鲲鹏无人机MFE C7(MakeFlyingEasier Cseries 7th)系列飞行控制系统

产品详情
产品参数
产品图片
|
鲲鹏无人机MFE C7(MakeFlyingEasier Cseries 7th)系列飞行控制系统 产品分类: 多旋翼版本(产品序列号MA开头 示例:MA71000000) 固定翼版本(产品序列号FA开头,向下兼容旋翼机 示例:FA71000000) 垂直起降固定翼版本(产品序列号AA开头,向下兼容固定翼以及旋翼机 示例:AA71000000) 油动飞机版本(产品序列号第三位为8 示例:FA81000000) 支持专业版地面站版本(产品序列号第四位为2 示例:AA72000000) 多旋翼版本支持机型: 300-2500mm轴距X4、+4、X6、+6、X8、+8、X4同轴共桨型多旋翼无人机 固定翼版本支持机型: 多旋翼版本机型+(常规布局V型尾翼固定翼无人机,常规布局垂直尾翼固定翼无人机,飞翼无人机)(固定翼机型均支持油动) 垂直起降版本支持机型: 多旋翼版本机型+固定翼版本机型+(4垂直电机+1/2水平电机布局垂直起降无人机,4电机+2倾转舵机倾转电机式垂直起降无人机)(垂直起降固定翼机型均支持油动) 公版包装内含: 飞行控制器主控 x1 GPS模块 x1(可选择性加装1个作为冗余) 5/10km全双工数传天空端 x1 5/10km全双工数传地面端 x1 电源管理模块 x1 空速计模块 x1(固定翼及垂直起降固定翼版本) CAN总线集线器(HUB) x2 CAN总线双公头10cm端子线 x2 质保书 x1 地面站软件 x1(内置于飞控内部TF卡) 安装使用说明书 x1(内置于飞控内部TF卡)
适用场景:物资运输投放(空投/降落投)、管道/道路监控、航空测绘、航空摄影、救灾/反恐搜索、搭载科学仪器、二次开发...... 公版报价:多旋翼版本(搭配基础版地面站¥5499,搭配专业版地面站¥8999) 电动固定翼版本(搭配基础版地面站¥7999,搭配专业版地面站¥12999) 电动垂直起降版本(搭配基础版地面站¥10999,搭配专业版地面站¥16999) 以下情况请单独联系客服人员获取报价:1、需单独购买电源管理模块以支持双电池组监测功能;2、油动固定翼/油动垂直起降/支持RTK等版本; 以上报价均含13%增值税专票与2次远程技术支持服务,如需工程师上门调试服务,请联系我公司客服获取报价 OEM/ODM/委托二次开发报价:其他定制版本详询我公司客服人员或将您的需求发送邮件至service@kpuav.com 飞行控制器—产品参数 传感器及算法: GPS:UBlox-M8N PVT模式 水平定位精度±1.5m 三轴陀螺仪:±1000deg/s (油动飞机自动调整至±2000deg/s)(高性能恒温算法可将陀螺仪性能提升至中端ADI产品水平) 三轴加速度计:±8g(油动飞机自动调整至±16g)(高性能恒温算法可将加速度计性能提升至中端ADI产品水平) 三轴磁罗盘:±8Gs 姿态解算频率:1000Hz 多旋翼姿态控制算法:鲲鹏无人机KPV1高鲁棒性控制算法(基于自适应扩展PID)、普通双环串级PID(可选但不推荐) 固定翼姿态控制算法:鲲鹏无人机KPV1高鲁棒性控制算法(基于自适应扩展PID) 固定翼导航算法:L1自适应导航+舵面前馈补偿器
信号接口: CAN2.0 x2(挂载飞控系统其它传感器,可通过HUB扩展) TTL USART x3(挂载数传以及提供人机交互接口) 电机/舵机控制PWM x10(挂载舵机、电子调速器等驱动设备) 作业信号输出端口 x2(挂载相机、舵机等作业设备) TF卡接口x1 (存储飞行数据、作业数据,系统固件升级) (备注:遥控器数据捕获端口位于数传天空端,可支持PWM、PPM、S-BUS、发动机转速脉冲信号输入) 主控器电源输入(使用飞控系统自带电源管理模块供电): DC 5.5-7.0V 500mA 平均功耗0.9W 最大功耗2.75W(宽电压版本:5.5-17V) 飞行功能: 定高模式、增稳模式(固定翼)、定高控速模式(固定翼)、GPS定点模式 点到点导航(调高后到达/飞行过程中调高/到达后调高)、兴趣点环绕、螺旋环绕搜索、滞留点、降落投掷、空中投掷、机场禁飞区限制、地面站按键模拟摇杆手动控制 API控制接口可支持外部机载设备控制飞机导航 详细请参见"资料下载"页面相关技术文档 单次飞行作业最大航点支持数量:250个 安全特性: 支持双GPS+双磁罗盘冗余; 高性能惯性传感器恒温算法确保六轴传感器稳定工作并使其精度媲美中端ADI传感器; 完善的起飞保护与检查功能,可以使飞机避免带病飞行; 内置全面完善的整机飞行状态观测器,可实时监测无人机飞行稳定性并提示用户; 内置大量紧急状态保护代码,可在紧急情况下有效避免危险事故发生以及止损; 飞控系统可自动评估飞机操控特性以及模拟重心位置以方便用户对机体硬件进行调整; 支持紧急原地降落以及紧急情况指点控制飞行功能; 多旋翼机型安全保护功能演示视频:http://v.youku.com/v_show/id_XMzk5NDU4OTY4OA==.html?spm=a2h3j.8428770.3416059.1
多旋翼机型紧急保护: 智能电池过热/过冷保护:限制飞行性能 超低空姿态严重异常(认定侧翻):迅速关停电机并上锁 空中姿态严重异常(认定侧翻,如坠机在树上或悬崖):关停电机并上锁 重心或航向稳定性严重异常:限制飞行性能,如在导航模式则返航 空中飞行时发生翻滚以及姿态严重过冲事件:限制飞行性能,如在导航模式则返航 无人机严重超载或动力系统异常:限制部分飞行性能,如在导航模式则返航 导航起飞检查阶段无人机严重超载:返航 导航起飞检查阶段机体震动过大:返航 导航起飞检查阶段重心或航向稳定性严重异常:返航 固定翼机型紧急保护: 非纯手动模式检测到失速:平滑限制横滚角度与俯仰角度 非纯手动模式超低空飞行时检测到姿态严重异常并且认定侧翻:关停电机并上锁 垂直起降固定翼机型紧急保护: 检测到失速:限制横滚角度与俯仰角度 超低空飞行时检测到姿态严重异常并且认定侧翻:关停电机并上锁 多旋翼模式下检测到严重超载:限制部分飞行性能,如在导航模式则返航 固定翼飞行模式切换失败:强行锁定多旋翼模式飞行,如在导航模式则返航 固定翼模式下失去对飞机的操控能力(下降速度超过阈值或操控性能严重异常):强行锁定多旋翼模式飞行,如在导航模式则返航 进入紧急保护模式下需要解除紧急保护飞行性能限制:X1拨杆在返航模式与其他模式之间快速切换2次
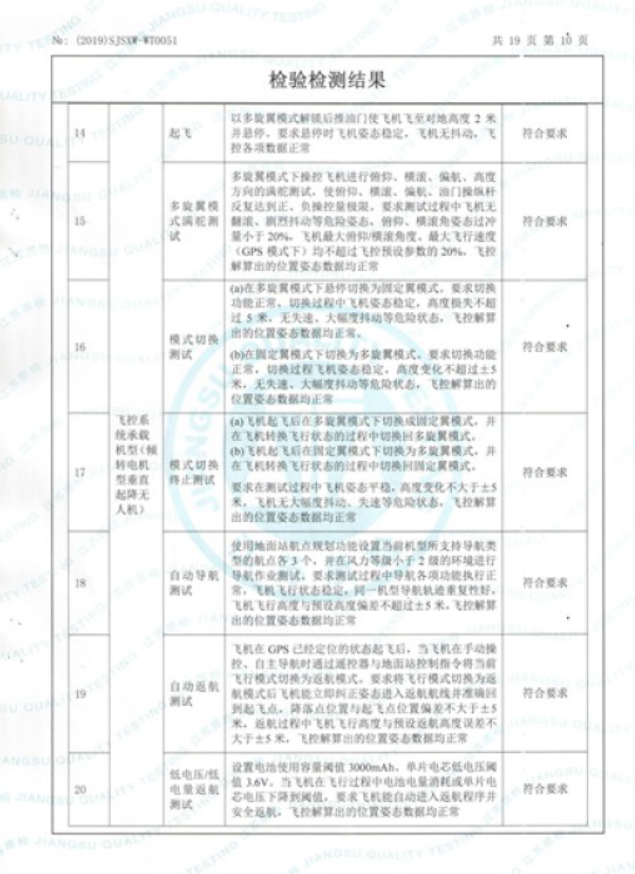
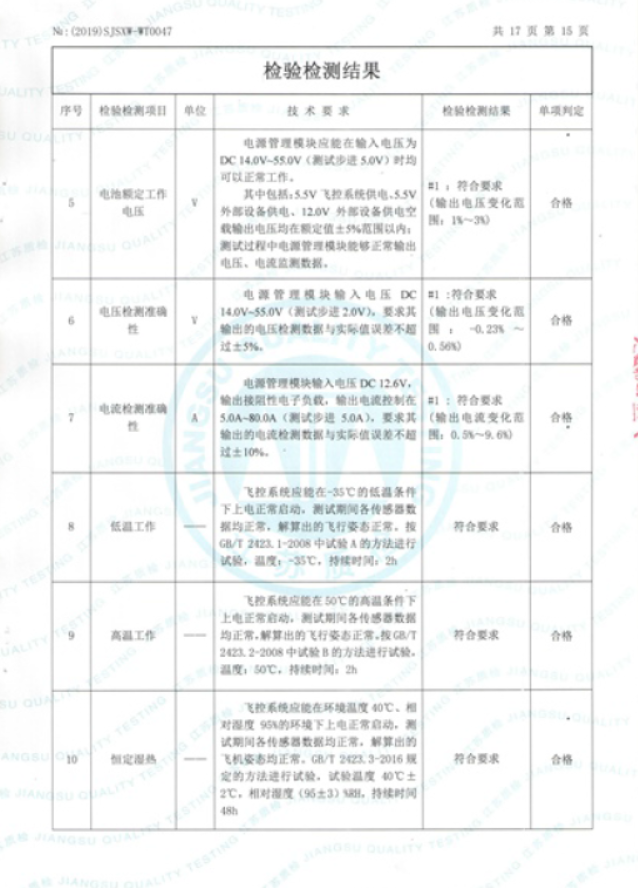
其他特性:飞行数据以及作业输出数据存储于飞控内部TF卡,可在飞行结束后提取至计算机上查看;高度开放且可定制的API接口 飞行控制器-多旋翼模式所支持飞行参数 最大上升速度:1.0-8.0m/s 最大下降速度:1.0-4.0m/s 最大飞行速度:2.0-20m/s 最大航向旋转速度:15-180°/s 摇杆控制最大倾角:20-40° 最大飞行高度(对地):5-2000m 飞行控制器-固定翼模式所支持飞行参数 最大上升速度:3-15m/s 最大下降速度:2-20m/s 最小飞行速度/失速速度:8-130m/s 最大飞行速度:15-150m/s 飞行速度变化率:2-20m/s² 滞留点半径:40-500m 最大飞行高度(对地):5-2000m 备注:1,以上参数仅为理论值,实际根据飞机硬件配置不同,您需要调整相关参数的数值 2,最大飞行高度限制可向我公司客服申请授权码解除部分限制。 对于有航空管制的区域,您需要提供飞行控制器序列号,有关部门的批复文件扫描件,其中应标有许可的最大飞行高度、飞行区域、空域使用时间。 对于无航空管制的区域,您需要提供飞行控制器序列号,您申请解除限制的区域中心的WGS-84坐标以及半径,空域使用时间。 电源管理模块-产品参数 详情点击该按钮 数据接口:CAN总线 同时最大支持接入数量:2个 电源输入:低压版3-8S 14.0-35.0V;高压版3-12S 14.0-55.0V(电压大于10S必须使用防打火插头) 电源输出:DC 5.5V 3A飞控系统供电 DC 5.5V 3A 舵机等其他设备供电 DC 12.0V 3A 舵机等其他设备供电 长时间允许电流:≤80.0A 瞬时允许电流(<5s):100.0A 检测电流范围:±126.0A GPS&磁罗盘模块-产品参数 详情点击该按钮 数据接口:CAN总线 同时最大支持接入数量:2个 电源输入:DC 5.5-7.0V 50mA (宽电压版本:2.0-17.0V) GPS芯片:Ublox-M8N 备注:GPS模块有发光版本,可当飞控系统状态指示灯使用 全双工数传-产品参数 详情点击该按钮 工作频段:433MHz+915MHz 射频功率:100mW / 1000mW 标称通信距离(空旷场地,无电磁干扰):>5Km / 10Km 实测通信距离(飞行条件见详细介绍页面):>12Km / 30Km 串口波特率:固定57600bps 空中速率:飞机->地面16Kbytes/s 地面->飞机4Kbytes/s 内部数据缓冲区大小:8Kbytes x2 数据接口(天空端):USART x1,PWM输入捕获x6,S-BUS/D-BUS信号输入端口,PPM/发动机转速脉冲信号输入端口 x1 数据接口(地面端):USB2.0(USBType-C) 警告!1000mW射频功率版本可能对人体健康有害! 空速计模块-产品参数 数据接口:CAN总线 同时最大支持接入数量:1个 电源输入:DC 5.5-7.0V 测量范围:±150m/s 配套地面站软件(KPUAV Ground Station) 详情点击该按钮 地面站软件所需最低系统配置: CPU:主频/睿频≥2.0GHz 线程数≥2线程 内存:2GB 硬盘:4GB剩余空间(必须为固态硬盘) 显卡:显存≥512MB,显卡核心性能水平达到如下显卡芯片天梯图1X性能倍率以上 https://www.xiazaiba.com/uploads/editor/2018/0925/water_2018092518344874524.jpg 地面站软件推荐系统配置: CPU:Intel酷睿架构/AMD Zen架构 单核主频/睿频≥3.0GHz 线程数≥4线程(影响航点生成/修改计算速度,最多使用6线程) 内存:8GB 硬盘:20GB剩余空间(必须为固态硬盘) 显卡:显存≥1GB,显卡核心性能水平达到如下显卡芯片天梯图10X性能倍率以上的显卡均可(影响水平移动地图时的流畅度) https://www.xiazaiba.com/uploads/editor/2018/0925/water_2018092518344874524.jpg 产品功能检验报告(如有投保或招投标需要我公司可提供该文件扫描件)
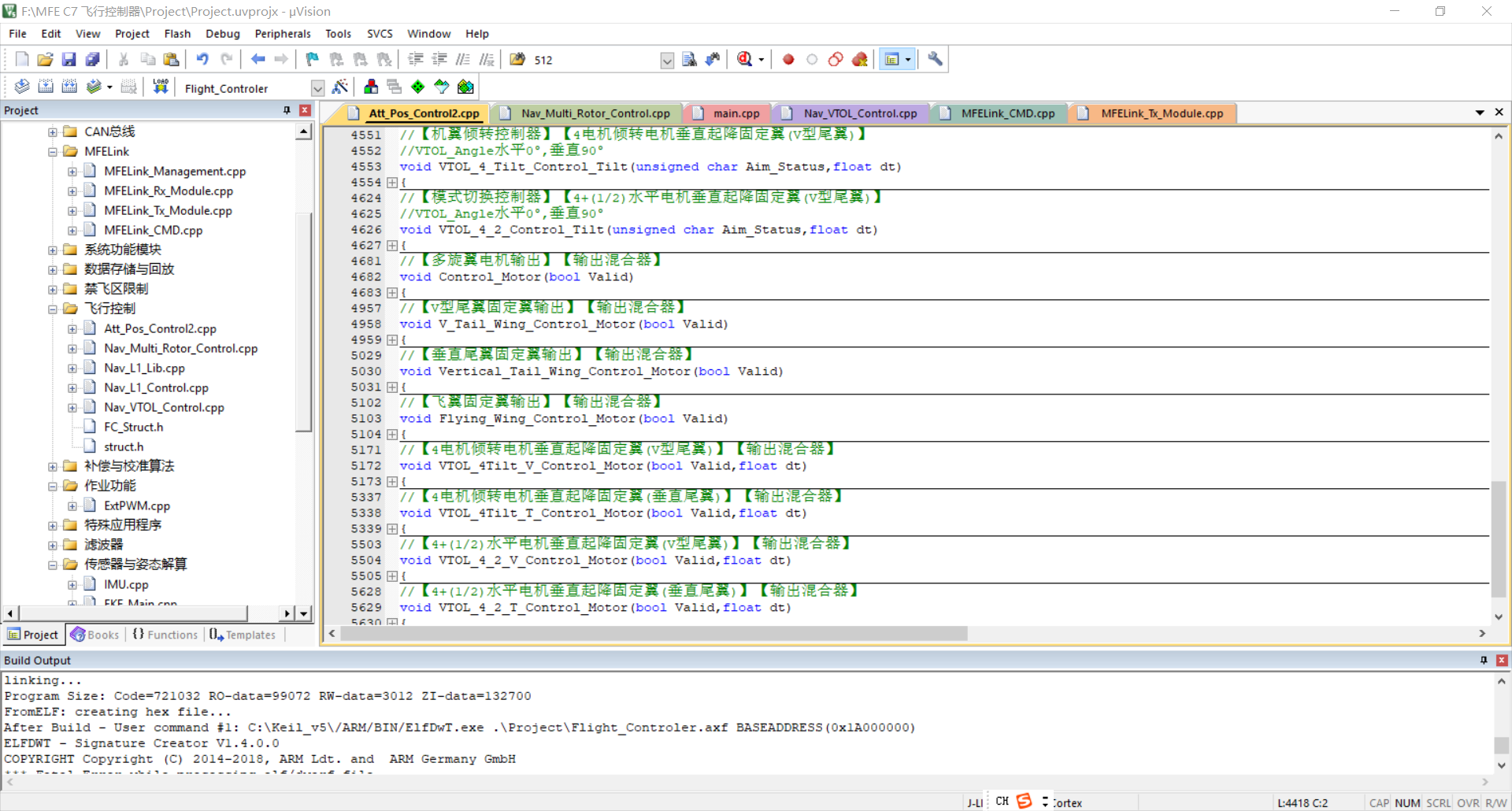
关于此产品的相关演示视频请参见我公司官网首页“产品展示及演示案例” 飞控部分源码展示 (我公司飞行控制系统历时6年自主研发,绝非PX4、APM、PPZ、QGroundStation、MissionPlanner之改版)
|