Avestec首次使用空中机器人在有限空间内进行非进入超声波测试 (UT) 检查
原创 2023-08-24 09:24 Mulan 来源:AGV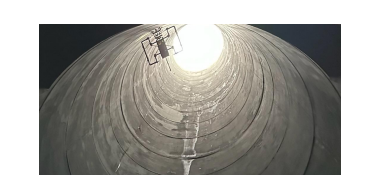
首次使用空中机器人进行非进入限制空间超声波厚度检查。
在无损检测 (NDT) 领域,专家们不断寻求改进检测操作,以提高效率、准确性,尤其是安全性。最近,加拿大Avestec公司 和 Acuren 通过使用空中机器人在密闭空间内进行首次非进入超声波测试 (UT) 检查,实现了一个重要的里程碑。这一成功的应用是在检查加拿大西部一家炼油厂的烟囱时发生的。
烟囱的内部非常容易受到损坏,由于其有限的性质,检查该区域面临着许多挑战。在这些检查过程中,有限的通道是主要障碍,因为堆栈设计有狭窄的通道和狭小的空间,阻碍了检查员的进入和移动。这些限制极大地限制了堆栈内部的物理访问和可操作性。
内部烟囱检查的另一个挑战是可见度有限。密闭空间缺乏适当的照明且能见度有限,这使得检查员难以准确评估内墙或识别潜在缺陷。可见度不足会影响检查的有效性,需要替代的先进方法来克服这一限制。
时间和成本是烟囱检查中需要考虑的重要因素。传统的检查方法通常需要大量的停机时间和资源。出于检查目的而关闭堆栈可能会扰乱生产并导致财务损失。因此,找到在保持检查质量的同时最大限度地减少停机时间和降低成本的替代方法至关重要。

为了解决与检查烟囱内部相关的挑战,Avestec 通过使用空中机器人进行首次非进入超声波测试 (UT) 检查,成功实施了解决方案。这次开创性的检查是在一个高 50 米、直径 4 米的狭窄烟囱内进行的。与需要人员进入密闭空间的传统方法不同,Avestec 选择了完全远程的非进入操作,以确保安全并克服后勤复杂性。
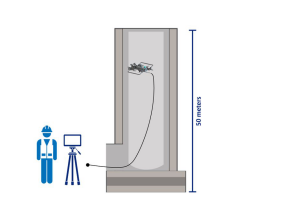
在UT检查期间,飞行员和检查员在密闭空间之外的位置操作空中机器人。为了促进无缝通信和数据传输,通过有线中继建立了各种通信链路。其中包括飞行和导航系统、用于视觉监控的飞行员 TPV(第三人称视角)和 FPV(第一人称视角)、检查员视频输入和检查员机器人控制。通过利用这些通信链路,团队能够从堆栈内部收集有价值的数据,同时确保检查过程的安全性和效率。

在UT检查期间,飞行员和检查员在密闭空间之外的位置操作空中机器人。为了促进无缝通信和数据传输,通过有线中继建立了各种通信链路。其中包括飞行和导航系统、用于视觉监控的飞行员 TPV(第三人称视角)和 FPV(第一人称视角)、检查员视频输入和检查员机器人控制。通过利用这些通信链路,团队能够从堆栈内部收集有价值的数据,同时确保检查过程的安全性和效率。

空中机器人巡检取得了显著成效。在 64 分钟的飞行时间内,我们精心捕获了总共 76 次 UT 测量结果。这种卓越的数据采集效率和速度凸显了在有限空间检查中使用空中机器人的巨大潜力。
相关资讯
更多- 气象服务新范式 赋能千行百业 | 中科星图“看天・预见未来气象服务产品发布会”成功举办
- 锁定「看见三亚」:千机科技邀全球品牌共舞海南夜空,独享亿级流量入口
- 民航局就限用类无人机及动力提升航空器适航标准公开征求意见
- 预告:66架电动飞机已下单,即将空降您身边的飞行主题乐园
- 全国首个!云圣智能低空大模型完成双备案,“AI+低空”赋能新场景
- 全国首个低空共享无人机示范区飞行架次首破10万
- 地面机器人尽管受到欢迎,但乌克兰利用其执行任务不到其无人机总任务量的1%
- 世界最小的可编程、全自主机器人在美问世
- Sunflower Labs 获1600万美元B轮融资,致力把无人机安防从概念推向规模化落地
- Packet Digital获得美国防部5000万美元锂电订单