用于空间轨道基础设施建设的机器人系统
原创 2023-01-14 09:42 倚歌 来源:无人机网来自英国林肯大学的创新机器人系统能够在太空中 "行走",并巧妙地执行复杂的在轨组装任务,包括安装和维护一个具有25米孔径的太空望远镜,这被认为是探索宇宙的未来。

经验之谈
虽然到目前为止,由宇航员自己在航天器外进行的活动对在轨系统和设备的服务和维护具有战略意义,但由于对日益复杂的基础设施的需要,它们在未来将被自主机器人系统所取代。
鉴于这种需要,林肯自主系统中心正在对E-Walker步行机器人进行重新设计,目的是有朝一日用它来组装比目前大得多的太空望远镜。
目前,新模型(一个小规模的原型)正在进行实验验证,以验证其有效性。下一步的研究将看到它的全面设计和开发一个小规模的原型,用于地面任务,包括维护风力涡轮机。
处理用于建设空间基础设施的机器人技术,暗示了未来在轨任务范围的扩大,技术上越来越先进的系统和设备,以及越来越重要的尺寸,将通过在航天器外进行的车外活动(EVA)在原地组装、安装和维护。
多年来,舱外活动已被证明是有用的--仅举几个例子--在国际空间站的服务和维护任务中,以及在哈勃太空望远镜上安装校正光学器件中,该望远镜是专门设计用来由宇航员直接在轨道上进行操作和修改的。
然而,英国林肯大学林肯自主系统中心的研究人员在2022年10月14日发表在《机器人和人工智能前沿》上的研究报告《用于太空装配任务的行走机器人操纵器的设计工程》中指出,"太空是一个极端的环境,不断使舱外作业面临风险,因此,就涉及开发复杂的大规模基础设施的未来任务而言,诸如在轨装配和维护的操作将远远超出人类的能力,需要自主机器人。
世界各地的空间机构正在研究的复杂基础设施中,有一个比哈勃及其继任者(詹姆斯-韦伯望远镜)更大的望远镜,这将促进一系列具有非凡科学价值的天文任务,旨在更深入地审视宇宙。
让我们看看--通过采用先进的机器人解决方案--根据林肯中心团队的说法,有可能从想法和概念到模拟能够在这样的项目中工作的机器。
用于空间基础设施的机器人技术:超越第一版E-Walker机器人
关于空间基础设施的机器人技术问题,2020年进行的研究--英国研究人员解释说--已经集中于设计一种名为E-Walker的行走机器人,作为有效组装大口径空间望远镜的潜在候选者。"行走机器人"(不要与 "仿人机器人 "相混淆)是指配备有运动装置的机器人系统,使其能够 "行走",在限定空间内移动。
第一个版本的 E-Walker 步行机器人的不同应用及其配置的概述(来源:“为太空装配任务设计一个步行机器人机械手”——林肯大学)
来自林肯自主系统中心的团队的工作提出了一个更新的E-Walker设计,使其能够在轨道上组装一个孔径(指采光区的直径)为25米的空间望远镜。
特别是,一个负责在太空中安装如此大的设备的机器人需要精确的特性,首先是超越单纯的 "常规太空行走 "的技能,有利于机动性。
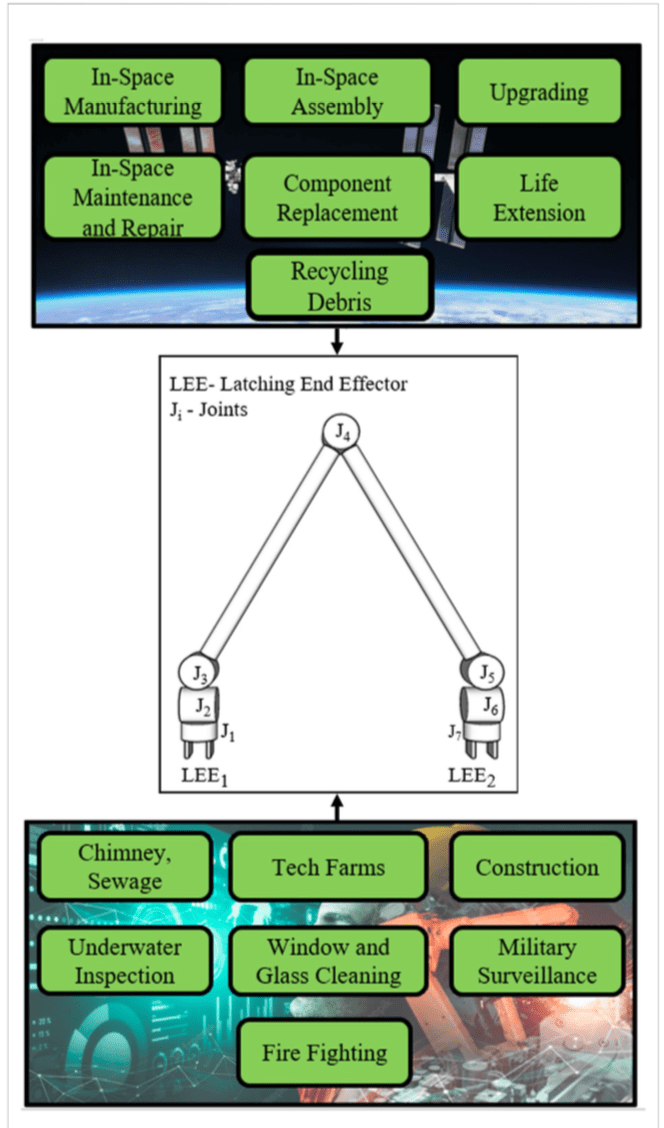
因此,新E-Walker的原型拥有四个肢体,具有七个不同程度的运动能力,使其能够移动到特定表面内的不同点,以执行多种任务。
两个肢体--胳膊和腿--都配备了一个 "锁扣末端效应"(LEE),以便锁住望远镜和航天器平台上的门。
"拟议的新模型的设计和移动能力提供了比传统基础上的固定机器人机械手大得多的工作空间。此外,研究人员指出,所提出的设计可以被视为未来项目的基础,例如用于设计孔径达100米的空间望远镜。
用于空间基础设施的机器人技术:重点是设计工程
在太空中建造基础设施的机器人方面,对行走机器人E-Walker的重新审视涉及到深入的设计,以优化关节连接和快速行动参数。
这使得机器人能够从表面的一端走到另一端,肩部、肘部和腕部关节保持一致,以实现平稳和对称的运动。
谈到对称性,研究小组指出,在机器的七个运动度能力中,有 "三个革命性的关节:一个在肩部,一个在手腕,一个在肘部",所有这三个关节都能够在组装的每个阶段与航天器的望远镜和平台接触。
"基地上的固定机器人机械手将需要一个全长的跨度来进行25米望远镜的组装。作者指出:"相反,新的E-Walker的尺寸可以减少,这取决于连接点的可用性和有效载荷的大小。
该系统将能够延长任务的生命周期,即使在组装后也能进行日常维护和服务环节,以及在地球上进行服务、维护和组装操作,包括风力涡轮机的操作。
最后,让我们记住,所设计的是一个原型,目前正在进行实验验证,以确认其有效性。
未来的研究
林肯大学关于在太空中建造基础设施的机器人的研究代表了未来研究的一个起点,该研究侧重于为日益复杂的在轨任务设计机器,首先是涉及的系统数量。
作者说,下一步将看到全面设计规格的最终确定(目前的设计只是一个小规模的原型)。此外,"一个用于陆地任务的小规模E-Walker原型正在开发中"。
他们解释说,这个原型,"可以在存在外部干扰和参数不确定性的情况下,通过稳健的空间控制器和精确的联合跟踪进行测试"。
鉴于对此事的极大兴趣,该部门的空间机构和行业已经开始为未来的轨道机器人任务开发自己的地图,以至于 ,在未来五到十年内研究人员有望开始工作以携带进一步开发机器人解决方案(例如 E-Walker)的评估和可行性,包括其侦察任务的原型设计,涉及孔径为 2.5 至 5 米的太空望远镜。
相关资讯
更多- 首届中国低空融媒大会圆满落幕:共筑新基建,开启低空视觉艺术与融媒发展新篇章
- 从概念落地成为实景!无人机应用场景“多点开花” 低空经济激活千亿市场
- 大漠大邀您共赴 CES 2026 | 和千架无人机共同点亮拉斯维加斯夜空
- 从空中8K全景到水下巡检:CES 2026 无人机创新指向“空水一体”的立体感知网络
- 教育观察④ | AI时代校本课程突围:从“百花齐放”到“三重融合”的体系重构
- 2025企业家博鳌论坛:无人机表演演绎“十五五”新机遇,千机科技携手新华社共绘低空经济蓝图!
- AOPA航拍应用技术课程十二月开班通告
- 火热报名!东莞无人机驾驶员(3-5级)职业技能等级证书,享补贴
- 教育观察③ | “新课标”引领课程转型:科技兴趣班从 “育分” 到 “育人” 的破局之路
- 教育观察② | “馆校协同”打通育人边界,凝聚育人合力