![镁科众思科技(佛山)有限公司]()
![]()
![]()
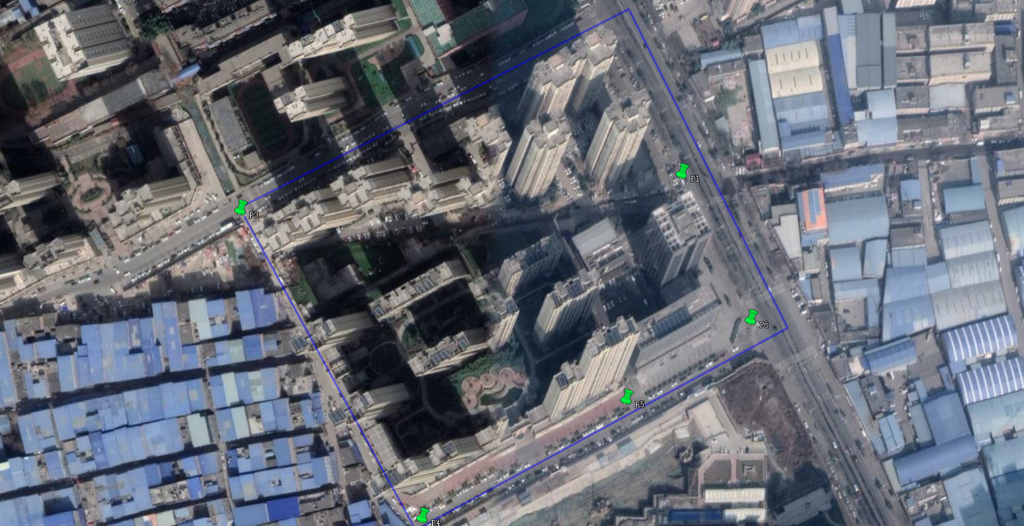
近日,Microdrones(镁科众思)飞行团队携mdLiDAR3000LR系统对西安市某科学园区进行城市测量项目,快速获取三维点云模型,生成DLG文件。数据要求:要求获取误差小于5cm的彩色点云文件,用户将使用该数据生成DLG文件。项目特点:经过Microdrones团队评估,项目的实施面临数个挑战:
测区位于商业中心,区内建筑物密集且楼层较高,其中最高的楼层有33层,接近100米;车辆川流不息,对路面点获取不利;起降条件复杂,对无人机安全性、稳定性要求非常高。
![]()
![]()
使用设备:mdLiDAR3000LR解决方案测区概览图
![]()
![]()
实施方案Microdrones端对端工作流程:
![]()
航线规划
演示区域是一片高楼区,楼高约100m,区域面积约300m * 300m;
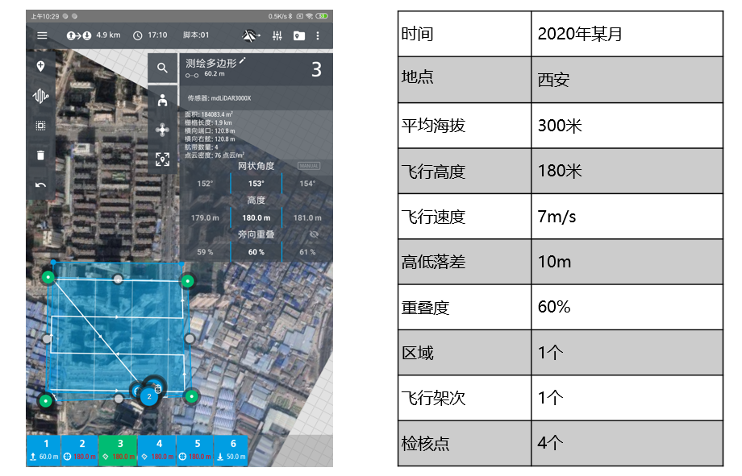
为了提高区域边界的数据效果,使用mdLiDAR3000 LR飞行时,飞行区域往外扩大了100m,实际飞行区域约为400m * 400m。飞行高度180m,重叠率60%;
为了提高建筑的立面效果,航线以63°和153°两个航向角进行数据采集;
现场另外使用mdMapper3000DµoG VHR方案再飞行了一个架次,进行点云着色。mdMapper3000DµoG VHR方案飞行航线高度设置为200m,重叠率设置为80% / 70%,飞行速度设置为5m/s。该重叠率设置较为保守,实际上该区域采用80% / 40%也可进行正射影像生成和点云着色。80% / 70%的设置将产生一些数据冗余。
![]()
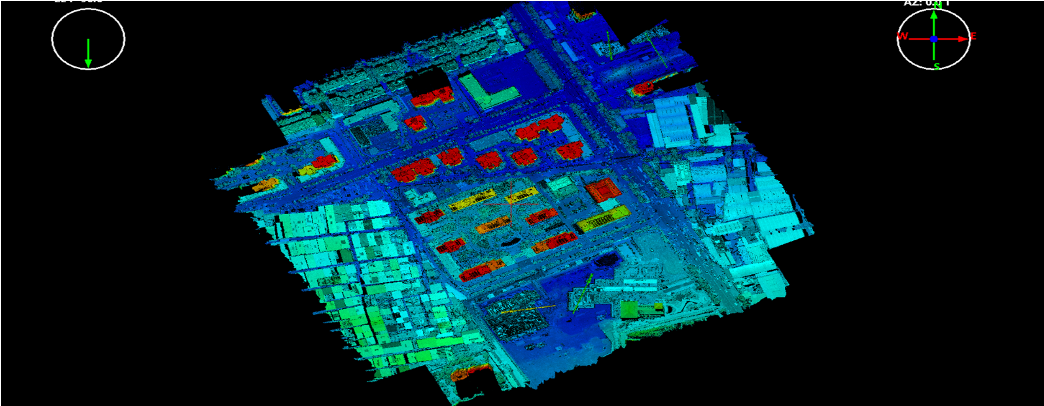
航测实施该案例中,Microdrones 使用了mdLiDAR3000LR 无人机集成系统,在演示区域飞行1 个架次,共扫描0.4km²,飞行高度180 米,使用交叉飞行的方式,采集了 GNSS 数据,机载激光雷达原始数据,惯导数据。经过处理得到了该区域的数字三维点云,点云密度为每平方米190 个点。
![]()
现场在已知点上进行架设基站,采集静态数据;
采用RTK打点的方式采集检核点,共计5个;GPS设备采用徕卡GS18 GNSS接收机。
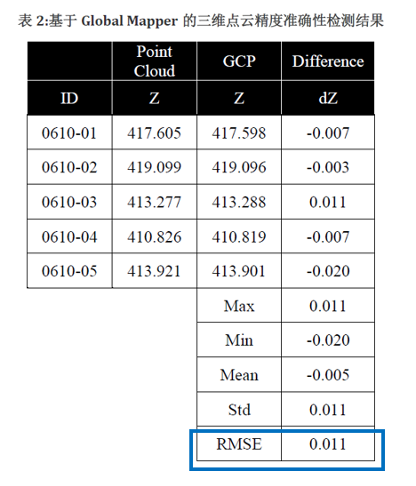
数据处理为了正确评估测绘成果的准确度,Microdrones 采用了以下方法:
使用Global Mapper 软件,导入Las 格式的数字三维点云。使用Global Mapper 软件,在点云上采集所有坐标已知的地面检查点。将点云上测量得到的检查点坐标与演示项目提供的已知点坐标进行比较。统计测得和已知的地面检查点的偏差,记录在表2 中。
![]()
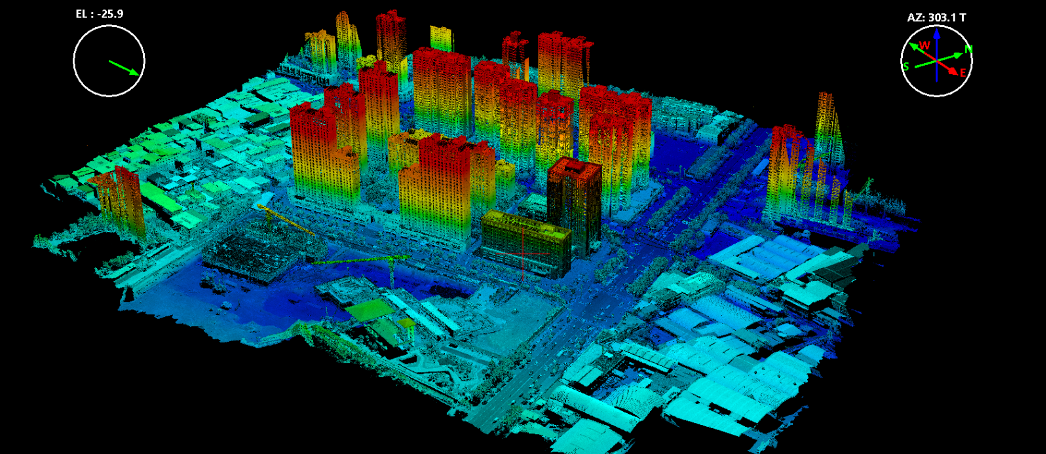
点云成果展示测区点云
![]()
![]()
![]()
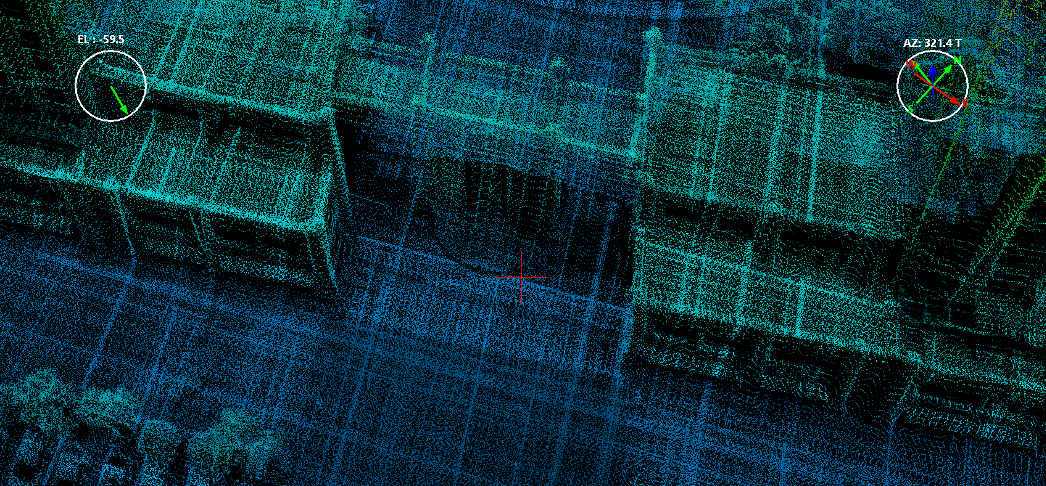
测区点云
![]()
![]()
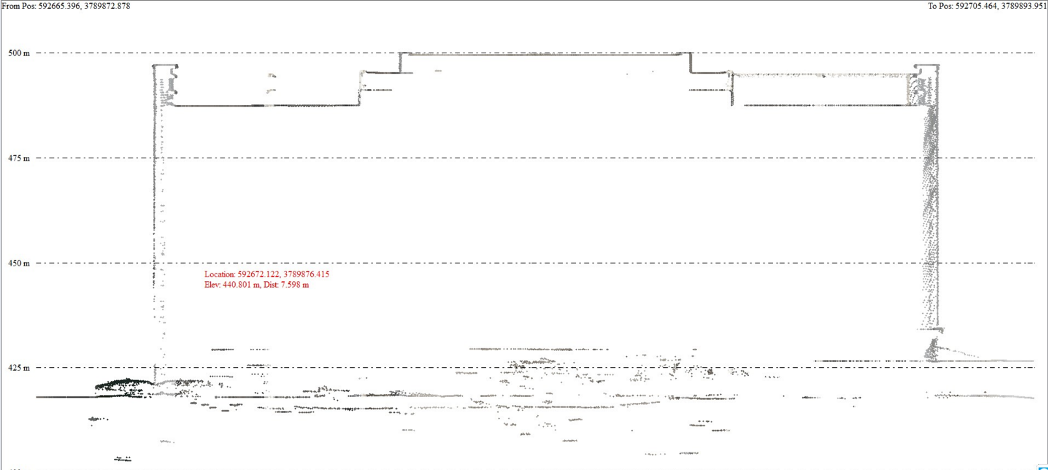
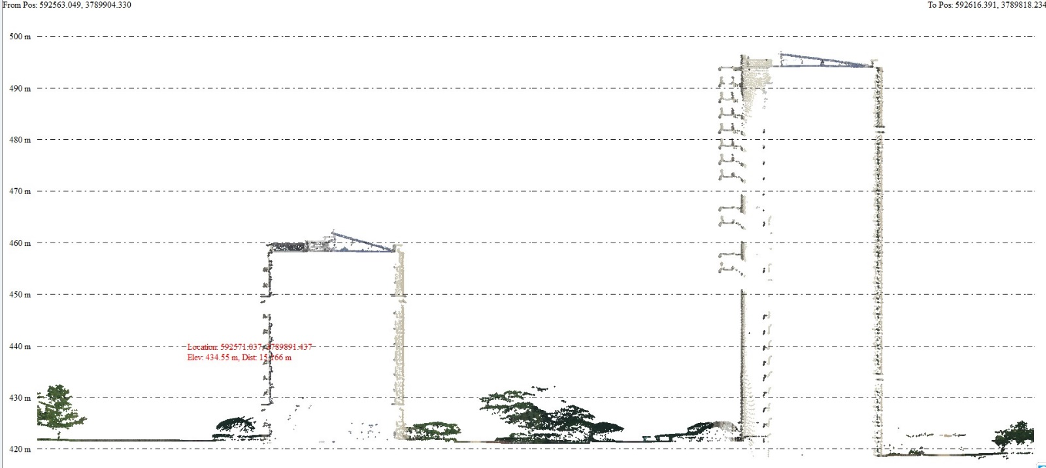
楼房断面
![]()
![]()
正射影像
![]()
项目结论•成果精度高(Z方向中均方根误差1.1cm);•飞行结束后,15分钟即可得到点云数据;•不受雨雾等天气因素的影响;•墙角立面点云采集效果好,适合成图。mdLiDAR3000LR 系统
![]()