无人机接收机的PPM协议
转载 2020-10-26 10:35 硬件十万个为什么 来源:硬件十万个为什么无人机遥控器与飞控之间传输最常用的就是PWM,PPM,S.BUS等协议。其中PPM协议只需要一根线就可以传输,避免了PWM需要多路才能传输多个通道的问题。
下面是PPM协议的波形图

PPM协议最多传输20个通道,使用一个定时器就可以轻松解决了。
PWM协议
PWM信号用于控制单个电调或者单个舵机脉冲宽度调制信号。
电机(电调)上用到PWM信号种类很多,我们这里对常见的PWM信号特征进行一个描述:
1、 PWM信号是一个周期性的方波信号,周期为20ms,也就是50Hz的刷新频率。
2、 PWM每一周期中的高电平持续时间为1~2ms(1000us~2000us),代表了油门控制量。一般四旋翼中1100us对应0油门,1900us对应满油门。
PCM是英文pulse-code modulation的缩写,中文的意思是:脉冲编码调制,又称脉码调制。PPM是英文pulse position modulation的缩写,中文意思是:脉冲位置调制,又称脉位调制,这里顺便提一句,有些航模爱好者误将PPM编码说成是FM,其实这是两个不同的概念。前者指的是信号脉冲的编码方式,后者指的是高频电路的调制方式。比例遥控发射电路的工作原理如图1所示。操作通过操纵发射机上的手柄,将电位器组值的 变化信息送人编码电路。编码电路将其转换成一组脉冲编码信号(PPM或PCM)。这组脉冲编码信号经过高频调制电路(AM或FM)调制后,再经高放电路发送出去。PPM的编解码方式一般是使用积分电路来实现的,而PCM编解码则是用模/数(A/D)和数/模(D/A)转技术实现的。
目前,比例遥控设备中最常用的两种脉冲编码方式就是PPM和PCM:最常用的两种高频调制方式是FM调频和AM调幅:最常见的组合为PPM/AM脉位调制 编码/调幅、PPM/FM脉位调制编码/调频、PPM/FM脉冲调只编码/调频三种形式。通常的PPM接收解码电路都由通用的数字集成电路组成,如 CD4013,CD4015等。对于这类电路来说,只要输入脉冲的上升沿达到一定的高度,都可以使其翻转。这样,一旦输入脉冲中含有干扰脉冲,就会造成输 出混乱。由于干扰脉冲的数量和位置是随机的,因此在接收机输出端产生的效果就是“抖舵”。除此之外,因电位器接触不好而造成编码波形的畸变等原因,也会影 响接收效果,造成“抖舵”。对于窄小的干扰脉冲,一般的PPM电路可以采用滤波的方式消除;而对于较宽的干扰脉冲,滤波电路就无能为力了。这就是为什么普 通的PPM比例遥控设备,在强干扰的环境下或超出控制范围时会产生误动作的原因。尤其是在有同频干扰的情况下,模型往往会完全失控。
每一个遥控器通道都需要一个PWM采集器进行采集,但是对于STM32来说不可能使用多个定时器来采集多个通道的PWM,这对于STM32的资源来说十分浪费。因此采用的就是PPM编码。PPM编码是PWM的扩展协议,可以在一个管脚中传输多路PWM信号。PPM的频率通常是50Hz,周期长度20ms,每一个周期中可以存放最多10路PWM信号,每一路PWM的周期为2ms,如下图所示:
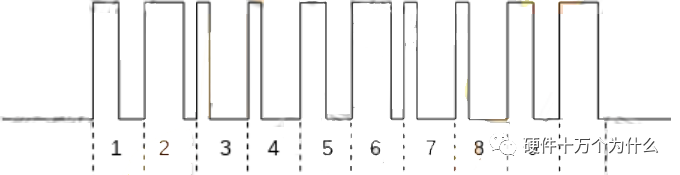
使用STM32的管脚中断配合定时器中的计数可以准确的捕获一个周期内的PPM信号中的高低电平变化,每2ms就是一路PWM信号的周期。
相关资讯
更多- 大语言模型+无人机算法,创造无限可能,你的算法由你来定义
- 科技赋能,守护水安全:航天宏图水利遥感SaaS服务平台,让治水更“智慧”
- 电量随时满格!氢航Hypal氢能户外电源,助力晚高峰无人机巡逻效率超级加倍!
- 白鲸航线成功完成W5000飞机全机地面共振试验
- 一探eVTOL之「芯」——想飞起来需要怎样的电池?
- 司南技术π (第7期) | GNSS抗干扰全景实测 —— QC7820芯片对比解析
- 凌云 U15 无人机 GPS 拒止(无 GPS )环境下多源融合导航作业方案
- 数字孪生流域筑牢山洪防线——航天宏图“黑科技”让山洪灾害预警更智能
- 突破时刻 | 时代飞鹏圆满完成高温极限环境实验,无人机硬核性能获严苛验证
- 星图超算云网:搭建算力桥梁,构建空天信息新基建算力引擎