智激光优化平差:激光点云处理的“魔术师”
转载 2025-02-17 11:17 飞马机器人 来源:飞马机器人
在无人机激光雷达测绘的世界里,点云数据如同一幅幅细腻的画卷,记录着大地的轮廓与细节。然而,这幅画卷在拼接过程中常常出现异常“褶皱”—— 航带点云分层问题,给测绘生产工作带来挑战。[智激光],作为飞马[无人机管家专业版]激光点云数据处理的专业软件模块,从最初的点云[航带平差]到现今持续迭代的点云[优化平差],都在追求科学抚平(消除)这些“褶皱”,让点云数据更加逼近真实。
Q:何为优化平差?
优化平差相较整体航带平差,在算法上更专注解决航带点云拼接中的分层问题。这些问题主要分为三类,即航带间大分层、局部扭曲分层以及内部微小分层。优化平差算法巧妙地融合了整体航带平差和分段平差的优点,且内置参数可以自适应匹配,无需[特征提取]和[分段设置]等操作,实现了点云平差的一键处理。此外,庞大的点云数据量也带来了解算效率的挑战,成为航带平差的一大痛点,而优化平差在保证点云数据精度的同时,还兼顾了平差效率,进一步提升了用户友好性。
Q:优化平差针对常规场景的平差效果如何?
在无人机激光雷达作业常见的带状航线、耕地航线等常规场景中,优化平差针对数据样本均取得了不错的效果。特别地,针对更易受到IMU惯性发散影响的长航带点云分层数据,经优化平差后不仅航带间的分层情况基本消除,而且架次间的分层也能得到了明显改善。
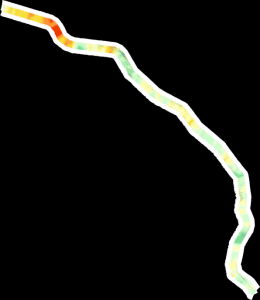
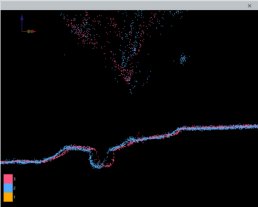
长航带之电力线点云
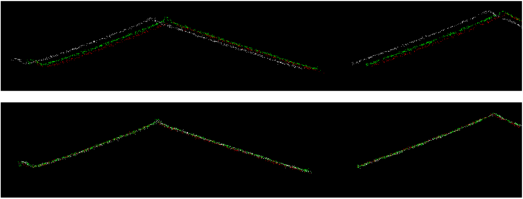
测试样本为长航带电力巡线数据。下图左侧为原始点云质量检查图、右侧为优化平差后质量检查图。对比可见,经优化平差后,单架次内航带之间的分层基本消除。
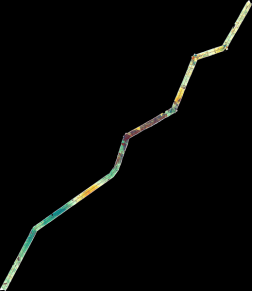
原始点云质量检查图

优化平差后点云质量检查图
长航带之多架次点云
测试样本为多架次带状航线点云数据。原始点云在架次间重叠处分层明显(如下左图),优化平差后该分层情况改善明显(如下右图),同时航带间分层也改善明显。

原始点云质量检查图

优化平差后点云质量检查图
一般带状航线点云数据
测试样本为一般场景的带状航线点云数据。下图左侧为原始点云质量检查图,可以看到其左上角处点云分层严重,且分层分布不均匀,经优化平差后,其质量检查图(如下图右侧)显示分层问题基本解决。
原始点云质量检查图
优化平差后点云质量检查图
Q:多线激光雷达点云数据优化平差效果如何?
在多线激光雷达点云数据处理方面,优化平差不仅可以解决航带间的水平分层和垂直分层,还能通过自研算法减小激光器多线之间的角度误差,从而优化点云厚度。以LiDAR500为例,优化平差可将其点云厚度从15cm以上优化至8cm左右:优化平差前,屋顶厚度为20cm、地面厚度为17cm;优化平差后,屋顶厚度降至8cm、地面厚度也降至8cm,效果显著。
航带间水平分层优化平差前后对比:
优化平差前(上图)、优化平差后(下图)质量检查图对比
航带间垂直分层优化平差前后对比:

优化平差前(上图)、优化平差后(下图)质量检查图对比
航带间屋顶及地面优化平差前后对比:
优化平差前,屋顶厚度约为20cm

优化平差前,屋顶厚度约为8cm

优化平差前,地面厚度约17cm

优化平差后,地面厚度约8cm
Q:谈谈优化平差算法边界与局限性?
尽管智激光优化平差功能有显著特色,但也依然存在已知不足:
目前无法解决单航带内部分层,如激光点云数据的单航带内部分层。
对于严重畸变(局部点云扭曲、错位分层严重)的点云,优化平差只能改善,无法达到完美效果。
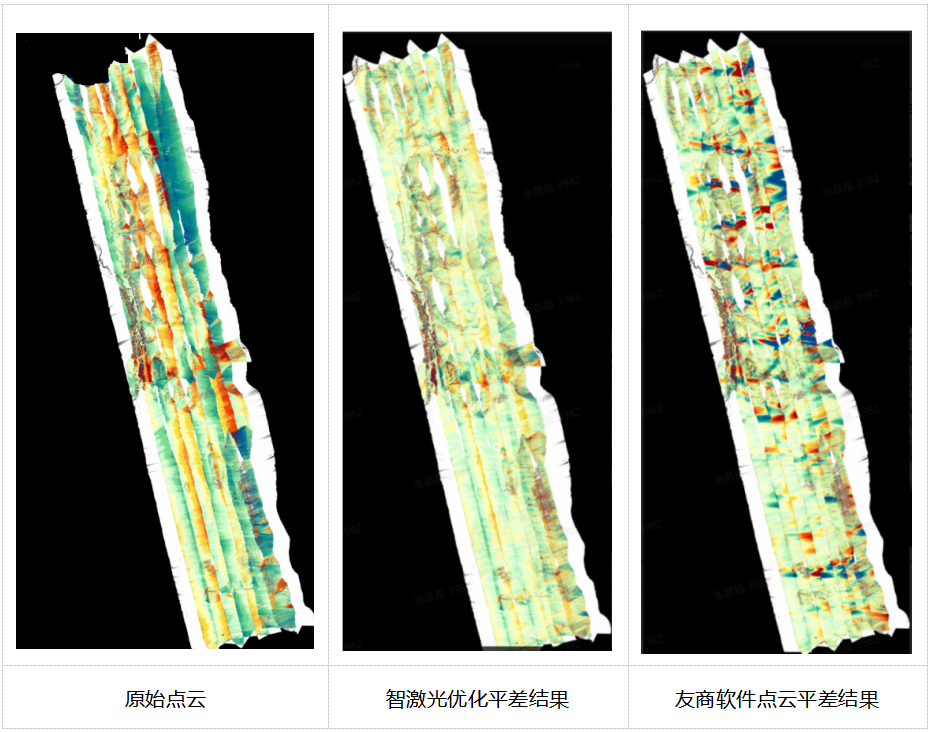
Q:智激光优化平差与友商软件平差算法的效果对比如何?
在与友商软件的非穷尽样本对比中,智激光优化平差功能在以下多个场景中展现出优势:
在长航带数据(电力线场景)中,智激光的优化平差效果明显优于友商软件,局部不存在明显分层现象。
在一般丛林场景和耕地低植被场景中,智激光的优化平差效果也明显优于友商软件。
在航带点云出现倾斜现象的场景下,智激光的优化平差效果明显优于友商软件。
在常规场景下,双方效果基本相当。例如,在一般耕地场景中,智激光优化平差与友商点云平差的效果基本相当。
在劣势场景中,如长航带变高飞行、原始分层极端严重、地形平坦无特征等,智激光优化平差与友商软件的处理效果都存在能力局限。
优势场景(数据)
优势场景不是固定的,与点云数据的形态有关,主要取决于地形起伏形态、建筑物(构筑物)密度、地表植被疏密等因素。为了便于数据区分,以场景做分类统计。
长航带电力线场景
测试样本来自某区域长航带激光点云数据。

某区域原始解算点云质量检查图(局部)
从平差结果上看,友商软件的平差结果(如右图)整体上不如智激光的优化平差(如左图),表现是局部存在明显分层。同时和原始点云相比,友商软件的平差结果也存在局部分层。

智激光优化平差结果

友商软件点云平差结果
智激光优化平差、友商软件点云平差后结果分别和原始数据比较,以航带尾部为例,智激光优化平差效果明显好于友商软件点云平差结果。
智激光优化平差结果
友商软件点云平差结果
一般丛林场景
下图左侧为原始点云数据,中间为智激光优化平差结果,右侧为友商软件点云平差结果。智激光优化平差效果明显优于友商软件,且友商软件结果在局部较大范围内存在明显分层。
原始点云

智激光优化平差结果

友商软件点云平差结果
航带点云倾斜场景
测试样本的航带间点云分层呈现出倾斜特点(如左图),使用智激光优化平差后分层有明显改善(如中间),效果明显优于友商软件(如右图)。

原始点云

智激光优化平差结果

友商软件点云平差结果
一般耕地低植被场景
如下图,测试样本为两个架次点云数据,左侧为原始点云质量检查图,中间为智激光优化平差结果,右侧为友商软件平差结果。友商软件局部分层明显,且呈台阶状。
效果相近场景(数据)
效果相近场景多为常规场景,如城镇居民区场景、农田场景、交通线路场景、特征丰富的矿场及山区场景等。在这些场景中,智激光优化平差与友商软件的平差效果基本相当,都可以提供更高质量的点云数据。
特征丰富的山区场景
下图左侧为原始点云数据,中间为优化平差结果,右侧为友商软件平差结果。测试结果基本相当,平差效果良好。

原始点云
智激光优化平差结果

友商软件点云平差结果
劣势场景(数据)
劣势场景通常是由于飞行条件及测区原因导致的严重分层,如长航带变高飞行因俯仰角变化剧烈导致的局部分层、飞行过程中因GNSS信号质量差导致的严重分层以及地物特征不明显导致出现的分层等。
飞行姿态角变化剧烈
下图为长航带变高飞行的点云数据,因姿态角变化过大导致出现了局部分层,友商软件点云平差与智激光优化平差无明显优劣,各有适应性体现但均无法有效改善。

原始点云

智激光优化平差结果

友商软件点云平差结果
细节剖面对比:
智激光优化平差结果
友商软件点云平差结果
原始点云分层极端严重
原始点云分层剖面,点云在水平和垂直方向的分层过大。经智激光优化平差后的结果与原始点云数据对比,垂直方向分层有改善,但水平方向分层没有解决。

原始点云分层剖面图
智激光优化平差结果
下图左侧为原始点云质量检查图,中间为优化平差点云质量检查图,右侧为友商软件平差后质量检查图。智激光优化平差后只能解决一部分分层,友商软件的处理结果与智激光优化平差基本一致。

地形平坦、地物特征不明显的场景
下图左侧是原始点云质量检查图,中间为优化平差后点云质量检查图,右侧为友商软件平差后质量检查图。优化平差后点云分层情况虽然有改善,但是还是存在较为严重的水平分层。

原始点云

智激光优化平差结果

友商软件点云平差结果
Q:优化平差前后绝对精度的变化如何?
从平差前后高程精度比较来看,智激光优化平差后的点云绝对精度没有变化,而友商软件平差后的精度比原始数据略有损失。测试数据使用同组带有像控点数据,结果显示智激光在绝对精度保持方面更具优势。

注:友商软件平差后的数据使用智激光验证精度,其精度指标为均方根误差。
智激光优化平差功能在一定程度上有效地解决了机载激光雷达点云分层这一行业难题,为测绘工作者们提供了更加高效、可靠的数据处理工具,无人机管家专业版的无人机用户群可免费使用。
相关资讯
更多- 展会回顾 | 昊舜视讯亮相2026全球无人机&无人机系统产业博览会
- 喜报丨我司荣获西湖区翠苑街道人武部“2025年度民兵整组先进单位”称号,子公司同步摘得莲都区人武部表彰!
- 普宙科技中标!市场开拓再传捷报
- 武汉中航通飞特种飞行器有限公司第四届董事会第二十次会议圆满召开
- 深化产教融合,共筑低空新篇——西安思源学院领导莅临猎隼航空交流指导
- 星逻智能亮相2026江苏光伏创新发展大会,荣获“卓越智能运维企业”奖
- 普宙科技亮相第十六届交博会,助力构建智慧交管新生态
- 科技赋能急救・低空筑梦未来|东莞市 “科技 + 急救” 科普讲座走进东莞市电子商贸学校
- 纵横股份签约“空中高德”低空生态,参编《空中高德低空产业白皮书》
- 党建共建强根基,校企融合谋发展——异能无人机党支部与常平成校党支部开展主题党日活动