XJaguar豹力设计攻城狮:豹力是这样设计出来的
转载 2016-10-08 14:01 来源:FLYPRO
手上的项目终于完满成功,回想与兄弟们共同努力攻破重重难关的产品终于面世,迫不及待得想拿出来分享过程。我是一个航模爱好者,热爱航模已经多年,从开始的固定翼到之后的直升机,再到航拍机,最后到现在竞速机都有涉及,也认识了很多共同爱好的兄弟,虽然跟大神比,技术相差甚远,但我还是在努力地追逐大神的脚步。眼看着航模的发展至今,有着天大的变化,种种变化脱离不了创新,我对有创新的产品充满着热爱。对大疆的精灵3、Mavrc,零度的DOBBY这些拥有创新的产品我真心感到佩服。
如今,在竞速机上,我认为比较有创新的产品,想拿出来跟大家分享制作的过程以及技术的难关,欢迎大家来一起探讨,说得不对的地方,请大神请轻拍。只代表我个人的见解,不代表公司,只希望跟大家一起探讨,一起进步。
自迪拜竞速机大赛后各种类型的竞速机如春笋般爆发:但充斥市场的都是品质性能一再妥协,或者定位不清的产品,还有更多来自各个厂家的DIY配件,各自为战,玩家自已买物料组装;这些现象造就了一些较突出的问题:
1,机架未做到合理选型及设计,结构笨重,造成风阻过大,降低了飞行效能;
2,主板布局不合理,不好布线,焊线多隐患大;
3,结构复杂,装机困难;
4,动力系统选型不合理,要么电机把电调烧了,要么电池hold不住,胀气;
5,类似“万国造”,各种关键配件东拼西凑并未经过严格测试,可靠性不高;
以上最关键的问题是目前影响竞速机发展的最直接原因!有没有一款竞速机既可以性能卓越,又可以少布线,容易安装的竞速机?
带着这个问题,我们成立专门的竞速机研发组进行攻坚,经过半年多的努力,我们从电路板开始着手创新,把包括4个电调,飞控,图传,分电板,OSD 一共八块板做成一体,省去多余的布线和焊线,从根本上解决竞速机布线难,结构笨重的问题。
最后高度集成的XJaguar豹力竞速穿越机终于与大家见面了,作为豹力的设计者之一的我,把它的详细参数介绍给大家认识!
机架类型:正X型
机身尺寸(不含电池):166*166*88mm
对角轴距(不含桨):190mm
飞控:SP Racing F3
图传:5.8g 600mw 40CH
电机:2205KV2300正反螺纹
电调 : BLHELI 四合一
电池:ROC 100C 4S 1300mah
螺旋桨:5045三叶桨
最大起飞重量: 4Kg
悬停时间:9min
重量 :510g
摄像头参数
产品型号 :RunCam Swift(雨燕)
传感器 : 1/3 SONY SUPER HADII CCD
分辨率 : 600TVL
镜头 : 2.8mm
摄像头尺寸 : 26mm*26mm*30mm
PO一张精美照

上图为实物照片,只是桨叶和背景做了PS其他全是原汁原味;也许你会说这和一般的竞速机没什么太大的区别,只是外观炫酷了一些罢了;其实XJaguar豹力竞速机每一项创新都是从玩家需求出发,因为我们自己也是竞速机爱好者,在此我一条条的给您展示我们XJaguar豹力竞速竞速机是如何做到的!
一、主板布局不合理,连接线满天飞
目前市面上的竞速机大多是一堆密密麻麻的线,看了都头大,如图:

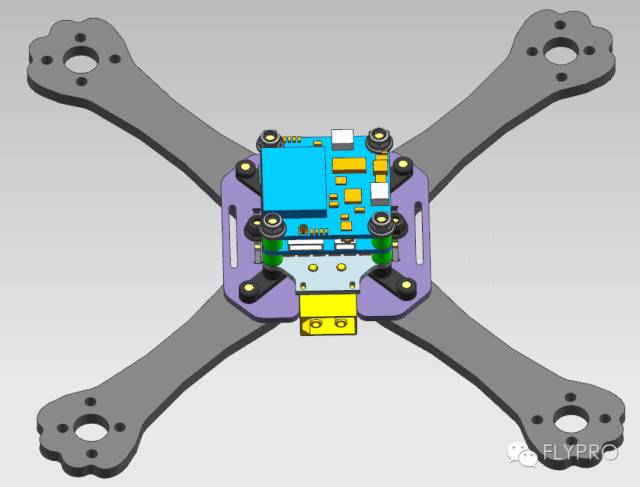
如果是自已装机估计将机臂和这些‘蜘蛛网’线焊好2个多小时已差不多过了;签于此我们的XJaguar豹力竞速穿越机已将此问题彻底解决;十分钟就可以装好了机臂和主板,组装好的机架和主板如图:

除了四个电机线外,组装到这步并没有其他线;非常简洁!
>>>这一切的功劳全归结于我们的集成塔式主板:
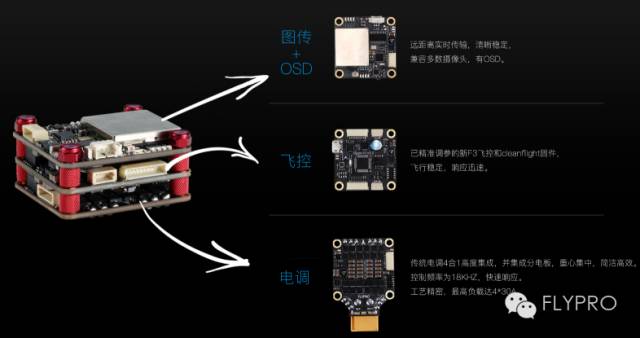
1.电调及供电板高度集成在一块板上省去了焊线的麻烦;
2.直接板对板端子连接省去很多连接线,信号线;
3.由于图传飞控电调是分开的三块板,对于大油门时三块板的散热有很大帮助,提高了CPU的运算稳定性使XJaguar豹力的性能更好的发挥出来;
4.集成电调,淘汰了传统的电调绑在机臂的方式,使得重心更加集中,反应更加灵敏;
5.组装非常简单容易;
6.关键器件保护良好,维修方便;
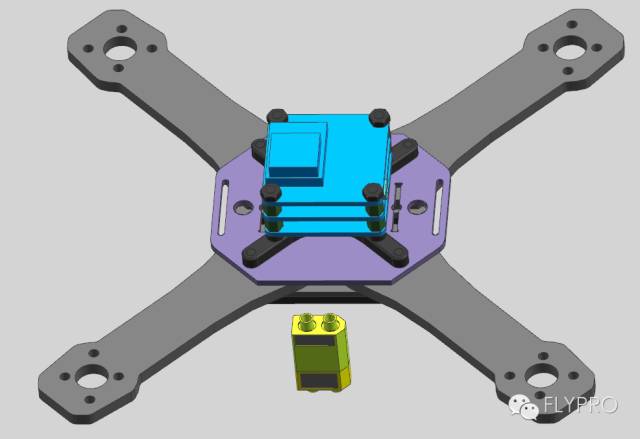
7.将电池电源接头整合到电调板上省去了焊线的麻烦;这个改进相当给力;记得最初的设计是这样的:
改进后的电源插座↓↓
二、机架选型
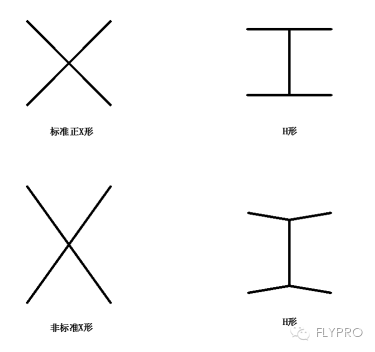
一款穿越机的灵敏性很大程度上取决于机架的选择上;目前较流行的机架有X形和H形两种,X形又细分为标准的正X形和非标准的X形;其中以X型中的正X形机架为最佳机架选择;正X形即四个电机到机架中心点的距离相等,这样的好处是重心集中飞行时无论向任何方向转向其灵活性均强于非标准的X形和H形机型;在相同的动力基础上,机身重心越集中,增加过弯的灵敏度;由此可见,机架选型对于穿越机性能提升的重要性。
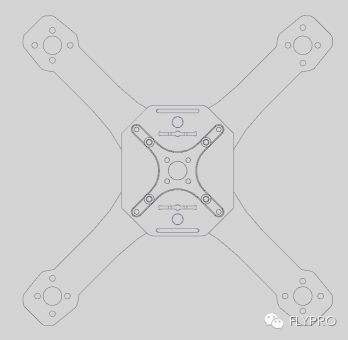
XJaguar豹力竞速机采用的正是正X形机架,虽选了正X形机架,但机臂的外形设计也是很有讲究的,不仅要考虑风阻以及强度的冗余设计,还要为整机减重考虑;只有当事人才能体会其中的艰辛;最开始的单个机架形状是直的如图:
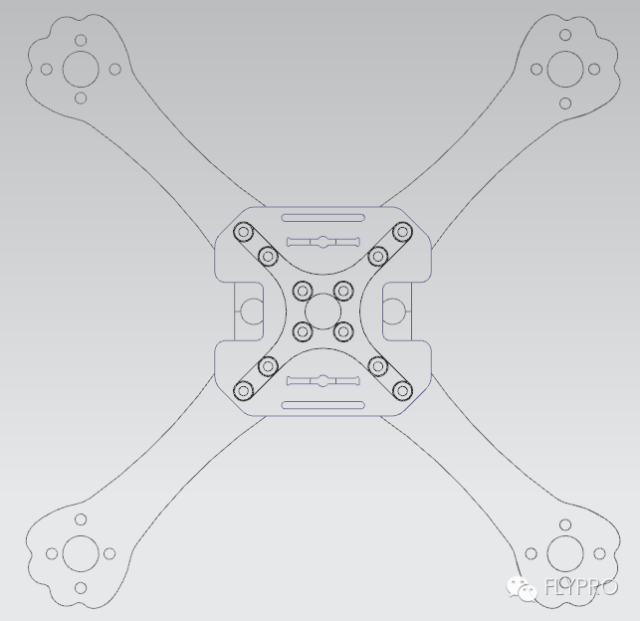
最初设计机架向外伸出的部分为直的,碳纤宽度16mm厚度3.5mm,此机架经过大量摔机测试强度已有过多的冗余设计;此设计足以保证在高速飞行出事故时不会机臂断裂,但此种形状的机臂有个缺陷,风阻过大且不美观;经过好几个日夜的讨论决定;最终把机臂形状由直线形改为圆弧形;削去多余部分减小了风阻和重量,增加速度和续航时间;但为做到万无一失,我们特意将机臂厚度由以前的3.5mm增加到4mm;尽可能的让机臂更强;另外还有一个细节,就是电机座我们改成豹子的爪子造型,配合豹头机身,更浑然一体,如图:
由于一部分炸机是由机臂先着地,我们特意把机臂头部更改比以前更大,这样防撞击能力更强;为了更美观还把机臂顶端做了一些小小的修饰,与之前的相比现在机臂已不再是一条线那么单调了;设计成豹爪的电机座造型也更美观。
三、结构复杂,装机困难
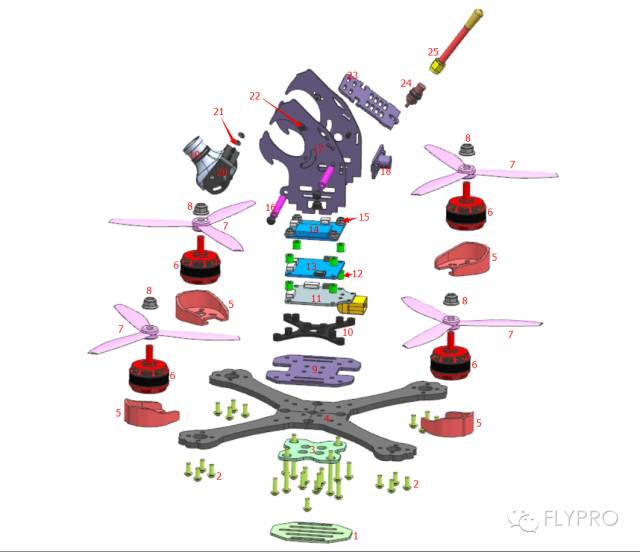
XJaguar豹力竞速穿越机组装极其简单,先看看安装的说明图,极其简洁:

即使刚入门的小白看了说明也能在极短时间内组装完一套整机;首先只需10多分钟把机臂和主板部分装好;再用不到10分钟时间将摄相头灯板图传天线以及豹头侧板用螺丝锁紧;下图实物组装的图片更具说服力:

当装到这一步时,基本上就要装完了;下一步只需要将豹头部分的三个带端子的线与集成主板的端子连接在一起;后再将豹头最下面的两个螺丝锁紧就可以了。

最后就是装上桨叶电池,调试完后就可以爽飞。
四,动力系统选型不合理
穿越机的动力系统包括电机,电池,桨叶以及电调;
>>>我们的动力系统:电池放电倍率更大、电机功率更强、4合一电调的刷新速度也更猛,如图:




>>>2205 2300V电机配100C 1300mAh 4S动力电池5045三叶桨以及四合一电调;这样的组合是经过无数次暴力测试精挑细选的结果。
五、市面上的穿越机部件类似“万国造”,质量良莠不齐
XJaguar豹力竞速穿越机的每一个部件大到机臂,小到螺丝,全部都是有相当规模的生产厂家经过严格的品质把关而出;每一个部件都精雕细琢;呈现在您面前的就是一个精品;没有一个配件是东拼西凑出来的。
说到此我不得不说一说我们豹头上面螺丝定型方案;市面上的穿越机螺丝在网上随便都可以买到,价格很便宜;最初我们也是这样做的;所有螺丝全是用SUS304 材质M3本色不进行任何外观处理;经测试豹头最前端用M2螺丝强度已够,前端螺丝螺丝母换成M2后节省不少重量;紧跟着问题来了,一般的螺丝都是不锈钢本色或是碳钢发黑处理,我们的豹头可是红色的啊!如何选择?
当时我们选用铝材质氧化成红色的螺丝,测试结果让我们汗颜;氧化成红色铝螺丝虽然可以和豹头融为一体,但它的强度实在是不敢恭维;最终经讨论我们决定豹头螺丝全部单独订制!用SUS304喷红色油漆,为了我们那帅气的豹头,我们也是蛮拼的!从机身螺丝的设计选型都务必精益求精,这是我们做这款豹力竞速机的态度。
最后总结飞豹XJaguar豹力竞速机的
7大优势:
塔式飞控、电调、图传:优势是体积小,重量轻,布线少,重心集中,组装迅速,方便用户DIY。在专业穿越机上,为了达到更快的速度,机器就必须做到大桨,小机架(风阻小),重量轻。而小机架所面临的痛点就是线太多,布不下,而且也不美观。我们的塔式设备可以解决这一系列的问题。减重量也是所有飞行器所面临的最大挑战(尤其是竞速机上),少布线可以让飞行器更轻,飞行速度以及飞行时间会有所提升。
创新铝合金豹头外观:让机身浑然一体,简约漂亮;铝合金机身还有利于电调,图传的散热,让硬件性能发挥更好;
SP Racing F3飞控:加上Cleanflight的固件,有非常稳的手动模式,目前绝大多数穿越机都用它。
极致的动力:采用高性能电机,目前在相同级别的电机中,是最暴力的电机之一,单电机升力可以达到1300+g的动力,整机升重比为10:1
采用四合一BL程序的电调:支持2S-6S电池30A(目前使用的是4S电调,6S是未来的必须用到的),支持Oneshot125,输出频率达到18KHZ,响应更加迅速。
标配4S 1300mah ROC进口电芯:100c放电,内阻小于30mΩ,飞行暴力,电池温度低。
采用RunCam即将推出的镜头,RunCam Swift(雨燕):此镜头是RunCam目前已发售最主流的摄像头,采用1190方案,在夜间、弱光、逆光等环境下表现都比较出色。