“空地一体” 蜂巢航宇“集群智能”技术
转载 2022-06-21 10:23 蜂巢航宇 来源:蜂巢航宇
随着机器人、AI、无人车以及无人机等智能体的发展,单机器人不足渐渐体现。以无人机举例,在续航、探索、侦查等应用上存在较大的局限性。集群、编队、协作也进入了快速发展阶段,多架无人机组成的集群系统更适用于实际应用中的需求。

集群相对于单机来说,具有明显的规模优势,并且能够实现无人机之间的协作,在一些大规模应用场景以及一些复杂的任务中,有非常突出的优势。蜂巢航宇无人机集群技术的核心就是集群智能,那么集群智能是什么呢?简单的说,就是无人机群在人工智能的控制下,可以自动起飞降落、自主作业、多机自主协同、自主判断等能力,“智能”作业任务协同效率高,灵活性强,这种集群智能化的应用已颠覆传统作业模式。
蜂巢航宇无人机集群技术核心
集群控制算法
无人机集群系统要实现相互间的协同,就必须确定无人机飞行之间逻辑上和物理上的信息关系和控制关系。蜂巢航宇针对这些问题而进行的体系结构研究,将无人机集群系统的结构和控制结合起来,保证无人机集群系统中信息流和控制流的畅通。集群控制算法不仅要保证多无人机之间能有效地进行协同,而且不依赖于无人机的数量,即无人机可以随时退出或者加入集群,而不会影响控制系统的整体结构。
通信网络技术
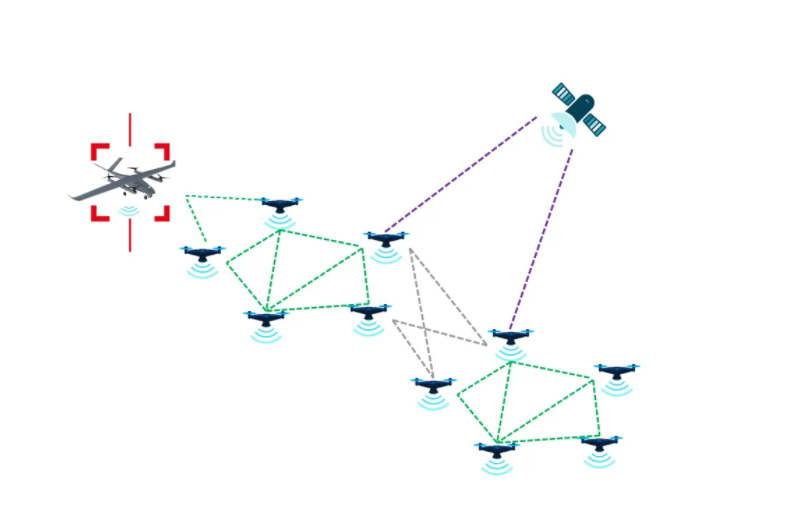
通信网络是无人机之间要通过数据链来共享信息,达到实时传递数据的效果。而这种共享信息,那可不是我们玩游戏“团战”时,队友之间简单的语言交流那么简单,而是建立一个庞大的数据链,实时共享各种信息,包括地形、风速、目标位置等等。在实战中,哪怕你只被一架无人机盯上,那么也就相当于被整个无人机群盯上。
控制算法与通讯技术的耦合
无人机集群化为了提高协同完成任务的效能,需要进行信息交互。为了使所交互的信息及时完整地进行传输,对于通信网络性能有一定的要求。基于通信质量约束的协同控制方法,就是在当前的通信服务质量约束下,设定无人机集群协同控制方法。在这种控制方法下,集群无人机的飞行既满足任务需求,又可以满足构造通信网络的性能需求,进行实时的数据传输,从而提高集群无人机协同完成任务的效能。
自适应协同技术

要求集群无人机成员能够做到根据共享信息感知彼此方位,自动协调,互相之间不撞在一起是最基本要求,能够根据形势步调一致,形成有利阵型则是更高的要求,任意一架无人机的退出或加入,都不会对系统组织结构带来影响,从而发挥更好的作业能力。
路径规划技术

无人机在实际飞行中如果存在突发状况,必须进行航迹重新规划,以规避危险。为满足协同工作时效性,重新规划所采用的算法必须具有实时、高效的特点。蜂巢航宇无人机可以根据集群算法领域搜索的特点,以参考航迹的突发危险作为领群航迹,在突发危险段进行领域搜索,而不需要对整条航迹进行修改,由此可以快速获得需要修正的航迹段,并替换原突发危险航迹段。整个飞行过程中,无人机根据获得的危险信息,不断修正航迹,直至达到目标节点。
编队控制技术

编队飞行是各国科研工作一直以来就追求的技术。其关键技术主要包括队形设计、气动耦合、队形的动态调整、航迹规划、信息互换以及编队飞行控制策略等技术。在侦察、目标打击、通信中继、电子对抗、战场评估和骚扰诱惑等方面,无人机编队飞行可以提高单次完成任务的效率。而在执行任务时,通过调整侦察设备,如吊舱的工作角度,使无人机群在较短时间完成对目标全方位立体拍照的任务,并进行数据的实时传输及处理。

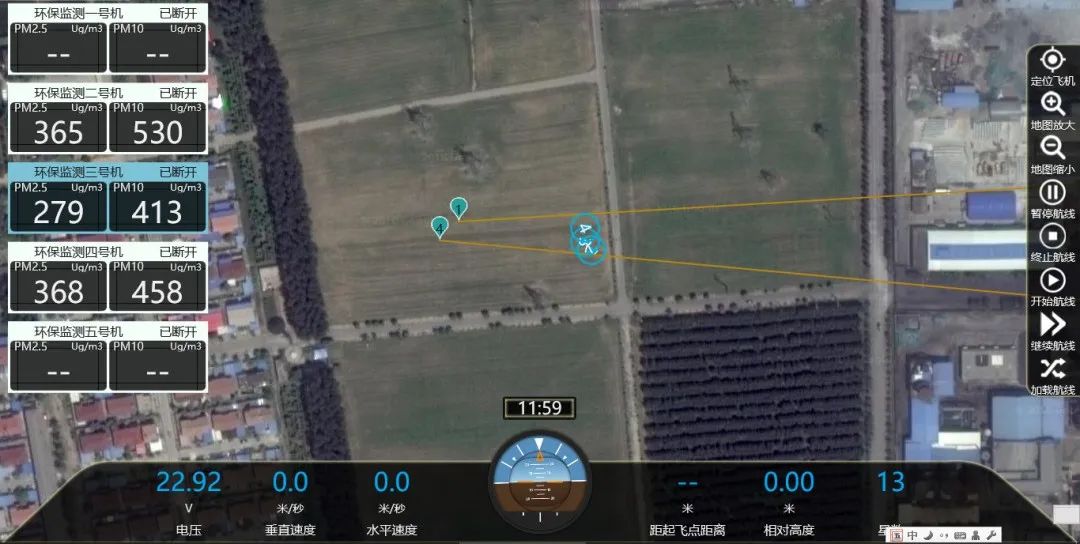
蜂巢航宇智能无人机巡检系统不仅为长距离带状应用场景提供最佳解决方案,也可满足行业定点范围内的精细巡检需求。整机展开、收藏、供电等自主完成。规划航线后可自主巡检,具备远程操控、多机协同作业,智能数据实时传输等功能,监测到的画面通过4G、5G/专网实时传给指挥中心,指挥室可以实时监测无人机巡检的情况。降低人员参与程度,在有序的规模化推广下提供出一种更便捷、智能的解决方案,真正实现全自主无人化作业。

蜂巢航宇无人机集群技术是智能的倍增,也就是要达到1+1大于2的效果。那么如何实现呢?就是利用无人机群庞大的数据分析与处理能力,打造一个共同的“大脑”,使整个系统高效运转,作战时实现自我判断,自主选择是否进行作业,何时、何种方式作业。
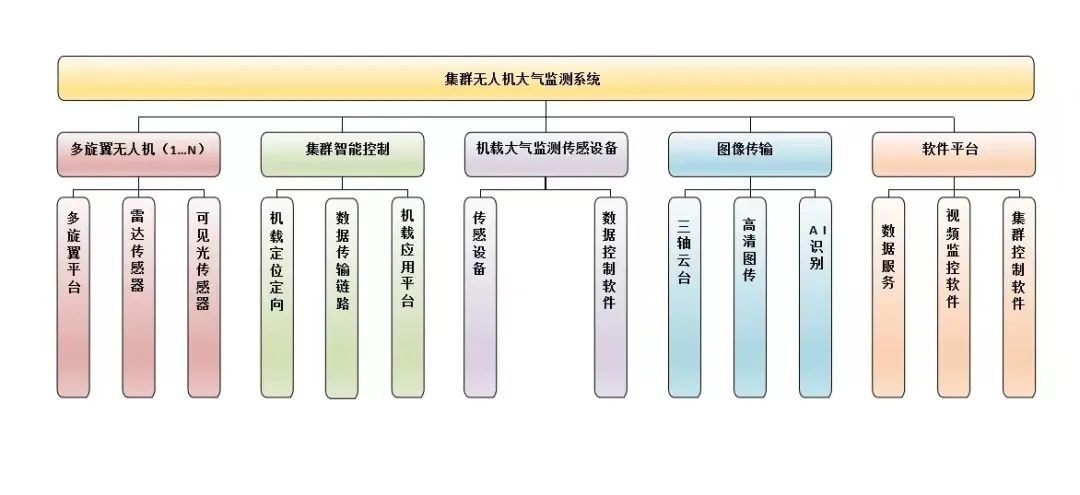
蜂巢航宇集群智能化系统具有“平台简单、高度协调、完全自主、群体智能”特点,可快速实现多种无人机单机和多机飞行任务,如悬停、航线规划、自主执行任务、数据实时传输等。已渗透侦察、安防等科技领域,而且也在农林环保、核安全应急、油气巡检、智慧城市、环境监测等国民经济发展中也有着广泛的应用。