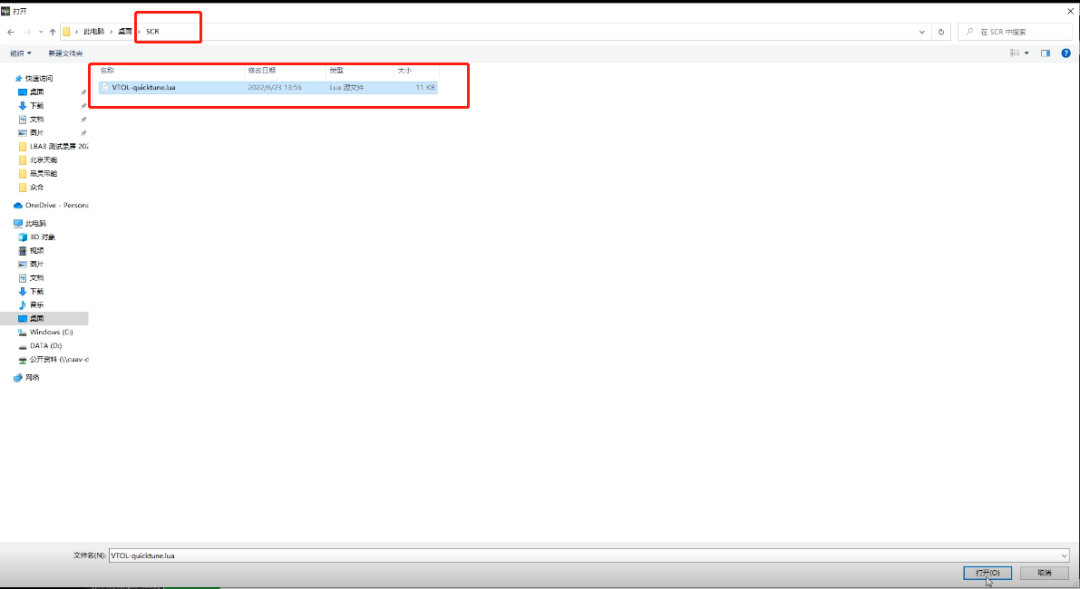
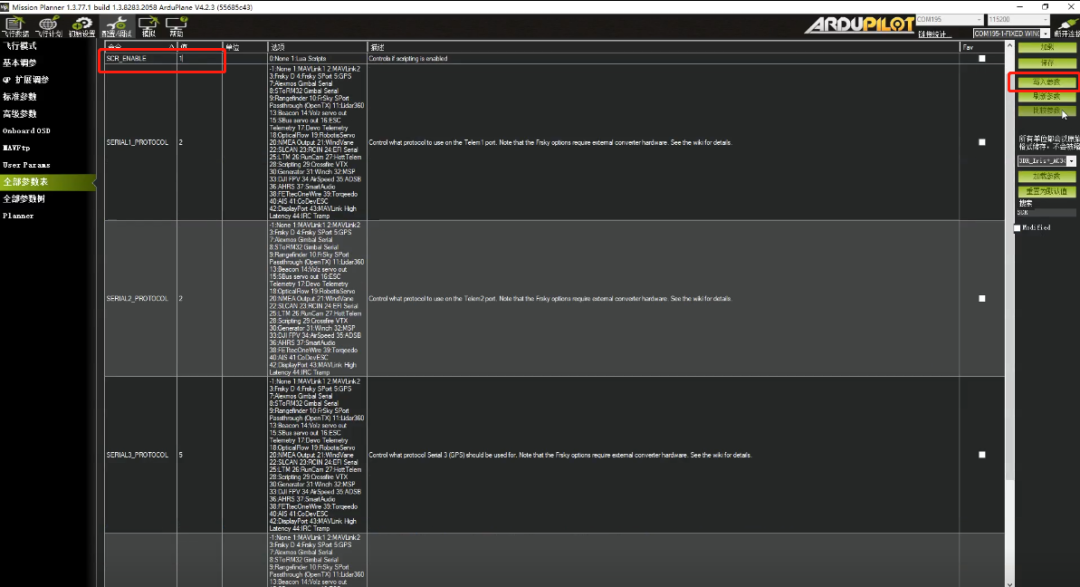
将Lua脚本(后台回复“脚本”即可获取)安装在飞控MicroSD卡的APM/SCRIPTS目录中,将SCR_ENABLE设置为1,重新启动并刷新参数,然后将QUIK_ENABLE设置为1。
03
在可用的RC输入通道上设置一个3位开关来控制调参。例:如果通道6可与3位开关一起使用,则应设置 RC6_OPTION="300以将调参控制与该开关相关联。
04
将无人机设置为QLOITER模式(四翼)或LOITER模式(多轴),并使其在低风中稳定悬停。
05
将步骤03中选用的通道控制开关移动到中间位置,开始调整过程,此时可以在地面站上看到显示调参进度的信息。
06
当使用默认设置时,则自动调参会依次调整以下参数:RLL_D,RLL_P,PIT_D,PIT_P,YAW_D,YAW_P。
07
当地面站提示“Tuning Done”则表示调参完成,此时将开关拨到高位来保存参数,保存参数时地面站将提示“Tuning Save”表示参数保存完成。若开关拨到低位,则不保存此次参数,所有参数将恢复为原始值。
Lua调参完毕,进行暴力打杆测试PID稳定性(该操作具有危险性,请勿随意模仿)。从视频中可以看出,本次调参效果良好,说明自动调参有效。
相关资讯
更多- 气象服务新范式 赋能千行百业 | 中科星图“看天・预见未来气象服务产品发布会”成功举办
- 锁定「看见三亚」:千机科技邀全球品牌共舞海南夜空,独享亿级流量入口
- 民航局就限用类无人机及动力提升航空器适航标准公开征求意见
- 预告:66架电动飞机已下单,即将空降您身边的飞行主题乐园
- 全国首个!云圣智能低空大模型完成双备案,“AI+低空”赋能新场景
- 全国首个低空共享无人机示范区飞行架次首破10万
- 地面机器人尽管受到欢迎,但乌克兰利用其执行任务不到其无人机总任务量的1%
- 世界最小的可编程、全自主机器人在美问世
- Sunflower Labs 获1600万美元B轮融资,致力把无人机安防从概念推向规模化落地
- Packet Digital获得美国防部5000万美元锂电订单