多旋翼无人机的控制分配
转载 2019-11-11 10:30 威海程航 来源:威海程航
引 言
本文内容主要阐述控制分配在多旋翼无人机上的使用方法,想要更多了解“控制分配”的朋友可以在无人机系统技术公众号内回复“控制分配”获取两篇经典参考文献。
控制分配最先在飞行控制系统设计中提出,目前已推广至许多工程实际中,如船舶动力学、地面车辆动力学等。其基本思想是将上层控制指令依据某种优化目标分配给冗余的执行机构,并确保满足执行机构的约束条件。控制分配算法的研究经历了从简单到复杂、从静态优化到动态优化、从单目标优化到多目标优化的发展过程。
什么是控制分配?
关注我公众号比较早的朋友应该知道我前面写了很多篇文章来介绍控制器的架构以及控制律的设计。新关注的朋友可以先去看看前面的文章。我们在这里整理一下:
PX4姿态控制算法详解
无人机控制器设计(一):入门简介
无人机控制器设计(二):位置控制器设计
无人机控制器设计(三):基于欧拉角的姿态控制器设计
那么看过文章的朋友应该知道控制律的输出往往不是直接对应的执行机构。以电动无人机为例,多旋翼无人机的执行机构一般是电机,我们通过控制电机转速来实现飞机的姿态变化,进而控制飞机的速度、位置。而无人直升机的执行机构一般是电机加舵机,电机用于控制主旋翼和尾桨的转速,舵机用于控制总距、纵向周期变距、横向周期变距、尾桨距。固定翼无人机的执行机构与无人直升机类似,电机控制推进桨的转速,舵机控制升降、副翼、方向。
除固定翼无人机的控制分配相对简单之外,多旋翼无人机和无人直升机的控制分配都较为复杂,今天我们先来了解多旋翼无人机的控制分配方法。
先来回顾一下控制律设计部分的输出,最后得到的是期望升力、三轴期望力矩。而多旋翼无人机的执行机构是各个电机,所以,控制分配在这里要完成的任务就是根据某些约束条件将期望升力、三轴期望力矩映射到电机的转速上来。
而一般情况下我们的约束条件就是电机的转速上下限,有时候为了给姿态控制留下足够的裕度,我们也会给定油门的限制范围,或者在姿态控制出现电机饱和的时候优先保障姿态控制,减弱油门控制。
多旋翼无人机的控制分配矩阵求解
在目前的绝大部分飞控中,控制分配的作用主要是将虚拟控制输出映射到具体执行机构的输出,也就是求取期望升力、期望力矩到各电机期望转速的映射矩阵。
今天我们以“X”型四旋翼和“X”型六旋翼为例说明控制律虚拟控制输出到各电机转速之间的映射关系。
“X”型四旋翼
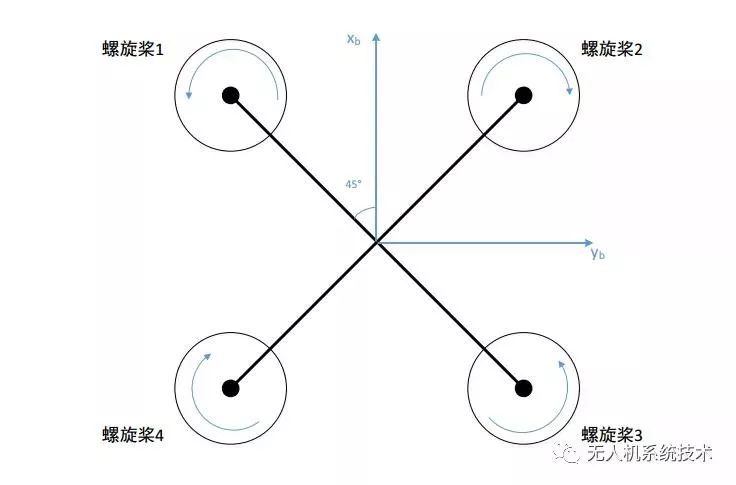
假设控制律得到期望的升力和期望力矩分别为:
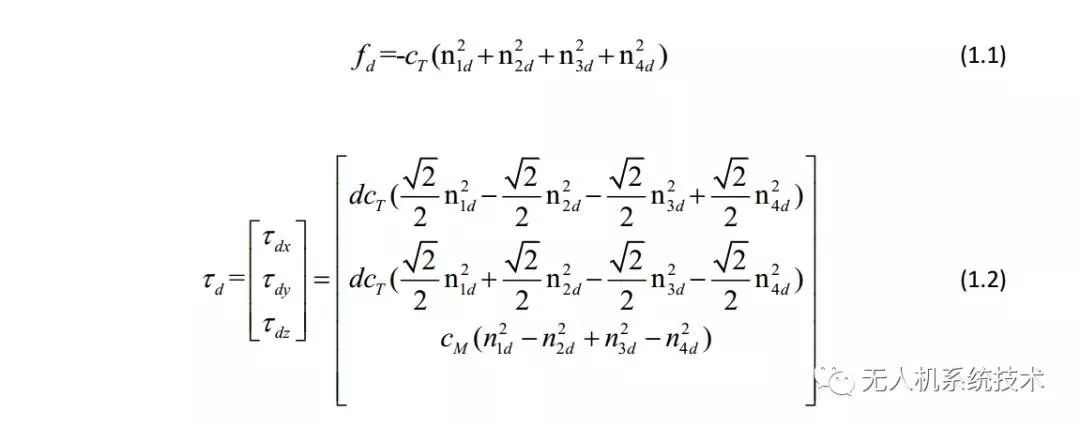
在实际飞控系统中,CT和CM是很少去精确测量,而是通过调节控制律参数来实现通道间的差别。为此我们稍微修改一下控制效率模型:
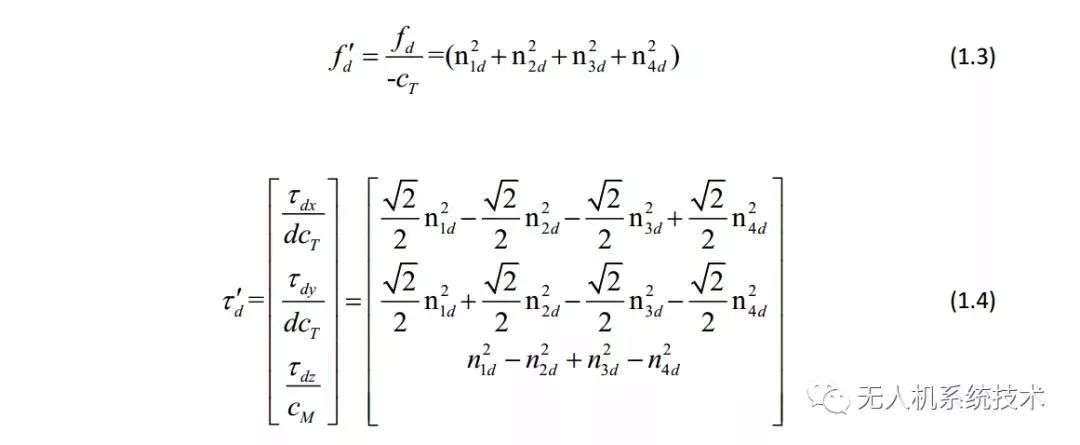
可以进一步写成:

由于矩阵M可逆,所以有:
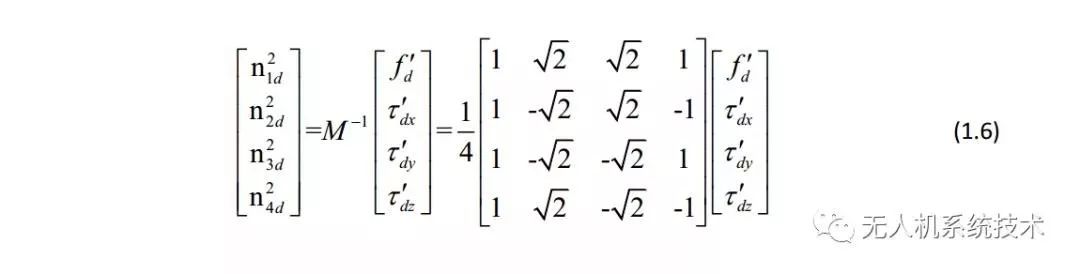
因此对于X型四旋翼来说,控制分配矩阵是唯一的。
“X”型六旋翼
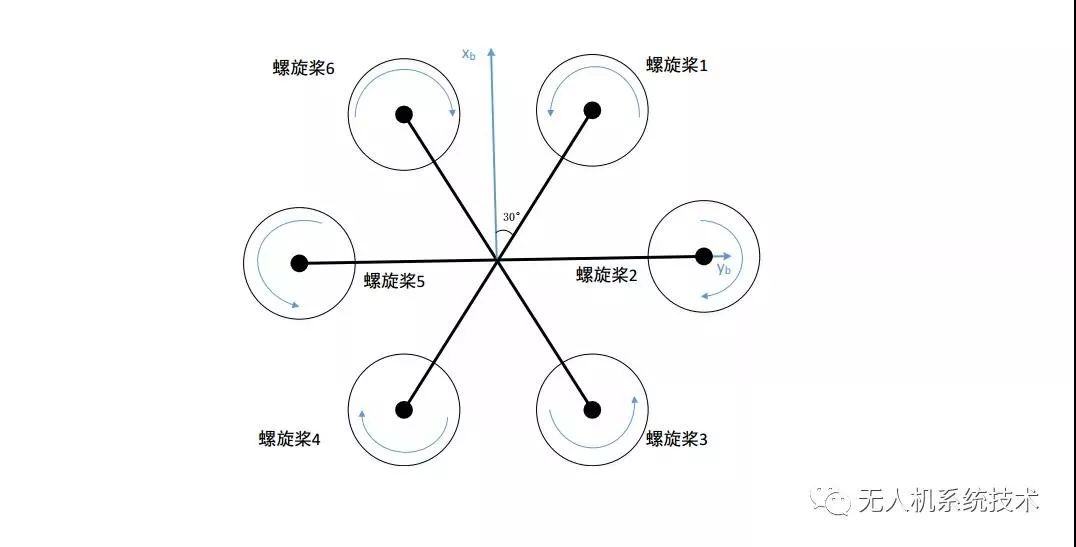
X型六旋翼的计算方法与X型四旋翼类似,只不过六旋翼的执行机构是六个,而要控制的量只有四个:升力、三轴力矩,所以其分配矩阵不唯一,我们一般通过求取伪逆得到控制分配矩阵,大家可以想一想为什么是伪逆?
假设控制律得到的期望升力和期望力矩为:

与四旋翼类似,我们也是通过调节控制律中的参数来匹配CT、CM、d这些未知参数
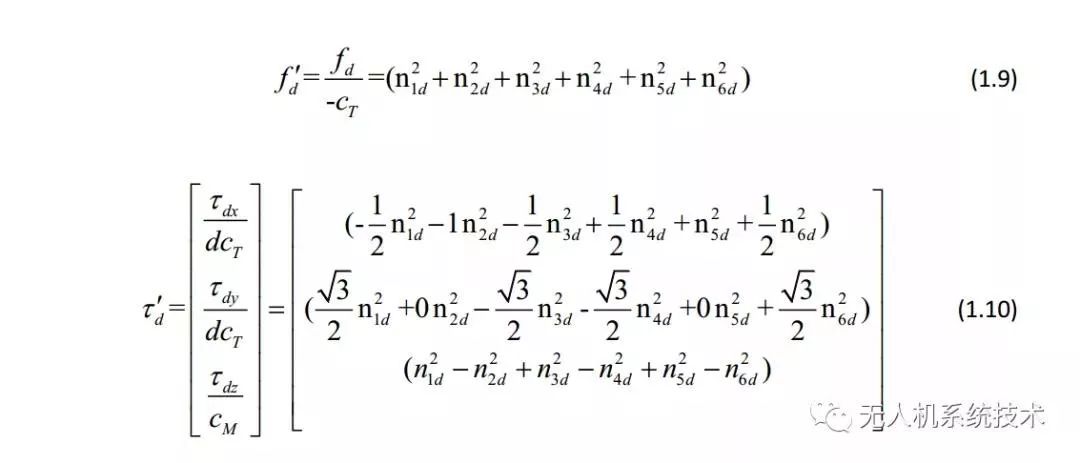
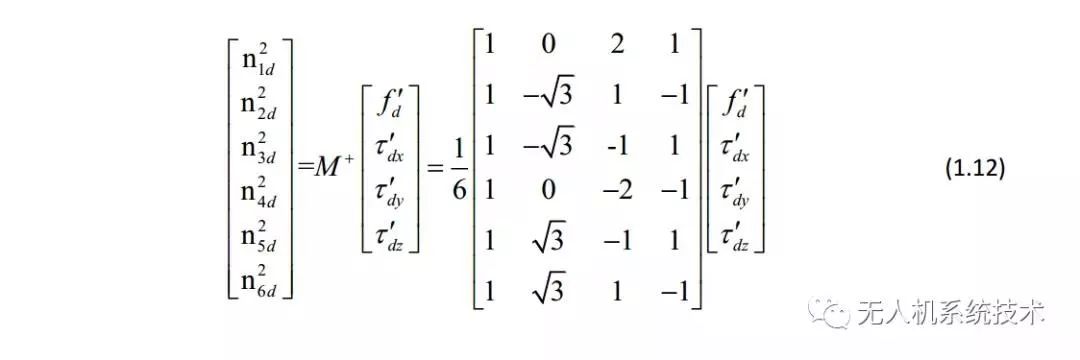
上述公式可以进一步写成:
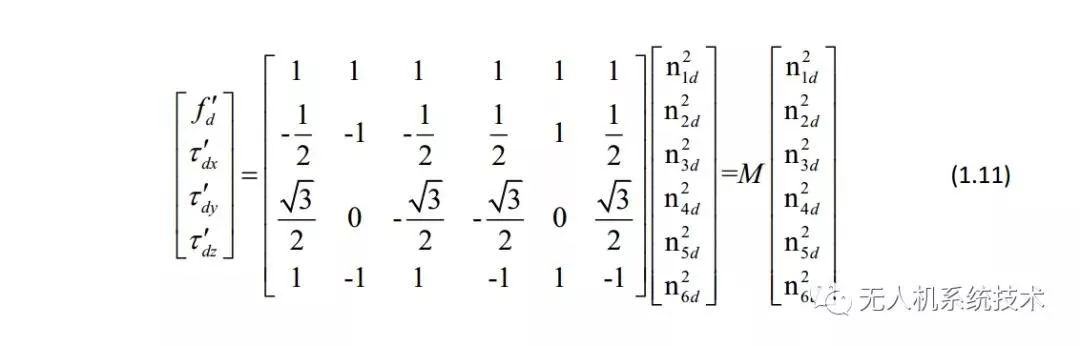
所以X型六旋翼的电机期望转速为:
总 结
本文的控制分配主要是对虚拟控制输出与执行机构之间的映射关系进行了描述,这是控制分配最基本的使用方法。实际上,控制分配在无人机单个或多个执行机构出现故障并失效时如何重新分配控制矩阵,保证飞行器能够安全飞行,这个才是我们应该着重考虑的问题,有兴趣的朋友可以先自行研究。
相关资讯
更多- 从低空蓝图到应用实景,中科星图打造山西长治“低空高速”新模式
- 告别高空高危作业!这款建筑安全体检黑科技,效率飙升 5-10 倍!
- 大语言模型+无人机算法,创造无限可能,你的算法由你来定义
- 科技赋能,守护水安全:航天宏图水利遥感SaaS服务平台,让治水更“智慧”
- 电量随时满格!氢航Hypal氢能户外电源,助力晚高峰无人机巡逻效率超级加倍!
- 白鲸航线成功完成W5000飞机全机地面共振试验
- 一探eVTOL之「芯」——想飞起来需要怎样的电池?
- 司南技术π (第7期) | GNSS抗干扰全景实测 —— QC7820芯片对比解析
- 凌云 U15 无人机 GPS 拒止(无 GPS )环境下多源融合导航作业方案
- 数字孪生流域筑牢山洪防线——航天宏图“黑科技”让山洪灾害预警更智能