压电马达工作原理及分类
转载 2019-08-21 11:14 昊量光电 来源:昊量光电
导语:由于压电马达具有体积小精度高等优势,目前越来越多的用户选择该产品替代传统的电机定位产品。目前市面上常用的压电马达有三种:粘滑式压电马达;步进式压电马达和超声波或共振压电马达。这三种类型都有其特定的有点和用途,下文会通过原理详细介绍这三种压电马达。
压电马达原理简介
1)粘滑式压电马达
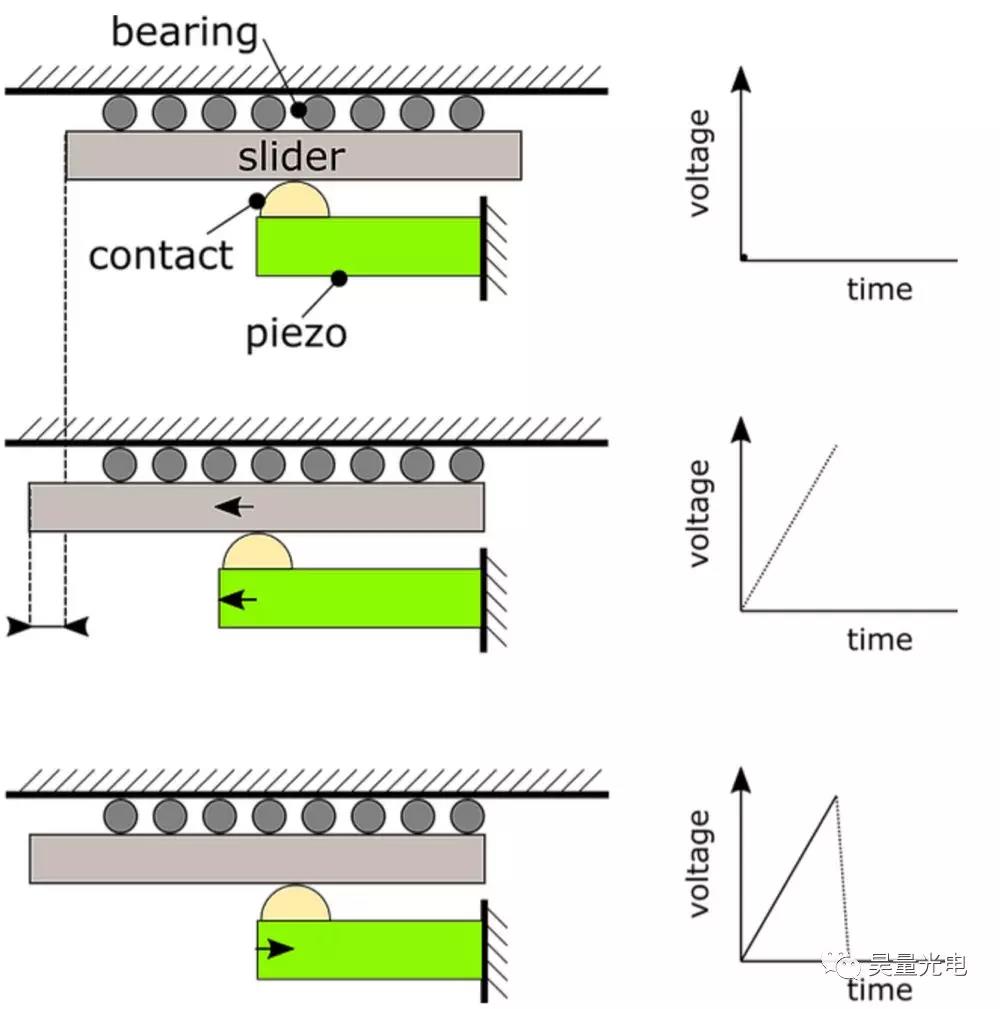
图1、粘滑式压电马达工作原理图
如图1所示,阐述了粘滑式压电马达的工作原理,粘滑式压电马达主要由轴承、滑块(即移动部分)、接触点、一端固定的压电促动器组成。压电陶瓷的的长度随着施加电压的变化而变长或变短,由于滑块与接触点的摩擦力滑块会随着压电陶瓷的形变一起运动,如图1中第二个图所示。这一过程又称为粘贴阶段(stick-phase)。当压电陶瓷到最大形变量时,施加快速降低的电压使压电陶瓷快速回缩到初始状态。如图1中第三个图所示,由于惯性滑块保持静止,而压电陶瓷回复到了初始状态,这一阶段也被称为滑动阶段(slip-phase),也是这一阶段导致了滑块的净位移。重复以上两个阶段使平台产生宏观的位移。
2)步进式压电马达
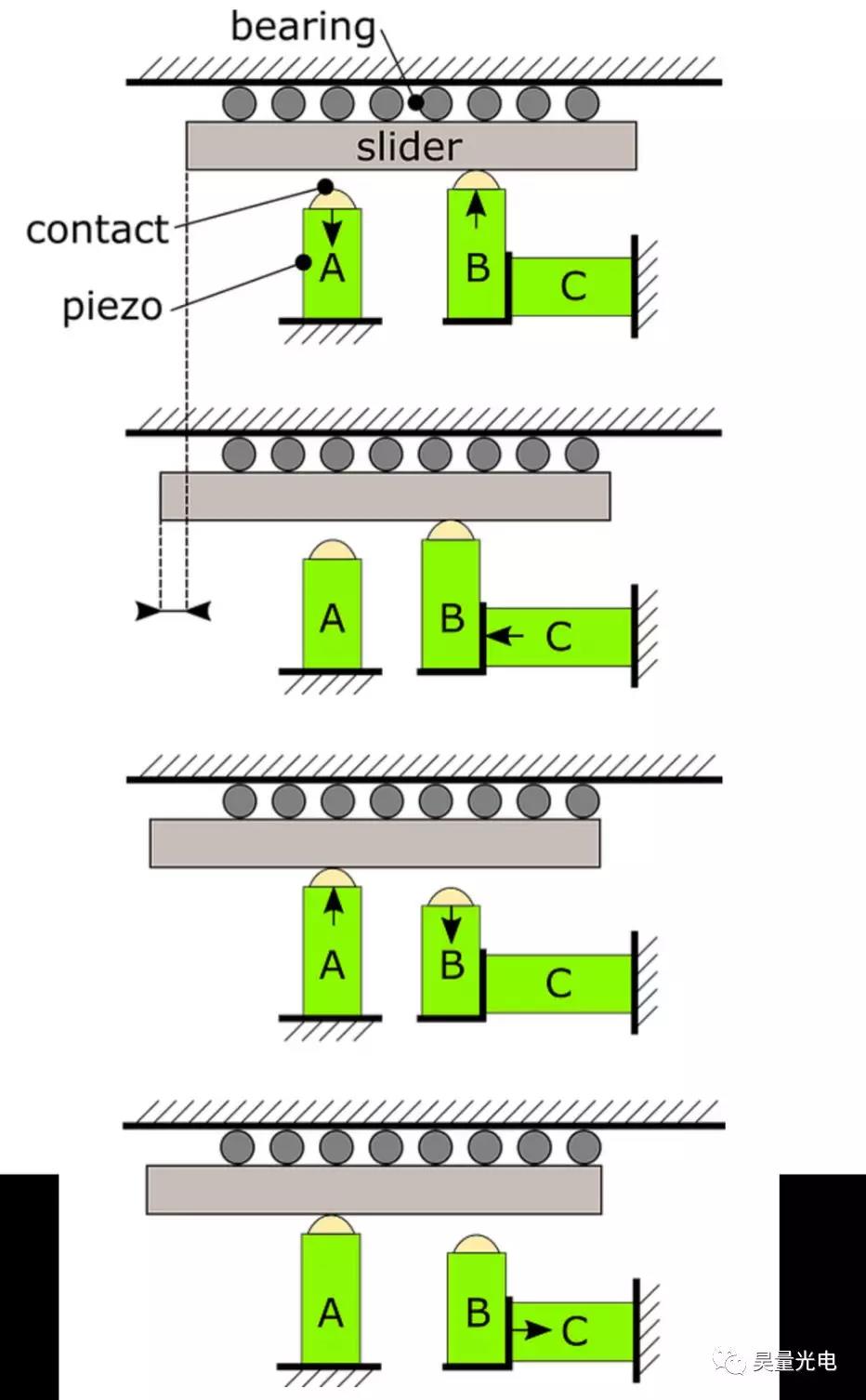
图2、步进式压电马达原理图
典型的步进式压电马达至少由3个压电促动器,如图2中的第一幅图所以,其中A和B促动器用来接触滑块,并扮演卡紧机构的角色。而C促动器则用来使滑块产生平移运动。
在静止时,促动器A和B同时接触滑块。当开始运动时,促动器B膨胀,A缩回,此时只有B与滑块接触,如图2中第一幅图所示。于此同时C形变通过B与滑块的接触使滑块产生位移如图2中第二幅图所示。然后促动器A膨胀,B缩回,此时只有A与滑块接触如图2中第三幅图所示,随后压电陶瓷C缩回至初始位置如图2第四幅图所示。最后再次缩回A,膨胀B,重复以上状态是滑块产生宏观位移。
3)超声波压电马达
对于这种类型的压电马达,滑块的运动是通过接触点的椭圆振荡产生。如下图所示。
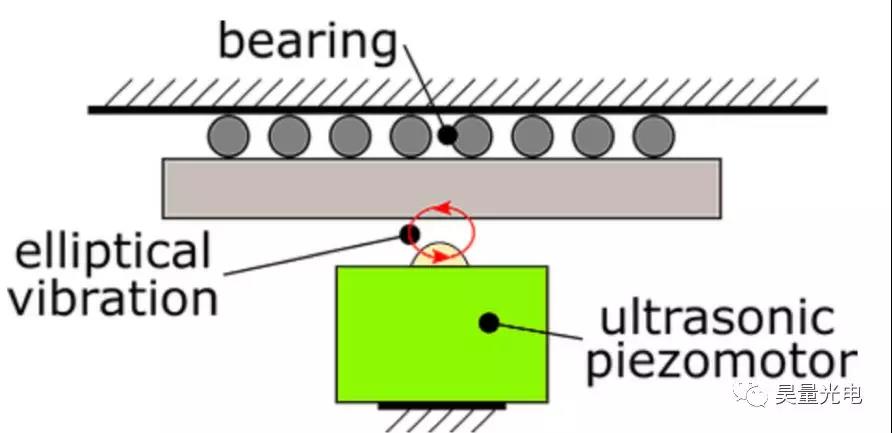
图3、超声波马达原理结构图
图3中的第一幅图展示了超声波马达的主要结构,第二幅图展示了压电马达的两种工作状态,左图接触点沿切线方向移动,即运动方向,右图接触点沿上下运动。对压电陶瓷施加电信号,同时产生这两种模式,并使相位差为正负90°这会使接触点产生椭圆振动如图3中第一幅图所示。此外,接触点的轨迹也可由驱动信号的幅值和频率控制。
不同类型压电马达的特点
1)粘滑式压电马达
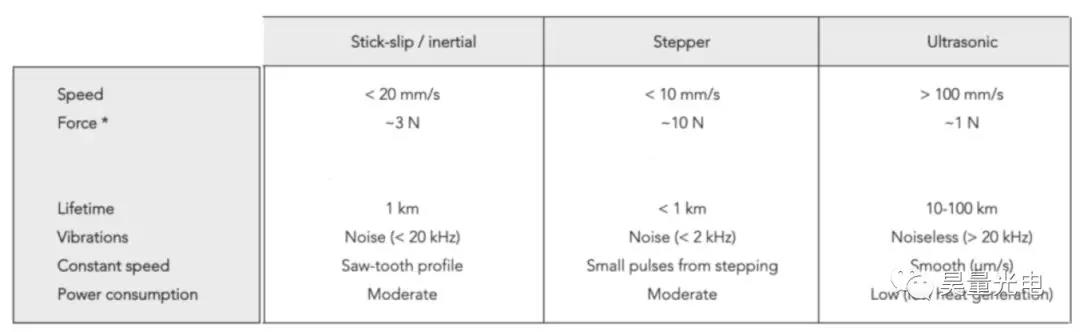
在粘贴阶段滑块的移动量即是压电陶瓷的形变量,因此对于该阶段,平台拥有较高的分辨率。在滑动阶段,压电陶瓷会快速缩回,这将产生振动和噪声,噪声可能非常刺耳,当人长期在平台周围工作时设置会引发健康问题。此外由于压电陶瓷需要往复快速缩回,导致接触点的材料大量磨损,限制了平台的使用寿命。粘滑式马达使用DC扫描模式时具有较高的分辨率,但是在断电的情况下并不能0漂移保持在纳米量级的定位。另外对于粘滑式的压电马达速度被限制在约20mm/s。
2)步进压电马达
步进式压电马达一般拥有较高的输出力,输出力高达10N。移动时由压电陶瓷形变推动滑块移动,因此可以达到较高的分辨率,可时间纳米级别的定位并且没有漂移。但是由于该类型马达的移动需要多个压电陶瓷配合,这限制了压电位移平台的速度,通常小于10mm/s。此外因为无法达到严格的公差,导致接触点的摩擦,导致了平台较低的寿命,此外该电机通常由多个压电陶瓷组合使用使其成本较高。
3)超声波马达
该马达是将椭圆振荡推动滑块移动,产生很小的位移,并通过高频率产生极高的速度,通常可达到100mm/s,并且没有噪声,良好的可重复性,电机在定位后无漂移实现自锁。并且拥有较长的使用寿命,通常在10-100km。但是该马达输出力较小,通常只有1N,位移精度会比其它两种马达略差。
三种压电马达技术参数对比
相关资讯
更多- 无人机 + AI 路桥智能体检|0 元合作,抢占市政养护蓝海
- 南京高校联盟亲子科创体验日 | 在零重力-鲲鹏天空,和孩子们一起打开低空飞行的大门
- 同济大学师生莅临嘉兴天旭航空飞行营地参观交流
- 聚力低空产业|无距科技签约入驻辽宁省低空装备试验验证与检验检测联盟
- “无人机+无人艇+定向能武器”一体化:美军推动多域无人作战
- 南非无人机续航破纪录:多旋翼无人机成功实现超过4小时的连续飞行
- 马来西亚森美兰州酋长到访中科云图,共探低空经济合作新机遇
- 喜报 | 智翔航空党支部荣获留下街道“先进基层党组织”荣誉称号!
- 嘉大学子走进天旭航空,共探低空经济“实战”密码
- 广东省科学院广州地理研究所与中科云图共建“低空智能感知技术与应用联合实验室”揭牌