重磅迭新 | 飞马机器人激光雷达一站式数据处理软件「智激光」新版发布,数据处理性能再升级!
转载 2024-11-01 09:58 飞马机器人 来源:飞马机器人

「智激光」是适配飞马无人机激光雷达的一站式数据处理软件。它能够高效处理无人机激光雷达采集的距离、位置和姿态等原始数据,生成符合设计精度要求的点云数据。该模块可提供包括海量点云组织管理、点云数据解算,设备检校,优化平差,海量点云可视化,点云数据分析质检,标准点云输出等核心功能,以其强大的数据处理能力为无人机激光雷达数据的高效处理与分析提供强有力的支持。
核心优势
支持海量点云数据导入、浏览、分析
支持点云数据一键式解算、赋色、去噪、优化等处理
支持点云2D、3D、剖面点云查看
支持多种渲染模式切换,且支持EDL、透视模式渲染
支持高效的平差优化、精度控制和质量检查
本次「智激光」版本更新基于软硬件一体化的产品理念,以客户需求为出发点,并从长远角度考虑,软件界面兼容后续全系列激光雷达数据的一键式导入及解算。同时,针对软件多个关键功能进行优化升级,主要包含优化平差、点云纠正等功能,且软件处理效率进一步提升。
▶▶▶▶ 具体更新内容参考如下:
01
【新建工程】功能优化
为了降低功能复杂度,提高使用效率,飞马研发对【新建工程】界面进行了如下重构,以实现后续数据的一键添加及解算处理。
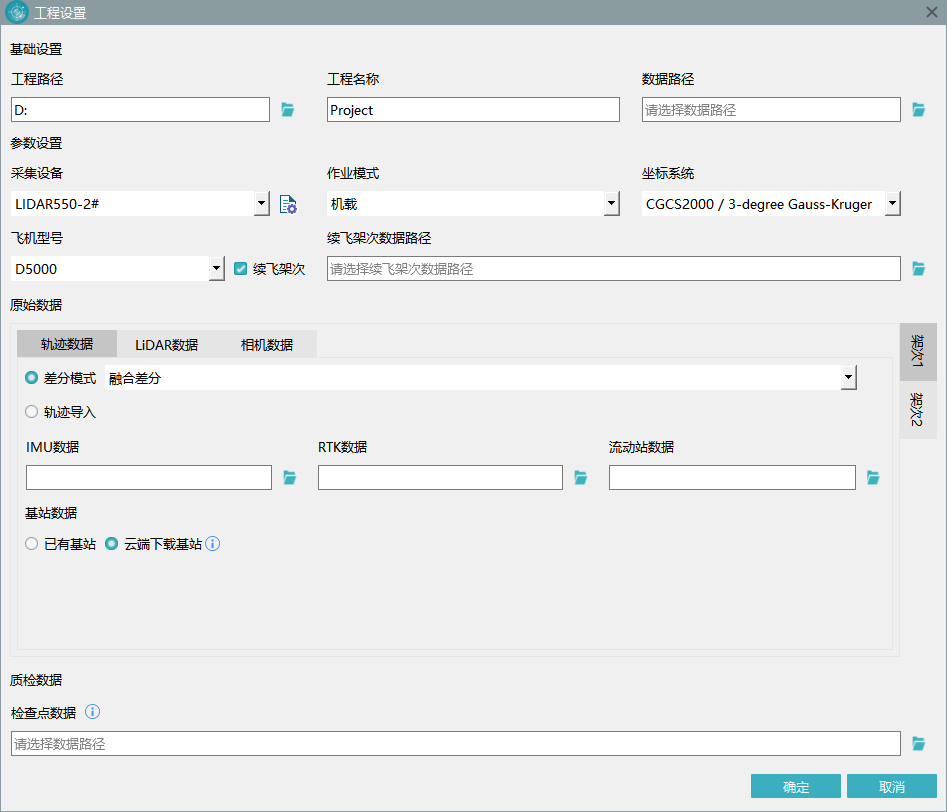
新建工程功能界面
功能更新说明:
【数据路径】&【续飞架次数据路径】为机载激光雷达原始数据一键导入的预留接口,待固件陆续上线后,即可实现数据的一键加载,敬请期待。
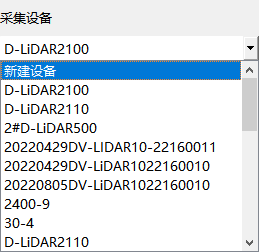
【新建设备】功能更新在【采集设备】列表中的首行位置,其余操作与原逻辑保持不变。
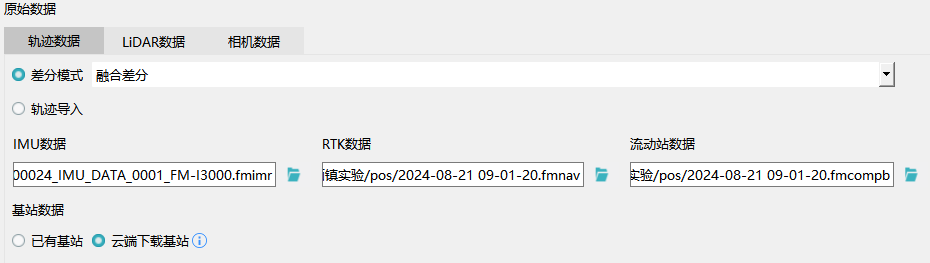
D-LiDAR2100&2200、D-LiDAR2110&2210、D-LiDAR2300&2400、D-LiDAR550直接加载【流动站数据】,无需转换RINEX格式,且可以在智激光中实现云端基站的自动下载。
【检查点数据】在创建工程时即导入对应的检查点数据文件,解算的同时即可输出精度检查报告文件(解算时选择【质量检查】),输出路径为:“工程目录ResultDataReportAccuracy report.pdf”。

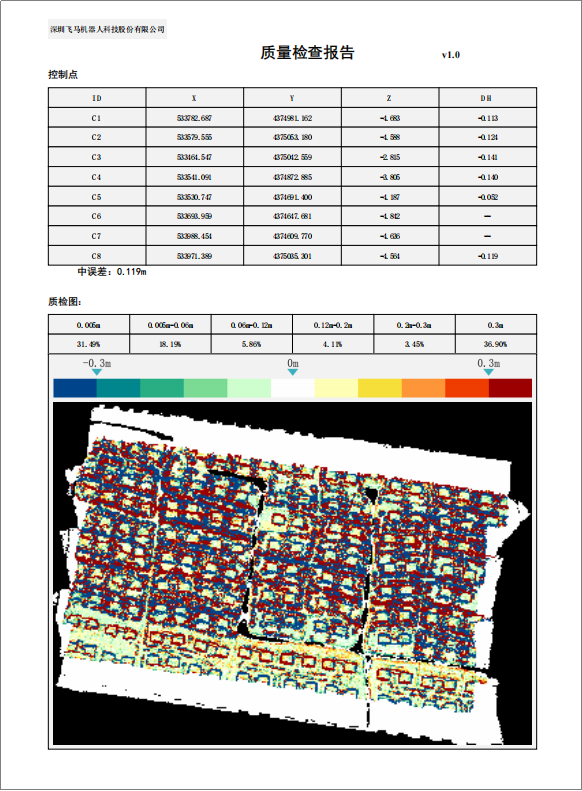
质量检查报告样式
已关注 关注 重播 分享 赞 关闭
观看更多更多
退出全屏切换到竖屏全屏退出全屏无人机网已关注分享视频,时长01:31
0/0
00:00/01:31切换到横屏模式继续播放进度条,百分之0
播放00:00/01:3101:31
全屏倍速播放中
0.5倍 0.75倍 1.0倍 1.5倍 2.0倍 超清 流畅 您的浏览器不支持 video 标签继续观看
重磅迭新 | 飞马机器人激光雷达一站式数据处理软件「智激光」新版发布,数据处理性能再升级!
观看更多转载,重磅迭新 | 飞马机器人激光雷达一站式数据处理软件「智激光」新版发布,数据处理性能再升级!无人机网已关注分享点赞在看已同步到看一看
写下你的评论视频详情02
【点云解算】功能优化
为了方便用户使用,【点云解算】界面支持同时勾选“解算”、“赋色”、“平差”、“去噪”、“冗余剔除”、“质量检查”等功能,您可以实现一键获取标准点云成果。
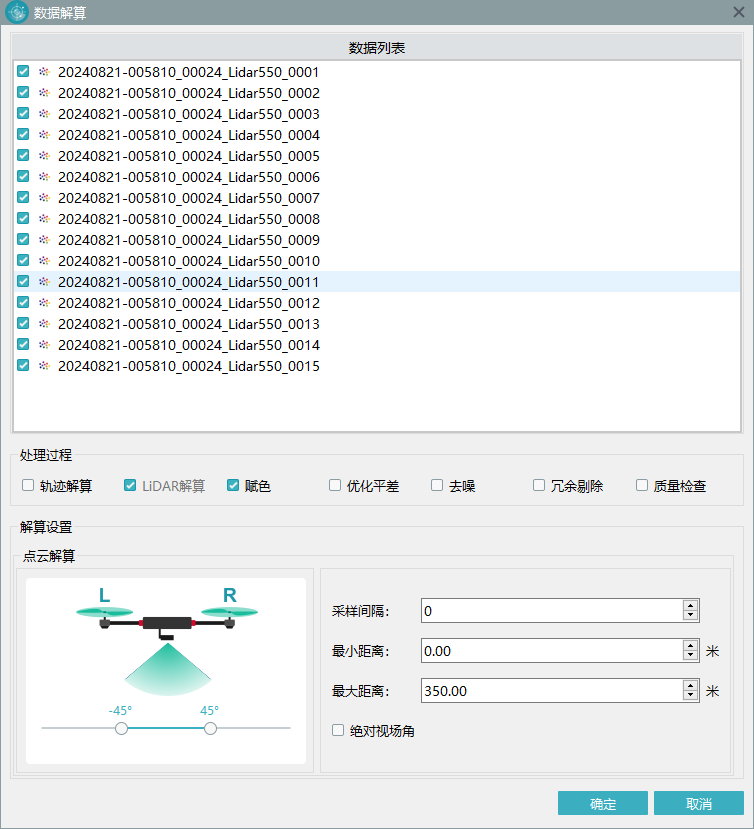
点云功能界面
03
【优化平差】功能优化
支持飞马全系列机载雷达数据的平差处理,同步支持多架次的联合平差。
功能适应性良好,无论是多边形测区,或是条带状测区,均能实现较好的数据优化,提高成果可靠性,欢迎广大用户测试反馈!
功能优化说明:
数据适应性更佳;
处理效率更高;
可解决架次间/架次内局部分层问题;
算法自适应处理,无需人为干预。
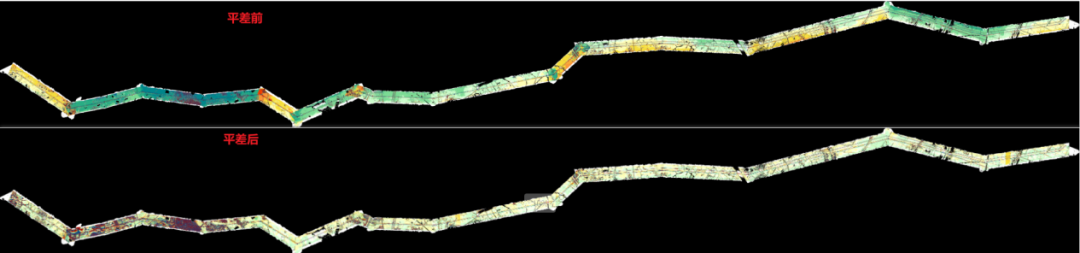
分层数据优化平差前后对比
04
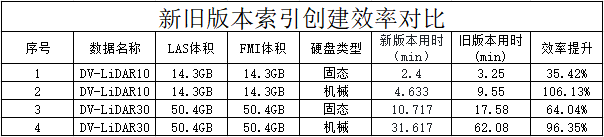
解算效率优化
为提高点云解算效率,优化解算占用空间,研发团队对点云解算全流程进行了重构,该版本将通过以下两种方式来减少过程文件的空间占用并提高处理效率:
解算效率优化说明:
优化1:取消过程文件*.lrp文件的输出;
优化2:优化fmi索引创建的效率。
05
【点云纠正】功能优化
【点云纠正】为提高激光雷达数据精度的功能。通过内业拾取标靶中心点与外业实测点位进行误差统计,借助软件优化算法,来提高激光雷达数据的平面及高程精度。
功能优化说明:
优化控制点及匹配点显示窗口,便于确认点位对应关系;
控制点纠正更新标靶中心识别算法,提取的标靶中心为整个标靶的几何中心;
增加【RGB】匹配方法,支持对赋色点云进行靶标识别;
增加【画线】匹配方法,使用人工交互的方式识别标靶的中心;
【拾取方法】中“点选”及“线选”模式只能在单航带上操作,拾取时需隐藏其他点云数据。
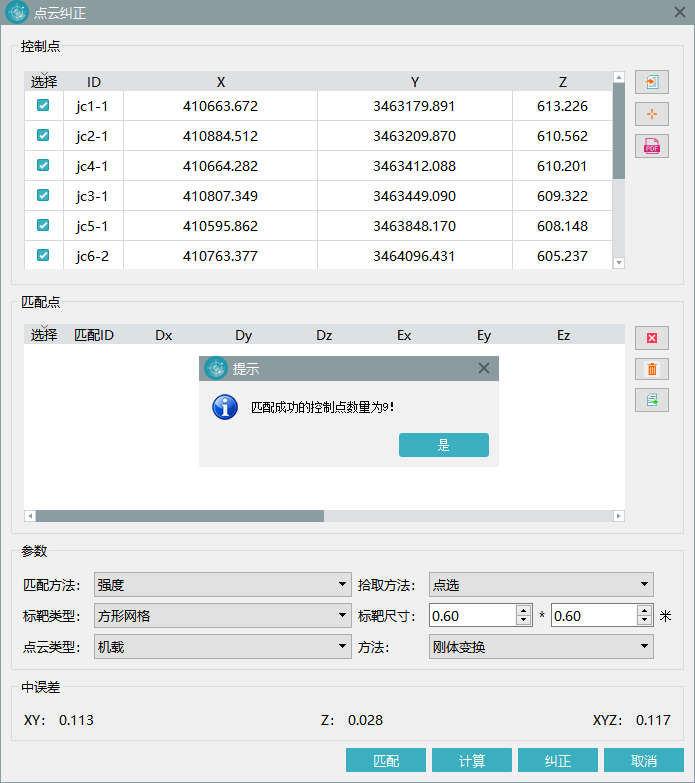
注:【匹配】准确度与单航带点云密度息息相关,建议单航带密度优于1000pts/m²时使用,其余情况可通过手动拾取实现。