新品上架 | F200——搭载基于模型设计的国产开源飞控系统无人机
转载 2022-06-17 11:16 阿木实验室 来源:阿木实验室一、产品简介
F200是目前基于FMT开源自驾仪项目开发的第一款无人机产品,旨在为广大无人机爱好者和科研工作者提供一个理想的无人机研发与测试平台。支持室外定高、定点,一键起飞,一键降落,一键返航,航点规划等功能。后续添加光流、激光传感器的导航支持后,可支持室内无GPS的定点功能,以下由阿木实验室-潇齐为大家带来F200实机测试视频:F200使用最新的FMT固件,提供了一整套商用级多旋翼算法模型,包括导航、控制、状态机和被控对象模型等。基于MATLAB/Simulink图形化编程方式快速构建算法模型,通过先进的仿真技术对算法进行闭环验证。同时支持代码一键生成,无缝合入嵌入式飞控系统,省去手动编写代码的繁琐并提高代码的效率与可靠性。

二、FMT项目简介
FMT是首个基于模型开发(Model-based-design,MBD)的开源自驾仪系统,其软件生态由以下三部分组成:
FMT-Firmware:C语言开发的高性能飞控嵌入式软件系统。
FMT-Model:基于MATLAB/Simulink搭建的MBD仿真平台。
FMT-Sim:基于3D引擎实现的模拟仿真环境,提供逼真的渲染效果和丰富的仿真场景。

C语言实现的轻量级、高实时、高性能的嵌入式软件系统,支持C/C++混合编译。
基于国产RTOS RT-Thread, 拥有活跃的开源社区以及丰富的第三方组件。
支持MBD(Model-based Design)全流程开发,MIL、SIL、HIL以及SIH仿真支持。
基于Matlab/Simulink实现的算法和模型库,图形化编程,支持仿真和自动代码生成。
支持Mavlink协议以及开源地面站QGroundcontrol。
支持广泛使用的开源硬件Pixhawk/Pixhawk4等,以及QEMU模拟器。
采用跨平台的开发工具链,支持Win/Linux/Mac等平台的开发。
FMT构建了从嵌入式软件到建模与仿真三位一体的无人控制系统研发/测试平台,为了方便大家零距离了解FMT项目,下面是FMT作者Echo为大家带来的项目介绍视频:
FMT固件优势:
相比PX4/APM,FMT的固件更加精简,这体现在更小的固件大小,更低的CPU和RAM使用率。以下是在Pixhawk 4硬件上FMT与PX4的一个简单对比:
| Pixhawk4 (FMUv5) |
| FMT | PX4 | |
| 固件大小 | ~650 KB | ~1908 KB |
| CPU使用率 | ~24% | ~64% |
| 内存使用率 | ~42% | ~71% |
| 实时性 | 高(us) | 中(ms) |
| 导航算法运行频率 | 500 Hz | 200 Hz |
| 控制算法运行频率 | 500 Hz | 250 Hz |
| 状态机运行频率 | 250 Hz | 100 Hz |
三、使用场景/开发方向
| 使用场景/开发方向 | |
| 无人机基础知识入门 | √ |
| 无人机开发基础入门 | √ |
| 飞控底层嵌入式软件二次开发,如传感器驱动等 | √ |
| 飞控导航,控制算法二次开发与验证 | √ |
| 无人机通讯协议开发与验证 | √ |
| 室外GPS环境下 | √ |
| 无GPS环境下 | 后续添加光流、激光传感器,UWB等的导航支持后方可支持室内无GPS的定点功能 |
| 基于模型开发 | √ |
| 软件在环,硬件在环,模型在环,纯硬件仿真,开环仿真 | √ |
| 3D视景仿真 | √ |
| FMT开发者团队技术支持 | √ |
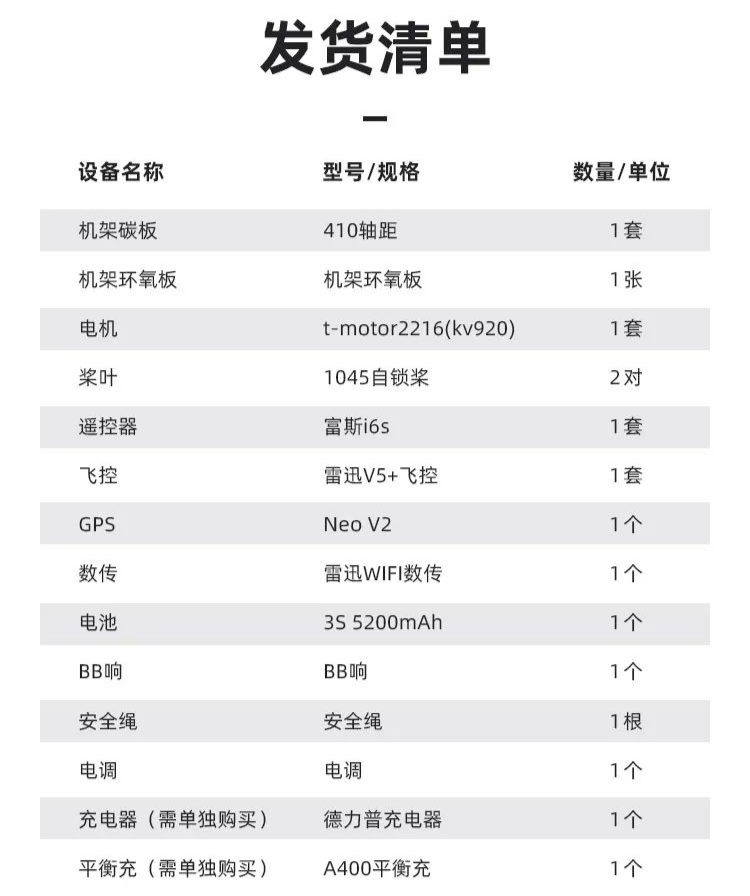
四、技术参数及配套资料

查看《F200无人机使用手册》请前往地址:https://wiki.amovlab.com/public/fserieswiki/
FMT项目地址:https://github.com/Firmament-Autopilot五、预定福利F200作为目前唯一一款基于FMT开发的无人机,考虑到大部分无人机开发者对FMT开源项目暂时还不够熟悉,因此,凡是购买F200无人机的开发者,我们除提供学习课程和资料之外,还将额外赠送为期31天的专属答疑服务,由FMT开源项目主要开发者一对一答疑。考虑到FMT作者的时间安排,也进一步保证答疑质量,目前F200无人机答疑服务限定100个名额,售完即止。
