研究显示人工智能驱动系统如何增强无人机功能
编译 2024-12-25 14:35 丸豆 来源:无人机网无人机网(www.youuav.com)援引外媒消息,虽然商业无人机新闻主要关注现实世界的用例,展示无人机如何帮助企业和组织实现其目标,但重要的是要记住,有许多研究人员“在幕后”工作,推动技术进步,并使无人机创新成为现实。
内布拉斯加大学林肯分校研究空中机器人的博士生克里希纳·穆瓦 (Krishna Muvva) .表示到
“我的工作涉及机器人、计算机视觉和机器学习等人工智能,”他解释道。“我一直在研究如何整合 MPC 和基于神经网络的方法,以帮助无人机在复杂环境中实现精确导航、避障和更强大的控制。”
通过他的工作,Muvva 希望将传统和基于人工智能的控制方法结合起来,并找到使用先进感知机制的方法,“让无人机能够在公共安全、关键基础设施和农业等动态环境中自主导航和操作”。
例如:
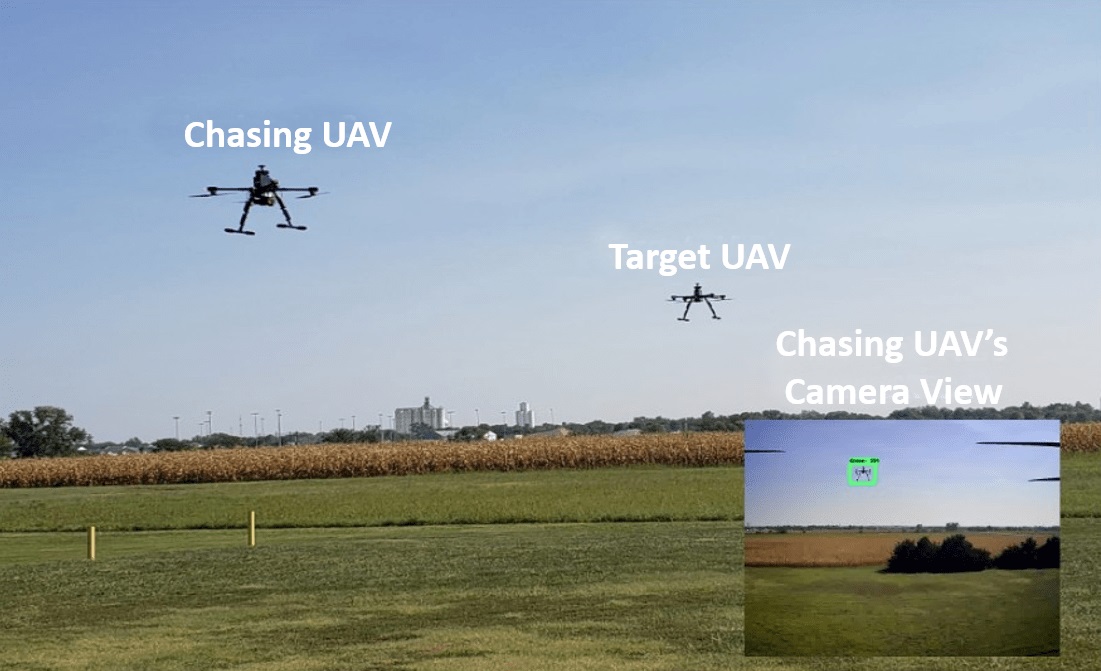
Muvva 合作撰写的论文名为“使用基于深度学习的检测实现多机器人系统中无人机的协同定位”,该论文解决了无人机如何实现精确定位的问题,尤其是在近距离飞行时。该论文描述了 Muvva 和他的同事如何提出一个新颖的框架,该框架“利用基于深度学习的检测”来提高由无人机和无人地面车辆 (UGV) 组成的多机器人系统的定位精度。通过这种方法,研究人员能够提高“即使在具有挑战性的环境中也能实现定位精度”——这一进步可以使无人机在农业、执法和测绘等领域更好地运行。
为了进一步将先进技术融入无人机操作,Muvva 和他的同事们一直在努力提高无人机等自主系统的卷积神经网络 (CNN) 感知能力。正如他们的研究“通过控制/感知协同设计为无人机提供可靠的人工智能”中所述,研究人员研究了 CNN 延迟和准确性之间的权衡所带来的挑战。他们开发了一种“情境感知模型预测控制 (MPC) 来整合感知和控制模块”。通过现实世界和模拟器测试,这种方法被证明可以帮助无人机实现最佳系统性能。
对于 Muvva 来说,这些研究可以为人工智能在无人机任务中的进一步整合铺平道路,从而实现更高效、更准确、更有效的行动。
“随着无人机应用扩展到复杂环境,实现精确导航、避障和稳健控制变得更加重要,”他表示。“在具有挑战性的环境中,混合 MPC 与神经网络在无人机适应性方面的应用展示了人工智能在无人机操作中的潜在变革潜力。”
相关资讯
更多- Infravision筹集9100万美元用于电力行业线路维护无人机项目
- 中国无人机科技为马里共和国打造国家庆典新范式
- “外星战舰”空降内蒙古·康巴什低空盛宴
- AerialMetric 和 Shearwater 助力马达加斯加医疗无人机网络建设
- AirMatrix 和 Robin Radar 联合推出 AI 驱动的反无人机解决方案
- Dolunts® 为多个行业应用提供可定制的连续无人机解决方案
- Unusual Machines 的 Aura VTX 获得 DIU Blue UAS 认证
- DroneDeploy 推出 Progress AI 实现施工跟踪自动化
- Embention 获得无人机和 eVTOL 自动驾驶系统的 AESA 授权
- High Lander Aviation 推出新型无人机空域管理系统