构建应急“第一张图” | 飞马机器人实时三维建模解决方案
转载 2025-02-13 13:40 飞马机器人 来源:飞马机器人

在应急与突发事件处置的“战场”上,一张实时更新的灾害现场实景地图对于应急救援实战具有重要意义。
我国地域辽阔,自然灾害频发,这些灾害不仅造成了严重的人员伤亡和经济损失,也对灾害应急管理和救援工作提出了更高的要求。
2024年初,应急管理部科技和信息化领导小组办公室正式印发了《2024年地方应急管理科技信息化任务书》。这一文件的出台,旨在深入贯彻落实全国应急管理工作会议精神,特别是针对自然灾害应急能力的提升,加快推动相关预警指挥、航空应急等项目的实施,从而促进应急管理的科技信息化发展。
在应急与突发事件处置的“战场”上,一张实时更新的灾害现场实景地图对于应急救援实战具有重要意义。为有效提升自然灾害应急能力,迎合相关应急技术要求,飞马机器人凭借其在工业无人机研发领域的多年积累,以及在软硬件研发和工程技术应用方面的丰富实践经验,成功集成研发了实时建模系统。

飞马机器人实时三维建模解决方案
该系统具备“边飞行、边传输、边处理、边显示”的快速实时建模功能,能够在飞机降落后几分钟内完成全部飞行数据的实时建图,为灾害应急中的快速部署提供现场最新的态势信息,辅助救援人员精准研判灾情发展情况,从而有效提升应急救援的效率和科学性。
为满足多样场景可见光数据实时建模的需求,飞马提供了两种实时建模解决方案。
01
方案一:V500R视频实时建模方案
该系统由飞马V500R无人机平台、V-TIRV510三光吊舱、地面站、MESH快传系统、实时建模软件及高性能算力机组成。V500R是由飞马机器人自主研发的一款轻量化、长航时纯电动垂直起降固定翼无人机系统,搭载V-TIRV510光学变焦三光吊舱,主打“灵活侦察”、“高效巡检”、“轻巧便携”。
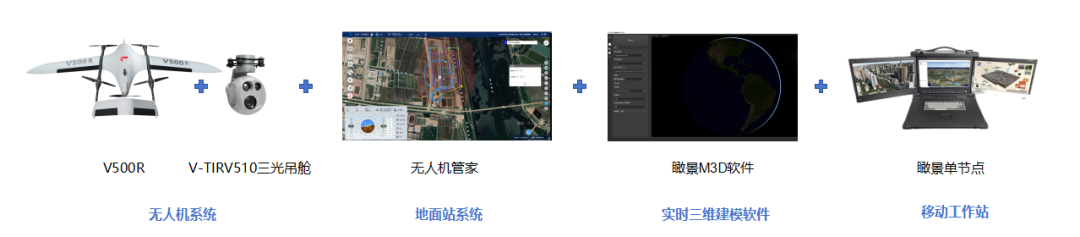
采用单节点高性能算力机可满足边飞边传边处理边显示的要求,能够在数据传输完成5分钟内实现全区视频数据的实景三维模型的生产。V500R实时建模无需联网,适用于多种场景。用户可以在无公网信号的情况下进行视频实时回传与实时建模,实现应急救援与现场侦察。
方案二:V10R视频/倾斜实时建模方案
该系统由飞马V10R无人机平台、V-TIRV10双光吊舱、D-OP5000倾斜模块、地面站、MESH快传系统、实时建模软件及高性能算力机组成。V10R整机起飞重量25kg,最大续航时间为240min,集长航时、大载重、高集成、高性能、高可靠性于一体,V10R采用多载荷模块化设计,可搭载光电吊舱模块、航测模块、倾斜模块、激光模块等载荷,具备多源数据获取能力。所有载荷一键切换,满足航测、安防、侦察巡检、应急等行业应用需求。
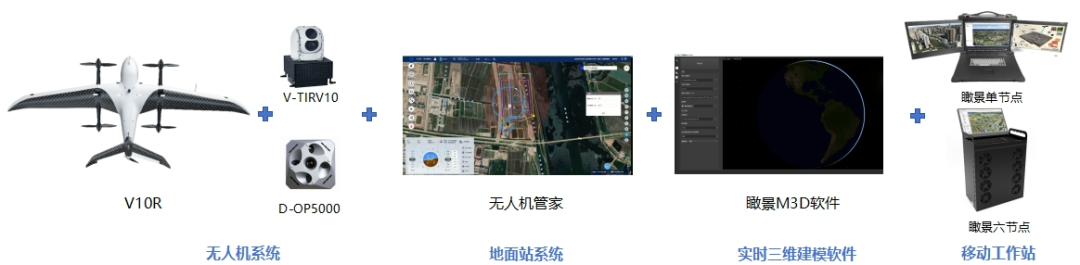
V10R无人机搭载视频光学吊舱进行数据采集。采用单节点高性能算力机可满足边飞边传边处理边显示的要求,能够在数据传输完成5分钟内实现全区视频数据的实景三维模型的生产。
V10R无人机搭载倾斜模块进行数据采集。采用6节点高性能集群服务器可满足边飞边传边处理边显示的要求,能够在数据传输完成5分钟内实现全区倾斜数据全分辨率的高精度、精细化实景三维模型的生产。
应用案例
案例一
场景:乡镇
面积:0.6km²
方案组成:V10R挂载V-TIRV10搭配单节点服务器
航高:180m
建模完成时间:飞机降落后2min



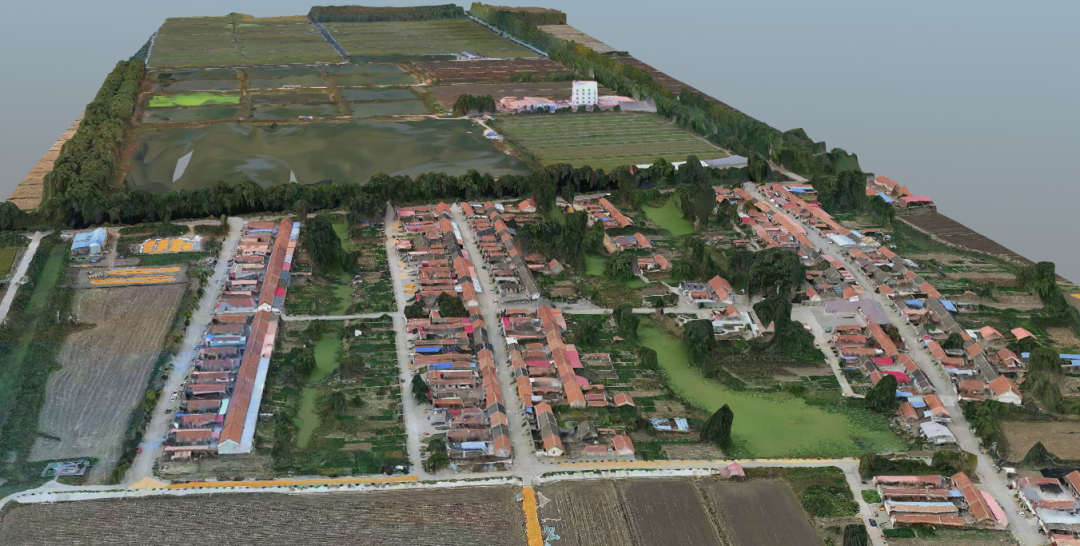
案例二
场景:村庄
面积:2km²
方案组成:V500R挂载V-TIRV510搭配单节点服务器
航高:200m
建模完成时间:飞机降落后5min




案例三
场景:村庄
面积:0.3km²
方案组成:V10R挂载V-TIRV10搭配单节点服务器
航高:180m
建模完成时间:飞机降落后1min



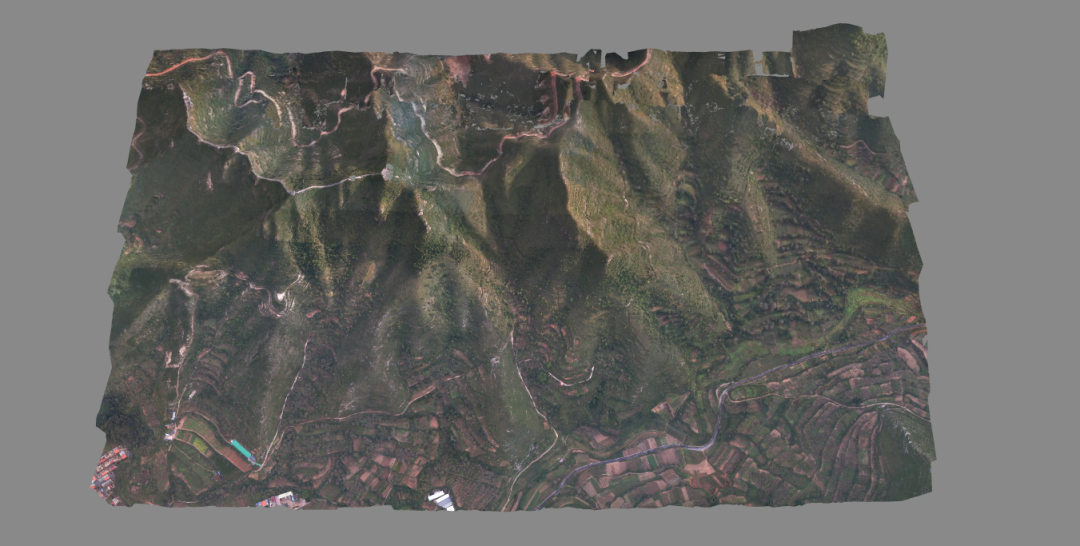
案例四
场景:山区
面积:3km²
方案组成:V10R挂载D-OP5000搭配六节点服务器
航高:250m
建模完成时间:飞机降落后5min


相关资讯
更多- 展会回顾 | 昊舜视讯亮相2026全球无人机&无人机系统产业博览会
- 喜报丨我司荣获西湖区翠苑街道人武部“2025年度民兵整组先进单位”称号,子公司同步摘得莲都区人武部表彰!
- 普宙科技中标!市场开拓再传捷报
- 武汉中航通飞特种飞行器有限公司第四届董事会第二十次会议圆满召开
- 深化产教融合,共筑低空新篇——西安思源学院领导莅临猎隼航空交流指导
- 星逻智能亮相2026江苏光伏创新发展大会,荣获“卓越智能运维企业”奖
- 普宙科技亮相第十六届交博会,助力构建智慧交管新生态
- 科技赋能急救・低空筑梦未来|东莞市 “科技 + 急救” 科普讲座走进东莞市电子商贸学校
- 纵横股份签约“空中高德”低空生态,参编《空中高德低空产业白皮书》
- 党建共建强根基,校企融合谋发展——异能无人机党支部与常平成校党支部开展主题党日活动