AoriFlightSim飞行仿真引擎 - 传感器仿真
转载 2023-06-02 09:42 武汉傲睿尔科技 来源:武汉傲睿尔科技
2023年马上悄然进入年中,转眼即将步入2023下半年,感谢这么多年来对傲睿尔的关注。
不积跬步、无以至千里。不积小流、无以成江海,两年来,对AoriFlightSim自研飞行仿真引擎的持续打磨,使我们的飞行仿真产品日渐成熟。
本次公布的内容为无人机传感器相关的仿真内容、让我们一起看看主要有哪些新特性吧~
传感器仿真
AoriFlightSim飞行仿真引擎可通过光学传感器成像仿真(含可见光、红外和激光雷达)实现无人系统对环境感知仿真,提供RGB相机及其视频流输出、激光雷达及其点云数据实时生成,可以广泛应用于无人系统算法验证。
· 可见光仿真
摄像头仿真基于环境物体的几何空间信息构建对象的三维模型,并根据物体的真实材质与纹理,通过计算机图形学对三维模型添加颜色与光学属性等,包括单目、双目和鱼眼摄像头的仿真。

▲多类型摄像头仿真

▲ 摄像头仿真效果--晴天

▲ 摄像头仿真效果--阴天
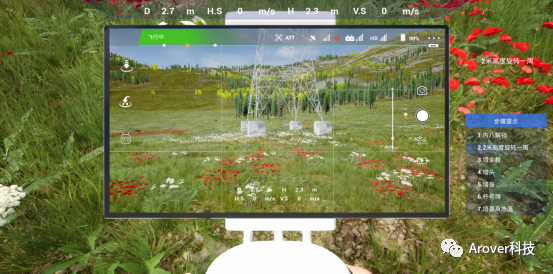
▲摄像头仿真效果---图传视角
红外仿真
AoriFlightSim飞行仿真引擎实时生成高精度的红外成像图及各类红外评估指标。仿真引擎经过了多套试验数据校核和调优,具有了较高精度和实时计算效率。摄像头仿真通过坐标系转换的方法,将三维空间中的点通过透视关系变换为图像上的点。对相机镜头的结构与光学特性,相机传感器数据采集和处理过程,相机图像信号处理过程,以及部分集成AI芯片的相机目标级识别结果进行仿真。具体流程如下:

▲ 摄像头仿真过程
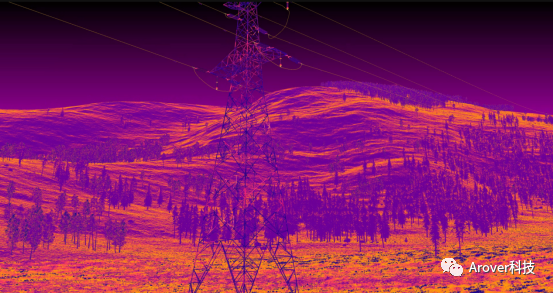
▲ 摄像头仿真-红外(铁红)
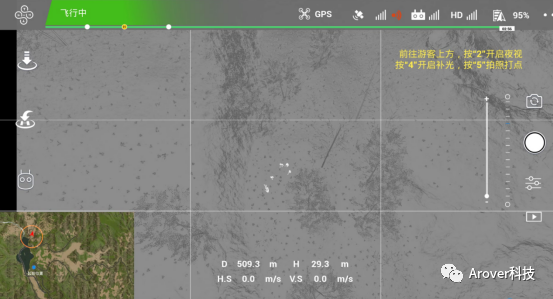
▲ 摄像头仿真-红外(白热)
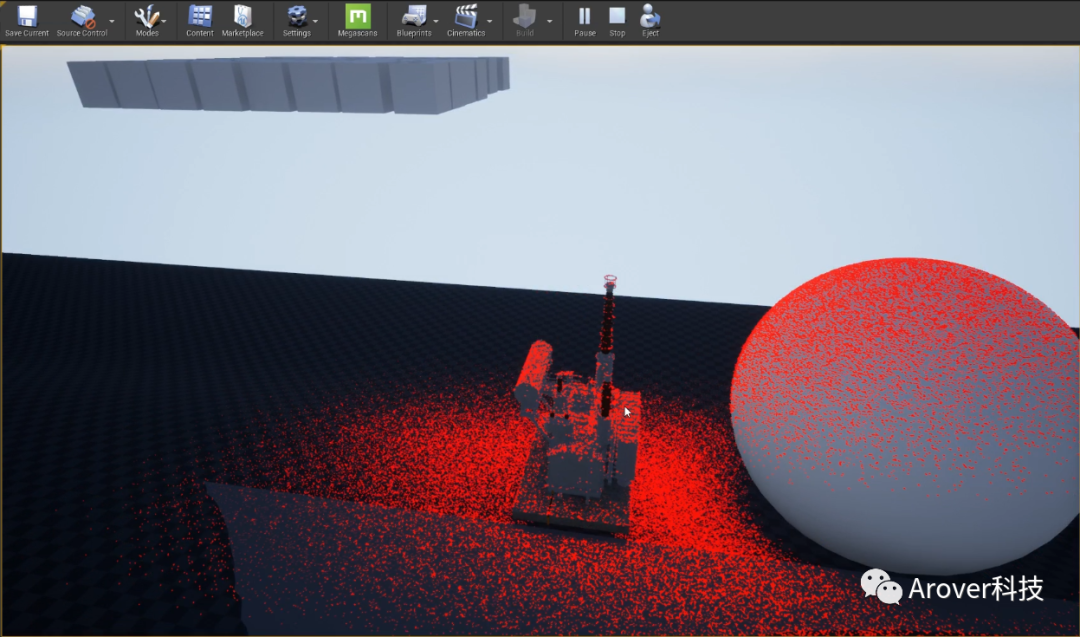
· 激光雷达仿真
激光雷达仿真模拟雷达光电发射和接收的工作过程,激光束与仿真场景中所有物体求交,根据相交点的物理材质类型和属性计算出该点的激光反射强度和噪声。
AoriFlightSim仿真引擎使用基于GPU加速的激光雷达仿真方法和RTX显卡实时光线追踪技术,仿真出无限接近于真实世界的激光雷达点云。
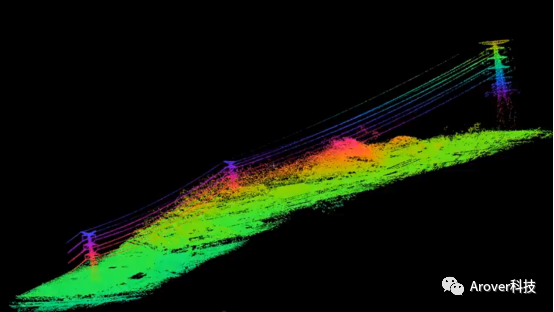
▲ 激光雷达仿真点云--输电线路
激光雷达反射强度受到障碍物距离、激光反射角度以及障碍物本身的物理材质影响,仿真时需要给场景资源设置合适的物理材质,包括各种杆塔、花草树木、地形、水文、障碍物、线路走廊等。AoriFlightSim仿真引擎从真实雷达扫描数据中提取反射强度模型驱动仿真模型,通过实际标定获得物理材质在当前激光雷达下的反射强度和噪声。
▲ 激光雷达仿真点云--自研引擎实验
· 仿真测试
针对电力领域高质量标记数据不足的情况,利用虚拟样本结合少量人工标记样本迭代式増量学习的方法,通过电力场景绝缘子自爆、防震锤缺失等实验表明,对于不同数量的实际训练样本,通过添加虚拟样本扩大训练集后,图像目标识别率均会得到提高,尤其在小样本的情况下,识别率提高非常显著,同时本方法在军工等领域均有较好的应用前景。

▲ 虚拟样本效果图--绝缘子自爆

▲ 虚拟样本效果图--桥洞积水
相关资讯
更多- 重载无人机驰援雪域高原!容祺KTZ3列装云南迪庆消防,科技重塑高原救援新战力
- 迎汛而上,空中巡防丨低空遥感赋能多地防台应急
- 重大突破!宏图一号四星编队SAR攻克热带雨林监测难题 国产卫星赋能全球森林碳汇核算
- 扬帆“十五五”,开启低空经济新篇章
- 央视新闻联播聚焦深圳福田无人机AI新应用
- 国产“Lattice OS”——天枢OS | 直面“低慢小”蜂群威胁,以群反群重塑低空防御体系
- 云卓科技|以科技启迪成长,以责任守护未来
- 百城齐飞|云享飞招募城市点亮官
- 寻根逐梦科创未来!2026“亲情中华·中国寻根之旅”夏令营走进东莞无人机科普基地
- 【精飞要闻】精飞集团受邀赴云南高素质农民培育项目管理人员培训班授课 共探低空经济赋能智慧农业人才培育新路径