无网作业新功能上线,你用上了吗?
转载 2023-02-16 10:00 极飞服务 来源:极飞服务
打开极飞农服 App (简称 App)启动作业时,你是否因手机信号栏上显示的无网/弱网状态而忐忑?
一直以来,由于部分作业区域位置较为偏远,网络信号都不太好,而畅通的网络又是农业无人飞机顺利作业的前提,所以在过去,无网地区的用户都难以享受到农业无人飞机的高效服务。
针对无网地区作业,今年我们向大家推出无网作业新功能,大家在无网环境下也能畅飞无阻,从而更方便地使用农业无人飞机进行作业。

*此功能适用于极飞 2023 款 P100 Pro、V50 Pro、P100、V50 四种机型。
01
关于无网作业
无网作业可以在完全没有网络的环境下,也能实现农业无人飞机全流程作业的闭环:组建网络-地块测绘-航线规划-飞行作业-生产作业报告。
那它是如何实现的呢?
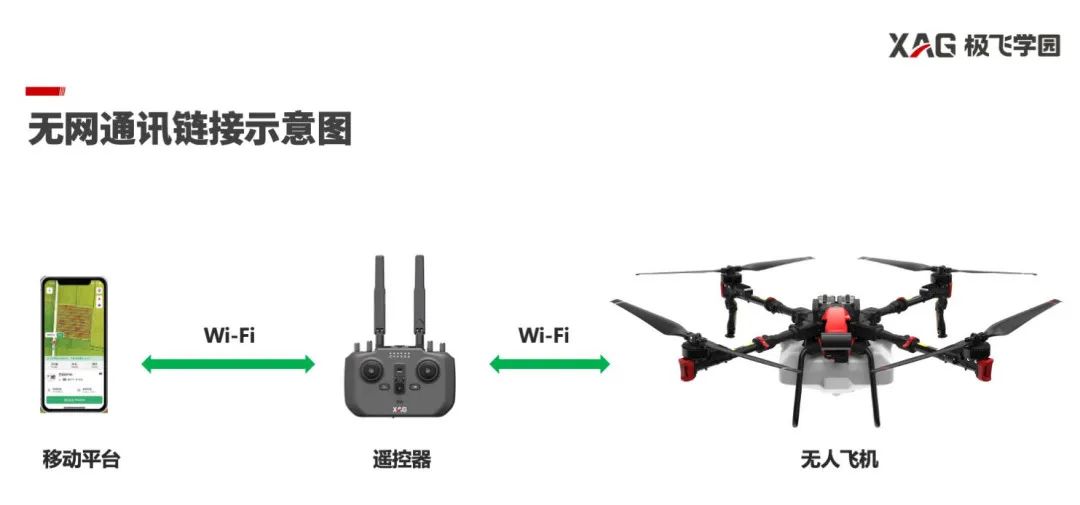
通过使用 ACS2/ACS3 单手遥控器或 ARC3 Pro 双手遥控器作为网络桥接设备,无人飞机与手机连接遥控器 Wi-Fi 组建临时局域网,形成通信链路,完成无网环境下的全流程作业。
*无网作业下,定位精度可能受到一定影响,操控农业无人飞机时需时刻注意田间状况,如出现定位偏差注意及时接管,避免发生安全事故。
02
无网作业如何使用?
使用无网作业的前提条件为:无人飞机与遥控器需先在 App 上完成设备添加。
那在使用无网作业新功能中最重要的一步就是:怎么让设备能够通过 App 去绑定设备和组网,以下将通过 2 个使用场景,给大家介绍2种使用的方法。
场景一 作业设备已绑定,但作业地没网
解决方法:
用户可以用手机连接遥控器发出的 Wi-Fi 热点,即可通过 App 进行飞行作业。
操作步骤:
打开手机 Wi-Fi 功能,连接遥控器热点,热点名称为遥控器序列号,初始化密码为 20070401。
场景二 作业设备绑定时无网,作业地也没网
解决方法:
用户可通过使用遥控器配网功能,让遥控器与附近的 Wi-Fi 网络进行配网,再将无人飞机与遥控器组网。
操作步骤:
1.点击“我的”-“设备”,进入“设备详情”界面,选择右上角“⋮”,点击“遥控器配网”-“无人机”,需根据 App 页面指引进行操作。
2.打开手机 Wi-Fi 功能,连接遥控器热点,热点名称为遥控器序列号,初始化密码为 20070401。

3. 将无人飞机和遥控器进行绑定。

03
无网作业与 VRTK 模式
无网作业下,定位精度可能会出现偏差,建议大家在 App 上打开虚拟 RTK 定位,即 VRTK 模式,确保作业定位精准。
操作路径:
在 App 上点击“我的”-“设备”——进入“设备详情”界面——选择待作业的设备——点击 “RTK 定位”——选择“RTK 基准源”——选择“VRTK 定位”模式。
使用 VRTK 模式作业时的注意事项
1. 测绘前应观察作业地块场景,如地块过于复杂或周边存在明显遮挡物将影响定位效果,不建议使用 VRTK 模式测绘。
2. 使用 VRTK 模式测绘时,需始终保持当前遥控器 RTK 差分定位模块是朝上状态。
3. 若测绘时使用了 VRTK 模式,在开始作业前应对作业地块进行地块纠偏。
4. 使用 VRTK 模式作业时,建议尽量在 2 小时内完成地块测绘及作业。
5. 使用 VRTK 模式作业时,若无人飞机在同个地块作业过程中出现断电冷重启的情况,则需重新进行地块纠偏。
知识拓展
此外,在 VRTK 模式下进行地块测绘或作业时,我们都需提前对作业地块进行地块纠偏。
我们可以通过特征点进行纠偏,操作步骤如下:
第一步: 点击选择纠偏特征点
我们在规划完地块之后,在 App 上选择地块,进入地块纠偏页面,选择一个特征明显的地方,做为特征点。
第二步:纠正无人飞机到特征点位置
通过遥控器或人工搬抬的方式将无人飞机移动到特征点所在位置。
第三步:执行地块纠偏操作
点击“纠偏到无人飞机”按钮,将地块纠偏到无人飞机位置,完成地块纠偏操作。
还想了解更多?
敬请关注!
