一飞论空航 | 冷门的有人直升机无人化改造最难懂?资深老司机十分钟教你get新技能
转载 2017-03-31 10:50 来源:一飞论空航
导语:作者吴厂长系中科院沈阳自动化所博士,8年无人机前沿领域老司机【资深专家】,改机无数,现任一飞智控(天津)科技有限公司研发中心总监。
本文干货十足,需要一定航空背景方可较快理解。作者吴厂长系中科院沈阳自动化所博士,8年无人机前沿领域老司机【资深专家】,改机无数,现任一飞智控(天津)科技有限公司研发中心总监。
世界上总有那么一小撮人在干着一件冷门、难于常人理解的事儿而乐此不疲。
早年通航领域里相对小众的无人机市场,堪称“养在深闺人未识”,而今也已变成一片红火。难道还有比这更冷门的?今天一个资深老司机教你get一项新技能——有人直升机无人化改造。

时至今日,有人直升机无人化改造仍然是一个不被大众所熟知的技术领域。原因在于1)特定的应用范围导致客户群体并非大众用户 2)相关方向的介绍和报道都比较有限。
但从整体趋势来看,不管是一直持续旺盛的军事应用、不断探索的大范围勘测,还是到现在日益关键的物流运输,有人直升机无人化改造是一个被实际需求不断推动发展的滚动雪球,未来前途是星辰大海。

本文将尝试从为什么需要进行有人直升机的无人化改造、有人直升机无人化改造的流程方法有什么特殊性三个方面,对这一方向进行简要介绍。一方面希望剥开罩在它身上神秘的面纱,让大众认为遥不可及的庞然大物变成你我都能理解接受的一种工具,同时也希望能够吸引更多的有志青年加入这一队伍,从新手变成老司机,共同推动这一方向的发展。
1.为什么要将有人直升机进行无人化改造?
要回答这个问题,借用小岳岳说相声时的一句台词:小怎么了?小难道就满足不了你了吗?停住打岔,用一句话来概括:因为我们需要大型无人直升机!

注意!这不是一句玩笑话。因为这个回答又涉及到两个复杂一点的问题:一是为什么我们需要大型无人直升机,二是为什么需要大型无人直升机就要进行有人直升机的无人化改造。
如果你还没被绕晕,接着往下看。

首先我们先对大型无人直升机进行简单的定义,大型无人直升机顾名思义所谓的“大”主要体现在三个方面:一是载重大目前一般的旋翼无人机载重十几公斤,大型无人直升机至少得奔着100公斤去;二是飞行时间长目前一般的旋翼无人机续航在半个小时左右,大型无人直升机根据载荷和油料的配比,续航时间可达到2-4个小时;三是飞行半径大覆盖范围至少也是20km以上。
虽然目前多旋翼占据着无人机市场的大半壁江山,但大型无人直升机在一些特定的应用场景依然无法替代,而这些场景主要特点就是上述三个特点:大载重、长航时、覆盖广。大型无人直升机的应用早期主要由军事应用牵引,替代有人直升机执行战场任务,实现战场零伤亡是其主要目标,同时智能化是主要出发点。

美国黑鹰直升机
基于此,只需要大型无人直升机的主要原因,也是考虑到因为军事应用中许多的任务载荷的重量,还有飞行时间的要求,使得小型无人直升机无法满足要求。
战场环境下的军事应用以战术侦察、生化侦察、精确目标定位与打击、配合舰船反潜等为主。在这些应用中所需挂载的设备,如光电吊舱重量普通在40公斤以上,挂载的最轻型导弹单个也在20公斤以上,通常的作战任务不可能只搭载单种任务载荷,大部分情况下是多种任务载荷的配合作战,这对无人直升机的载重量要求随任务的复杂度要求更高。除了军事应用外,针对长距离复杂环境下的物流运输、大范围的森林防火等应用,都需要大载重量和长航时的大型无人直升机。
了解完大型无人直升机的应用领域后,我们现在知道这家伙其实相当重要。那么,为什么不通过正向直接设计进行大型无人直升机的研发,而必须通过有人直升机无人化改造来实现呢?简单说起来就是受限于当前的技术水平瓶颈,直升机结构设计太复杂了!

直升机的结构设计复杂度主要集中在发动机及传动系统设计、机身气动布局设计、旋翼头传动以及旋翼变距挥舞铰的设计等多个方面,一个成熟直升机型号的设计所要经历的过程复杂程度远非现在常见的多旋翼无人机所能比拟。
目前,通过正向结构设计实现的最大载重无人直升机以奥地利Siebel公司的S100为代表,其最大载重量也仅仅50公斤,这一指标基本是目前正向设计无人直升机的极限。
正面不行,那么另一个开发途径就只好选择有人直升机无人化改造了。无人化改造的基本思路是沿用有人直升机的发动机、旋翼、传动等主体结构,通过对其进行结构改造和电气改造,加装飞行控制系统,即可实现无人自主飞行飞行。

火力侦察兵
这其中最成功的案例当属“火力侦察兵”。它是目前世界上已装备使用的最先进的无人直升机,美国海军的目标是将“火力侦察兵”发展成为一种多功能武器系统,承担海上巡逻侦察任务,进行反潜、反舰和反水雷作战,是海军舰艇的有力支援。
火力侦察兵先后发展了多个型号,RQ-8A到MQ-8B到MQ-8C:早期版本RQ-8A保留了Schweitzer 333有人直升机的主体结构、发动机、旋翼和传动系统等主体结构,同时对外形进行重新设计以提高飞行速度,对油箱进行改进以增加续航时间,最终起飞重量可达1200kg,该机在2002年1月完成首次飞行后,于2005年7月成功试射2枚MK66型无制导70mm火箭弹,初步证明了其军事价值。后续的MQ-8B和MQ-8C针对更大任务载重量的要求,重新选择了两款有人直升机进行无人化改造,但是仍保留了类似的飞行控制系统和体系编号。
除此之外,目前最有名的几种型号大型无人直升机还有无人小鸟OH-6、K-Max等,都是基于有人直升机进行改造,全部由美国军方支持开发。火力侦察兵和无人小鸟的研发由海军主导,主要面向舰载应用,实现近距离反潜作业,主要的技术关注点也在于自动舰载起降方面,K-Max的研发由陆军主导,主要考虑战场物资运输,着重考虑飞机在吊挂重载荷下的稳定性。

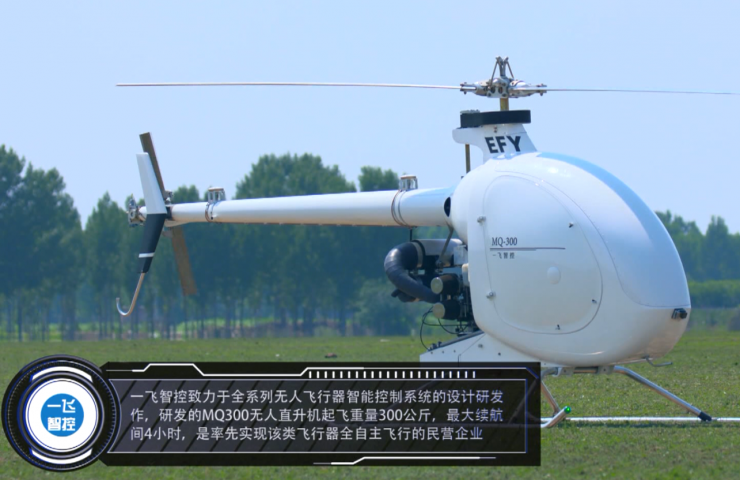
一飞智控的MQ-300
火力侦察兵的技术成功,也推动了国内相关单位有人直升机无人化改造的工作:潍坊天翔航空联合相关单位实现了国内首架有人直升机无人化改造V750,中航工业直升机所的AV500、AV1000,总参60所的Z5、Z6,一飞智控的MQ-300,中科院沈自所的翔鹰-200都是在有人直升机的基础上进行无人化改造形成的大型无人直升机,更大型号的有人直升机无人化改造工作也在逐步推进。这些型号的大型无人直升机在军事侦察、森林防火、海事巡逻等方面都进行了大量的应用,逐步形成了体系化、成熟化的平台。
结论
当然有人直升机无人化改造也并非十全十美,由于载人的需要,有人直升机设计会考虑一些额外的结构设计,会造成部分有效载重量的浪费,但从目前阶段来看总的来说利大于弊。
2.无人化改造的具体流程和关键点是什么?
现在是作为一名老司机“吹嘘”的荣光时刻了:看着一架大型直升机在那无人自主飞行,听着旋翼和发动机轰鸣的声音,尽管经历过多架飞机的改造和多次的飞行,但每次仍会感觉震撼。
这种声音配合下的现场感远非不在现场的人员所能理解,这种震撼其实无形中也拉开了观众和大型无人直升机之间的距离。别急,这次老司机就以MQ-300无人化改造过程为例,通过对其中一些关键技术和流程的介绍,希望有志之士能够加深认识,早日加入我们老司机的行列中来。
a)飞机本体结构改造

目前有人直升机无人化改造的对象在直升机谱系中属于轻量级,这一级别飞机的特点有两个:1)发展历史较长,飞机本体相对成熟,飞机本体的技术经过了众多的直升机驾驶员的验证;2)机体操纵机构以连杆传动操纵为主,并不具备在中型、重型还有商务型载人直升机上普遍采用的电传机构(电传操纵机构是实现直升机辅助驾驶或者自动驾驶的基础)。
飞机结构改造的第一步即是进行传动机构的电传改造工作:1)改造工作首先是针对原有手动驾驶传动机构进行分析,摸清楚传动操纵的基本结构布局 2)而后结合机体布局和具体的连杆机构选择合适的地方下手,确定操纵执行舵机的安装位置,然后拆除部分不需要的有人驾驶操纵机构3)最后就是设计舵机的安装方式、与操纵连杆的配合方式。

BL S254舵机
传动机构改造中风险最大的点即是舵机类型和舵机参数的选择。考虑到目前改造的直升机以轻量级飞机为主,一般不会采用液压驱动器,而是以电传舵机。电传舵机又分为旋转舵机和直线舵机两大类,这两者并无优劣之分,主要考虑到与原有连杆机构的配合便利性,同时还需要考虑到操纵的线性度。此外根据的飞机和连杆结构,对舵机的具体指标参数要求会有很大差异,通常来说根据旋翼、连杆能够进行粗略的舵机扭力或者推力计算,以此为参考进行舵机的初步选型;在随后的飞行试验中,即可通过舵机反馈的实际输出力矩值确认实际需要的参数指标。
在MQ-300中我们采用了旋转式操纵舵机,同时舵机配备了电流反馈,可以实时进行舵机输出力矩的监测,用于确认舵机的实际输出力矩在舵机标称范围内,保证飞行的安全。主旋翼采用三个舵机进行驱动,油门和尾旋翼采用单独的舵机进行驱动,所有舵机采用485总线进行控制,可以实时监测舵机的位置、电流、电压等反馈信息。
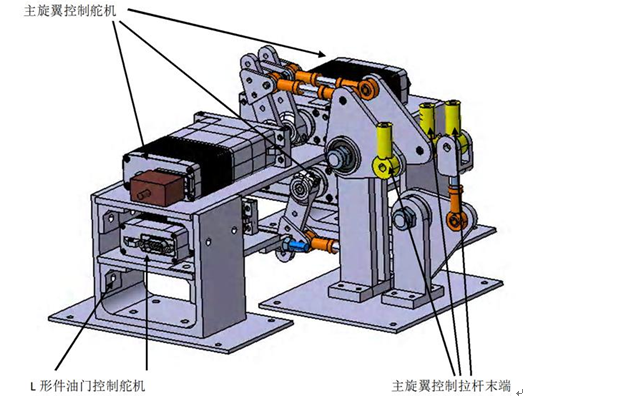
MQ-300操纵舵机的传动结构设计
在完成传动机构改造后,针对无人直升机任务载荷的需求以及飞行速度的要求,可能还需要对飞机脚架、飞机总体外形气动布局进行调整,这些改造的过程会涉及到直升机气动力学、振动力学等多种因素,通常都是结合仿真分析和实验进行测试确认。
b)飞行控制系统集成
传动机构和机身结构的改造代表着直升机具备了无人直升机基本的手脚和身体,要实现全自主飞行所缺的大脑就是飞行控制系统。对飞行控制系统的要求从任务层面上来划分:最底层的发动机转速控制、飞机航向稳定控制、机体状态监控是基础,手动操纵辅助控制是入门,悬停控制算及格,具备了航线飞行、自动起降、故障诊断与容错就算是优秀,更进一步的环境感知属于加分项,技术发展的道路没有尽头。
从飞行控制系统涉及的技术点与普通无人机类似:1)传感器是基础,包含IMU、GPS、气压计、磁罗盘、温度传感器、压力传感器等等,这此传感器监测飞机的机体状态和飞行状态,作为反馈提供给飞行控制系统;2)飞行控制律是核心,需要结合所有反馈的信息,按照设计的飞行任务,进行控制律的计算;执行机构即上述的舵机执行控制律计算的结果操纵飞机按照设定任务进行飞行。

当然,所不同的是对飞行控制系统稳定性的要求非常严格。一方面是标准,目前的大型无人直升机主要面向军事应用,安全性能要求自然得按照军用标准来,另外一方面也是由于大型无人直升机成本较高,摔机后的风险过大,要尽量保障飞行安全。
为满足这一要求,从传感器系统的冗余设计,到控制器的冗余设计,甚至到执行机构的冗余设计都要综合考虑。结合具体的飞机本体、应用场合、系统成本,进行针对性的冗余设计是常用做法。

一飞智控Finix3000直升机飞控
从具体的技术特点上来说,关键的技术是飞行控制律的设计。大型无人直升机的旋翼头、主旋翼、尾旋翼与小型无人直升机相差甚远,从飞机的气动力学模型和小型无人直升机差异巨大,操纵响应延时、通道耦合等因素无疑都使得大型无人直升机的控制律设计更加复杂,外加上飞行试验的高风险性使得控制律的调整更加困难,通常来说需要有一定的系统辨识、控制理论、直升机动力学等相关的技术积累才能保障控制律设计的合理性、有效性。
所以,一般会在无人化改造之前,通过有人直升机驾驶员试飞搭建传感器进行飞行数据采集,根据飞行数据辨识建立初步的动力学模型以供飞行控制律设计参考。
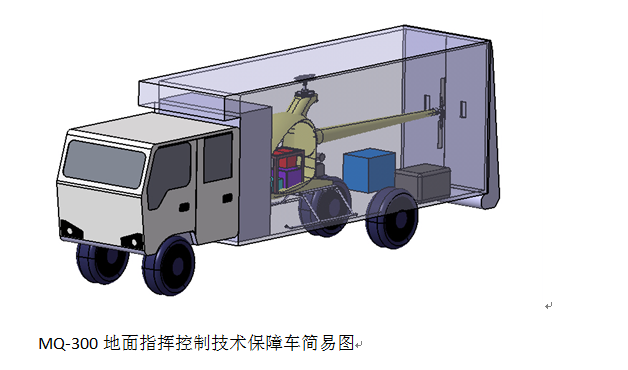
c)指挥控制技术保障车设计
指挥控制技术保障车主要用于为无人直升机提供指挥控制、储存运输、保障服务。保障车的主要原因是无人直升机体积过大,转产运输需要专门的车辆和结构设计,通过在车体上加装方舱、液压升降台,可实现将无人直升机搬运至方舱内部,将方舱内部空间用于储藏运输无人直升机、载荷及其他设备。

在车中同时也集成了地面指挥控制系统,用于完成无人机飞行状态的在线监控、无人机任务指令的发送、无人机任务载荷的操控和图像实时接收处理。1)地面控制系统可以完成无人机轨迹设定、遥控指令下达、直接遥控操作、无人机飞行轨迹显示、飞机状态显示、任务载荷图像实时显示/存储/离线检索回放等一系列功能。2)测控系统通常由专业数据链路供应商提供,分为机载端和地面端,地面端集成在地面指挥控制系统中,实现指挥车与无人机的实时通讯,支撑上述各项功能的具体执行。
d)飞行测试流程方法
飞行测试是有人直升机无人化改造的最终环节,也是检验所有改造工作的关键环节。由于大型无人直升机系统的复杂性,飞行测试必须遵循一定的流程规范,将各个环节的风险降至最低,不将遗留问题带到空中。

从飞行试验的安全考虑,无人直升机的飞行试验按照循序渐进的原则,通过逐步验证,降低飞行试验的风险。具体的飞行试验阶段包括航电安装集成静态联试、地面固定系留飞行测试、首飞测试、调整测试、验收测试等多个环节。
将所有相关设备进行集成,确保系统的功能正常稳定。集成的内容包括飞行控制系统、电气系统、电源管理系统、舵机控制器、飞机改造结构、飞机本体等多个环节。1)首先是要确保按照系统设计要求,各个模块能够正常工作,达到全系统联通状态;2)其次是调整输出舵机行程范围、标定传感器范围、测试系统功耗、长时间拷机评估系统稳定性,这其中的每一项工作都需要电气工程师、结构工程师等的协调配合,针对在设计初期没有考虑到的集成问题进行现场处理。

无人直升机不同于其他装备的区别就在于飞机启动后,发动机和旋翼均处于高速旋转状态,会产生较大的振动和电磁干扰,严重时会影响机载航电和舵机机构的正常工作。
地面系留飞行测试,就是在保证飞机安全的情况下,通过地面试车验证发动机控制的稳定性、机载航电设备的稳定性,同时通过近地起飞测试验证舵机输出力矩在合理范围内。
系留通过分为两个阶段:第一阶段是将飞机固定绑死在地面,启动飞机发动机,低速旋转确认所有传动系统和航电系统正常工作,而后发动机转速控制介入工作验证发动机转速控制律;第二阶段是飞机通过系留绳绑在地面,允许一定的活动空间,无人机操纵手尝试通过遥控器控制飞机起飞降落,初步调整辅助飞行控制律。经过这两个阶段的长时间验证,表明飞机已经具备了放飞的能力,可以转入首飞测试。
由于大型无人直升机尺寸和起飞重量均较大,首飞测试一般选择比较空旷的民用机场确保飞行测试周边空域无明显障碍物,事先申报空域确保不影响通航安全。
首飞测试时飞机不再受地面系留约束,可以进行自由飞行,由无人机操纵手在辅助飞行控制的帮助下,尝试将飞机升空进行简单的操纵,确认飞机前后、左右、上下、转向等基本的飞行动作是否可控。

同时结合事先设定的控制律尝试进行悬停飞行。此时作为无人机操纵手的压力是巨大的,需要在控制律出现异常需要调整时能够及时切换到手动遥控飞行模式,将飞机安全降落。
在飞机悬停和小机动飞行正常后,即可逐步放开速度限制,逐步测试飞机航线飞行能力,验证飞机的最大飞行速度。自主起降测试通过会放到后面阶段待飞行控制律稳定后开展。首飞测试的完成标志就是飞机具体了基本的自主飞行能力,初步实现了从有人直升机向无人直升机的转变。
调整测试则是针对首飞测试的问题进行调整,逐步验证飞机的所有指标,同时针对一些特定任务需求还需要与载荷系统联试。这一阶段的工作更加繁重,需要测试无人直升机在不同地区、不同海拔、不同环境下的性能指标,针对测试过程中发现的各种问题进行调整改进,直至满足要求。最后能够根据指标要求完成验收测试是有人直升机无人化改造的标志性节点,标志着飞机改造成功。

未来无人直升机的发展将超乎想象
结论
实际有人直升机的无人化改造,当然不可能只是如上面所说那么简单,每个简单的环节都可能成为改造工作中的拦路虎,但只要我们有团队配合,愿意去深入地发现问题解决问题,有人直升机的无人化改造并非不可能。
相关资讯
更多- 以练筑防,安全护航|异能无人机开展园区上半年消防应急实战演练
- 【精飞要闻】娄底市生态环境局涟源分局CAAC民用无人驾驶航空器操控员执照培训班正式开班
- 石家庄市副市长李为军一行调研星逻智能
- 亮相2026大连夏季达沃斯论坛|无距科技电动纵列双旋翼无人机,以硬核创新对话全球
- 喜报 | 星逻小蓝机器人荣膺德国红点奖+法国 FDA 设计大奖
- 蜂巢航宇邀您共赴第四届低空(苏州)产业创新生态大会
- 东莞市2026年全民终身学习活动周正式开幕——共赴终身学习之约
- 城市品牌赋能,智翔助力 | 杭州市民日沉浸式科普,为青少年解锁“飞行第一课”
- 纵横大鹏CW-100参与“应急使命·2026”国家级防汛演习
- 慧明捷资讯|科技赋能应急!慧明捷灭火无人机+照明无人机助力2026四川省“安全宣传咨询日”活动