上海硅步ROS连载系列48期 移动机器人自主导航
转载 2018-06-01 08:30 上海硅步 来源:上海硅步
本期通过对turtlebot的Kinect深度传感器进行地图构建,并通过路径规划完成自主导航。
ROS定位导航的框架图如图1所示:
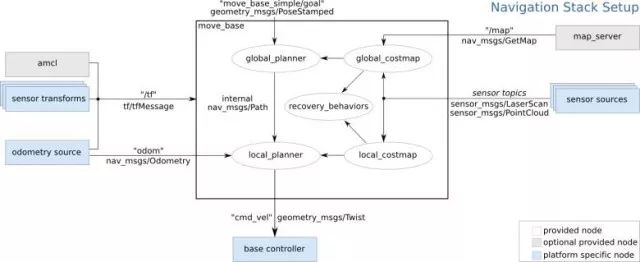
图1 ROS导航定位框架
其中move_base提供了ROS导航的配置、运 行、交互接口,它主要包括两个部分:
(1) 全局路径规划(global planner):根据给定的目标位置进行总体路 径的规划;
(2) 本地实时规划(local planner):根据附近的障碍物进行躲避路线 规划。
1.数据结构
ROS中定义了MoveBaseActionGoal数据结构来存储导航的目标位置数据,其中最重要的就是位置坐标(position)和方向(orientation)
$ rosmsg show MoveBaseActionGoal
显示结果如下:
[move_base_msgs/MoveBaseActionGoal]:
std_msgs/Header header
uint32 seq
time stamp
string frame_id
actionlib_msgs/GoalID goal_id
time stamp
string id
move_base_msgs/MoveBaseGoal goal
geometry_msgs/PoseStamped target_pose
std_msgs/Header header
uint32 seq
time stamp
string frame_id
geometry_msgs/Pose pose
geometry_msgs/Point position
float64 x
float64 y
float64 z
geometry_msgs/Quaternion orientation
float64 x
float64 y
float64 z
float64 w
2.配置文件
move_base使用前需要配置一些参数:运行成本、机器人半径、到达目 标位置的距离,机器人移动的速度,这些参数都在rbx1_nav包的以下几个配 置文件中:
l base_local_planner_params.yaml
l costmap_common_params.yaml
l global_costmap_params.yaml
l local_costmap_params.yaml
3.全局路径规划
在ROS的导航中,首先会通过全局路径规划,计算出机器人到目标位置的全局路线。这一功能是navfn这个包实现的。navfn通过Dijkstra最优路径的算法,计算costmap上的最小花费路径,作为机器人的全局路线。将来在算法上应该还会加入A*算法。
4.本地实时规划(local planner)
本地实时规划是利用base_local_planner包实现的。该包使用Trajectory Rollout 和Dynamic Window approaches算法计算机器人每个周期内应该行驶的速度和角度(dx,dy,dtheta velocities)。
base_local_planner这个包通过地图数据,通过算法搜索到达目标的多条 路经,利用一些评价标准(是否会撞击障碍物,所需要的时间等等)选取最优 的路径,并且计算所需要的实时速度和角度。
其中,Trajectory Rollout 和Dynamic Window approaches算法主要思路如下:
(1)采样机器人当前的状态(dx,dy,dtheta);
(2)针对每个采样的速度,计算机器人以该速度行驶一段时间后的状态,得出一条行驶的路线;
(3)利用一些评价标准为多条路线打分;
(4)根据打分,选择最优路径;
(5)重复上面过程。
5.ArbotiX仿真
安装ArbotiX模拟器:
$ sudo aptitude install ros-indigo-arbotix –y
下载rbx1例子:
$ cd catkin_ws/src
$ git clone https://github.com/pirobot/rbx1.git
为了简化,我们暂时使用空白地图(blank_map.pgm)在空地上进行无障碍仿真。首先运行ArbotiX节点,并且加载机器人的URDF文件:
$ roslaunch rbx1_bringup fake_turtlebot.launch
然后运行move_base和加载空白地图的launch文件(fake_move_bas
e_blank_map.launch):
$ roslaunch rbx1_nav fake_move_base_blank_map.launch
该文件的具体内容如下:
其中调用了fake_move_base.launch文件,是运行move_base节点并进行参数配置。
然后调用rviz就可以看到机器人了(如图2所示):
$ rosrun rviz rviz –d ~/ catkin_ws /src/rbx1/rbx1_nav/nav_obstacles.rviz
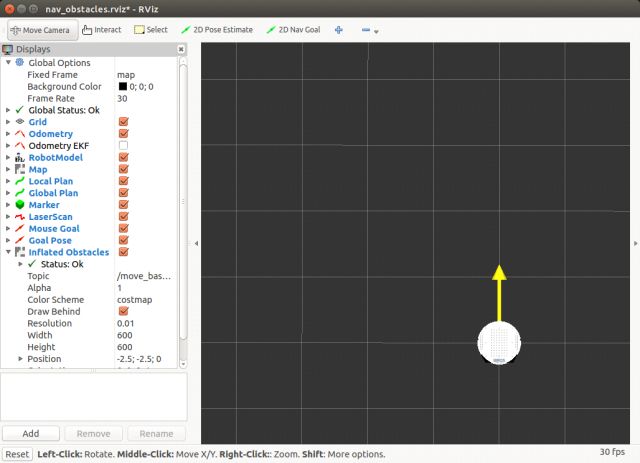
图2 使用Rviz进行TurtleBot仿真
我们先以1m的速度进行一下测试, 让机器人前进一米:
$ rostopic pub /move_base_simple/goal geometry_msgs/PoseStamped '{header: {frame_id:"base_link"},pose:{position:{x:1,y:0,z:0},orientation:{x:0,y:0,z:0,w:1}}}'
让机器人后退一米,回到原来的位置:
$ rostopic pub /move_base_simple/goal geometry_msgs/PoseStamped '{header: {frame_id:"map"},pose:{position:{x:0,y:0,z:0},orientation:{x:0,y:0,z:0,w:1}}}'
在rviz中的轨迹如图3:
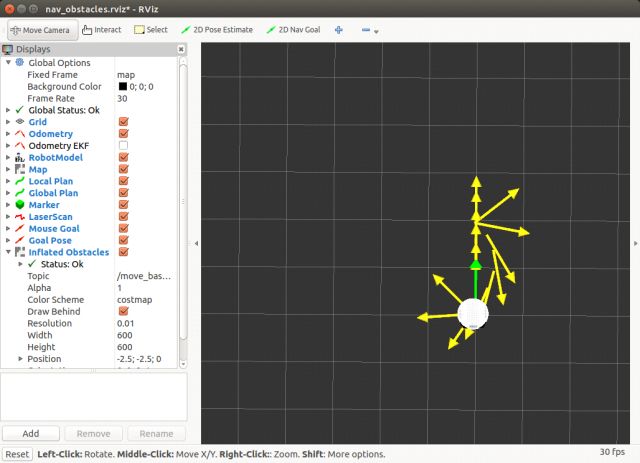
图3 TurtleBot运动轨迹
在机器人移动过程中,有一条蓝色的线(被黄线挡住了)就是机器人的全局规划的路径;红色的箭头是实施规划的路线,会不断更新,有的时候会呈现很大的弧线,那是因为机器人在转向的过程中尽量希望保持平稳的角度。如果觉得路径规划的精度不够,可以修改配置文件中的pdist_scale参数进行修正。然后我们可以认为的确定目标位置,点击rviz上方的2D Nav Goal按键,然后左键选择目标位置,机器人就开始自动导航了。
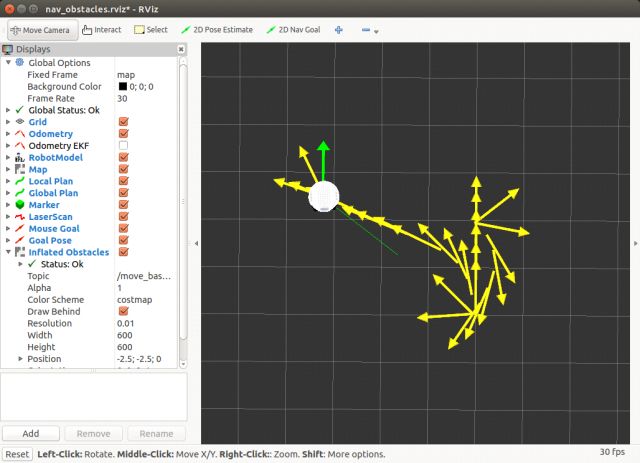
图4 TurtleBot自主导航
6.ArbotiX仿真——带有障碍物的路径规划
首先我们让机器人走一个正方形的路线。先通过上面的命令,让机器人回到原始位置(0,0,0),然后按reset按键,把所有的箭头清除,接着运行走正方形路径的代码:
$ rosrun rbx1_nav move_base_square.py
在rviz中可以看到图5所示的结果:
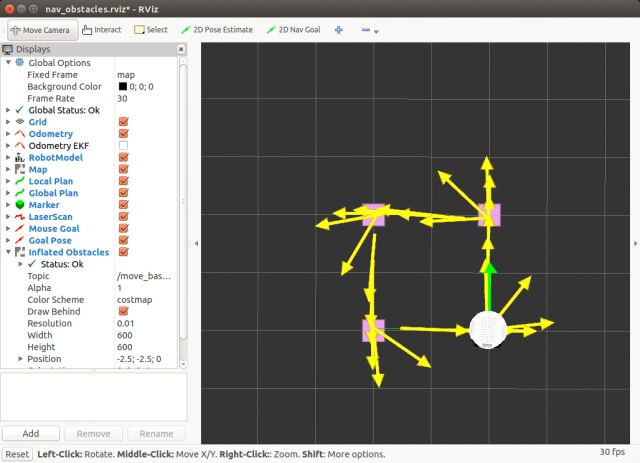
图5 TurtleBot绕正方形路径运动
图5中四个顶角的粉色圆盘就是我们设定的位置,正方形比较规则,可见定位还是比较准确的。TurtleBot绕正方形路径运动的代码如下:
#!/usr/bin/env python
import roslib; roslib.load_manifest('rbx1_nav')
import rospy
import actionlib
from actionlib_msgs.msg import *
from geometry_msgs.msg import Pose, Point, Quaternion, Twist
from move_base_msgs.msg import MoveBaseAction, MoveBaseGoal
from tf.transformations import quaternion_from_euler
from visualization_msgs.msg import Marker
from math import radians, pi
class MoveBaseSquare():
def init (self):
rospy.init_node('nav_test', anonymous="False)"
rospy.on_shutdown(self.shutdown)
# 设定正方形的尺寸,默认是一米
square_size = rospy.get_param("~square_size", 1.0) # meters
#创建一个列表,保存目标的角度数据
quaternions = list()
#定义四个顶角处机器人的方向角度
#将上面的Euler angles转换成Quaternion的格式
for angle in euler_angles:
q_angle = quaternion_from_euler(0, 0, angle, axes='sxyz')
q = Quaternion(*q_angle)
quaternions.append(q)
#创建一个列表存储导航点的位置
waypoints = list()
#创建四个导航点的位置(角度和坐标位置)
waypoints.append(Pose(Point(square_size, 0.0, 0.0), quaternion s[0]))
waypoints.append(Pose(Point(square_size, square_size, 0.0), quaternions[1])) s[2]))
waypoints.append(Pose(Point(0.0, square_size, 0.0), quaternion
waypoints.append(Pose(Point(0.0, 0.0, 0.0), quaternions[3]))
#初始化可视化标记
self.init_markers()
#给每个定点的导航点一个可视化标记
p = Point()
p = waypoint.position
self.markers.points.append(p)
#发布TWist消息控制机器人
self.cmd_vel_pub = rospy.Publisher('cmd_vel', Twist)
#订阅move_base服务器的消息
self.move_base = actionlib.SimpleActionClient("move_base", Move
BaseAction)
rospy.loginfo("Waiting for move_base action server...")
# 等待move_base服务器建立
self.move_base.wait_for_server(rospy.Duration(60))
rospy.loginfo("Connected to move base server")
rospy.loginfo("Starting navigation test")
#初始化一个计数器,记录到达的顶点号
i = 0
# 主循环,环绕通过四个定点
while i < 4 and not rospy.is_shutdown():
# 发布标记指示四个目标的位置,每个周期发布一起 self.marker_pub.publish(self.markers)
#初始化goal为MoveBaseGoal类型
goal = MoveBaseGoal()
在实际中,往往需要让机器人自动躲避障碍物。move_base包的一个强大的功能就是可以在全局规划的过程中自动躲避障碍物,而不影响全局路径。障碍物可以是静态的(比如墙、桌子等),也可以是动态的(比如人走过)。现在我们尝试在之前的正方形路径中加入障碍物。
把之前运行fake_move_base_blank_map.launch的终端停止(CtrlC)掉,然后运行:
$ roslaunch rbx1_nav fake_move_base_obstacle.launch
运行结果如图6所示,在rviz中出现了障碍物:
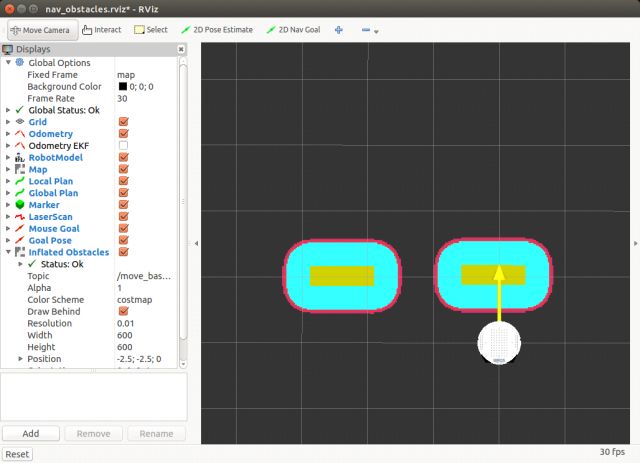
图6 Rviz中出现的障碍物
然后再运行之前绕正方形运动的节点:
$ rosrun rbx1_nav move_base_square.py
这回可以看到,在全局路径规划的时候,机器人已经将障碍物绕过去了,如图7所示:
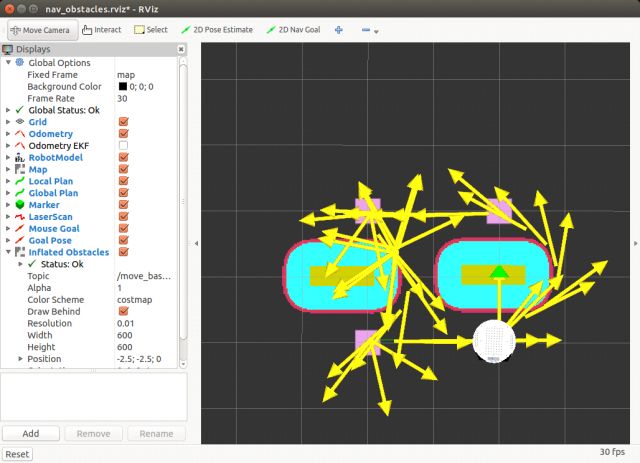
图7 TurtleBot避障
图7中,中间的线是障碍物,周围红色的椭圆形是根据配置文件中的inflation_radius参数计算出来的安全缓冲区。全局规划的路径基本已经是最短路径了。在仿真的过程中也可以动态重配置那四个配置文件,修改仿真参数。
7.实物测试
首先启动turtlebot:
$ roscore
$ roslaunch turtlebot_bringup minimal.launch
运行地图绘制demo:
$ roslaunch turtlebot_navigation maping_demo.launch
打开rviz查看地图:
$ roslaunch turtlebot_rviz_launchers view_navigation.launch
通过键盘控制机器人移动,建立地图:
$ roslaunch turtlebot_teleop keyboard.launch
建图过程如图8所示:
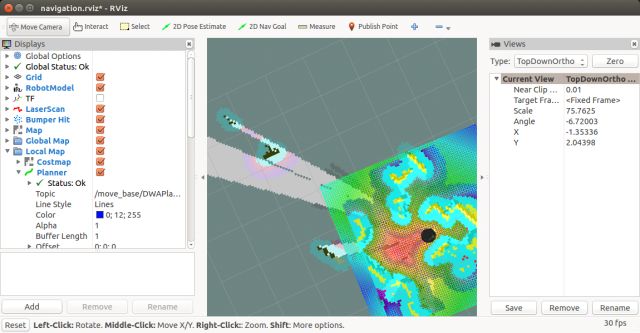
图8 TurtleBot建图
此时,可以选中2D Pose Estimate,然后用鼠标选中一个位置单击鼠标左键,机器人就会移动至你所指定的位置。
要保存建立的地图,运行:
$ rosrun map_server map_saver –f /tmp.my_map
要加载保存过的地图,运行:
$roslaunch turtlebot_navigation amcl_demo.launch
map_file:=/tmp/my_map.yaml
接下来的操作和上面一样,机器人会根据你指定的位置进行自主导航。
相关资讯
更多- 海报剧透:“不止于飞行”的新一代空中机器人,藏着什么惊喜?
- 紫燕 7 月热招岗位|与逐梦者并肩,丈量山河理想
- 以家之名,共赴长空 | 2026沃飞长空家庭日全纪录
- 飞鹏动态 | 时代飞鹏受邀出席中石油昆仑资本2026 产投融协同发展研讨活动
- 【精飞要闻】郴州移动调研精飞产教融合基地、共探产教融合新路径
- 圆满收官!智翔航空全程护航第十六届全国交通运输行业职业技能大赛安徽省选拔赛
- 行业标杆认可!鲲鹏智汇入选2026年度仓储业数智化应用案例
- 中国遥感飞机首飞40周年 航空遥感实现从引进改装到自主创新跨越
- 星逻智能出席低空装备与应用交流会并发表演讲
- 十七年技术沉淀,数万次实飞验证,AT系列固定翼动力耐用可靠看得见!