新品测试报告:MS600 V2+MS600 Dual级联多光谱相机(附多场景源数据资源)
转载 2023-10-30 10:57 长光禹辰 来源:长光禹辰
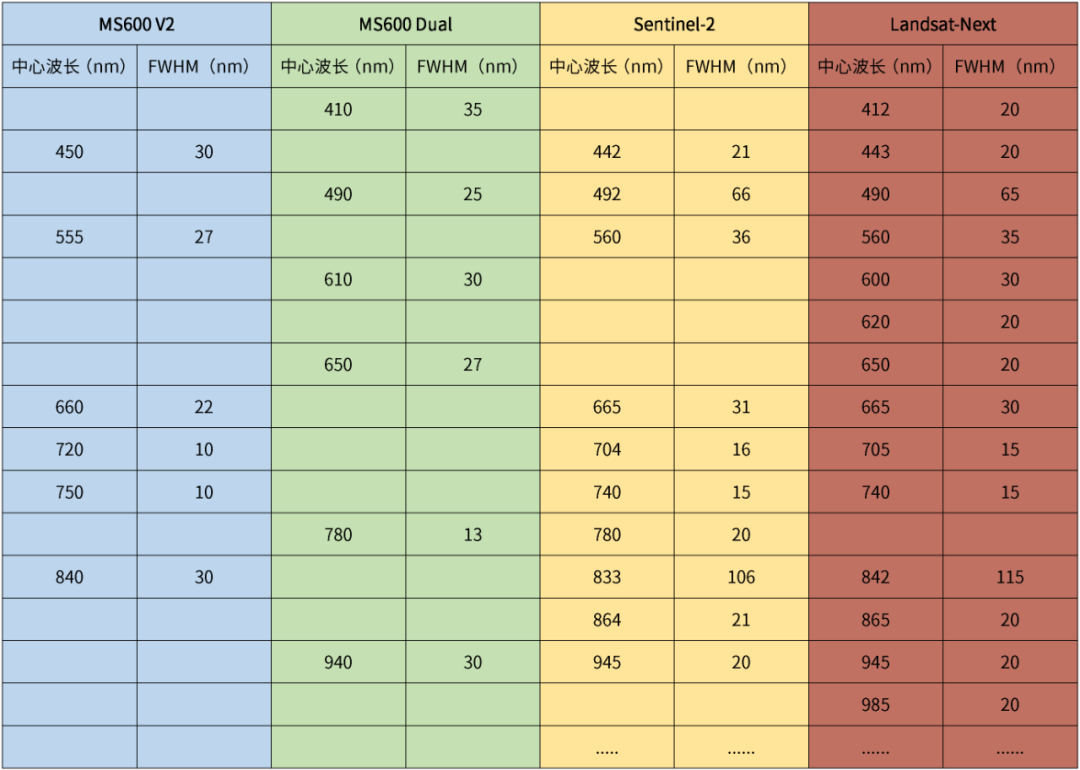
MS600 Dual多光谱相机保持了与目前Sentinel-2与Landsat-Next等主流卫星波段设计的一致性(MS600 Dual多光谱相机发布),其与MS600 V2组成的级联多光谱相机,可单次获取12波段多光谱影像,最大程度保证了农业、林草业、生态环境等领域科研学者对星载、机载光谱数据的信息统一,也为空-地光谱数据验证、光谱遥感平台差异化研究提供硬件支撑。
MS600 Dual多光谱相机除光谱外其他成像参数与MS600 V2一致,搭配一体化快速集成套件可直接挂载M300/M350无人机或CA400多光谱遥感系统,可便捷、快速获取12波段遥感数据。


级联多光谱遥感系统
1、农业场景
1.1外业情况

M350RTK-MS600V2+MS600 Dual 无人机载多光谱遥感系统
飞行作业效率表

1.2多光谱相机设置
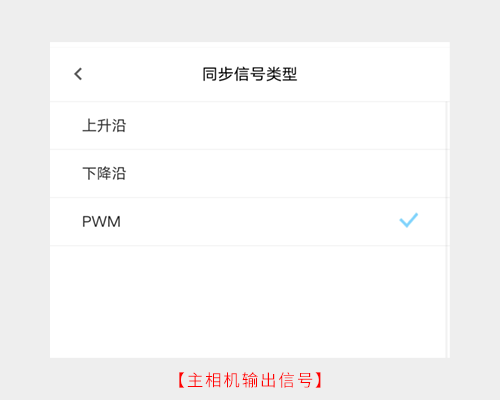
搭载M350 RTK无人机时,主相机的捕获模式需设置为重叠率触发,由DLS计算拍照间隔;同时保证主相机的同步信号类型与从相机的捕获模式一致。(同步信号类型内pwm模式的触发脉宽阈值默认为1.5ms)


相机web端设置

飞行参数
1.3 数据及成果

光谱曲线特征
2、公园场景
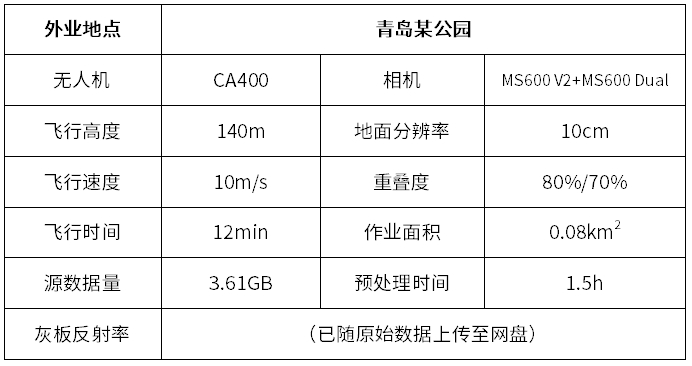
2.1外业概况

CA400-MS600V2+MS600 Dual 无人机载多光谱遥感系统
飞行作业效率表
2.2多光谱相机设置
搭载CA400无人机时,主相机的捕获模式可设置为下降沿,接收飞控的触发信号;同时保证主相机的同步信号类型与从相机的捕获模式一致。(同步信号类型内pwm模式的触发脉宽阈值默认为1.5ms)

相机web端设置

飞行参数
2.3数据成果

3、森林场景
3.1外业概况

CA400-MS600V2+MS600 Dual 无人机载多光谱遥感系统
飞行作业效率表

3.2多光谱相机设置
搭载CA400无人机时,主相机的捕获模式可设置为下降沿,接收飞控的触发信号;同时保证主相机的同步信号类型与从相机的捕获模式一致。(同步信号类型内pwm模式的触发脉宽阈值默认为1.5ms)

相机web端设置

飞行参数
3.3 数据成果
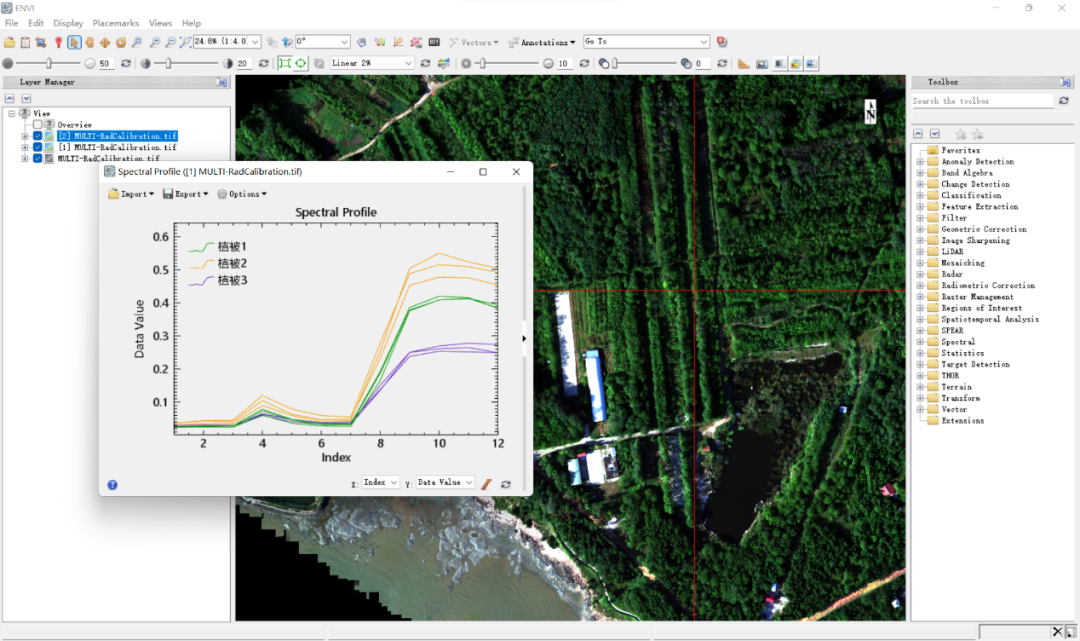
光谱曲线特征
4、河道场景
4.1外业概况

M350RTK-MS600V2+MS600 Dual 无人机载多光谱遥感系统
飞行作业效率表

4.2多光谱相机设置
搭载M350 RTK无人机时,主相机的捕获模式需设置为重叠率触发,由DLS计算拍照间隔;同时保证主相机的同步信号类型与从相机的捕获模式一致。(同步信号类型内pwm模式的触发脉宽阈值默认为1.5ms)

相机web端设置

飞行参数
4.3 数据及成果

光谱曲线特征
5、测试总结
MS600 Dual+MS600 V2组成的级联12波段多光谱相机,既可提升外业数据获取效率,避免同一地区飞行2次繁琐的外业工作,同时长光禹辰自主研发的多光谱数据预处理软件Yusense Map可实现12波段数据同步处理,保证了不同波段影像间的像素级配准,简化数据处理流程,提高数据分析阶段对同一目标的光谱信息获取的准确性,是科研学者进行植物表型分析、水环境反演、复杂地物分类、空-天数据一致性分析等研究的首选装备。
关于我们
长光禹辰成立于2017年,是一家由中国科学院长春光机所和青岛高新区联合成立的高新技术企业,公司核心团队来自长春光机所空间光学部,在光谱遥感、光电探测领域具有深厚的理论基础和丰富的工程经验,掌握完整的光谱仪器系统设计、先进的嵌入式视觉开发、复杂场景定量遥感智能调光、高精度自动辐射校正、光谱数据半定量反演及应用等核心技术,形成了以MS200、MS400、MS600、AQ300、AQ600等系列多光谱相机为代表的无人机载光谱遥感硬件产品线,提供Wifi Web、DJI Pilot等多种相机参数设置及控制方式,依托Yusense Map/Map Plus光谱数据预处理及分析软件、Yusense Cloud端云一体化服务平台,在农业、林业、生态、环保、警用等领域开展了深入的行业应用。公司专注于无人机航空遥感与光电探测领域,持续推出革新的软硬件产品,落地更丰富的行业应用场景,致力于用技术和产品推动行业进步。
相关资讯
更多- 慧明捷资讯|慧明捷全程护航“畅通胶东·2026应急通信保障演练”
- Prime Air再拓美国城市:亚马逊无人机配送进入克利夫兰,低空物流竞争转向多城市复制
- 从爱尔兰飞向美国都市:Manna在Tulsa启动首个完整城市级无人机配送运营基地
- 重载无人机驰援雪域高原!容祺KTZ3列装云南迪庆消防,科技重塑高原救援新战力
- 迎汛而上,空中巡防丨低空遥感赋能多地防台应急
- 重大突破!宏图一号四星编队SAR攻克热带雨林监测难题 国产卫星赋能全球森林碳汇核算
- 扬帆“十五五”,开启低空经济新篇章
- 央视新闻联播聚焦深圳福田无人机AI新应用
- 国产“Lattice OS”——天枢OS | 直面“低慢小”蜂群威胁,以群反群重塑低空防御体系
- 云卓科技|以科技启迪成长,以责任守护未来